# 里程计校准
FDISYSTEMS的产品支持外部输入里程计数据进行组合导航,同时也支持里程计的刻度因子校准以及惯导-载体安装误差角校准。
# 里程计输入格式说明
FDISYSTEMS的产品支持用户通过串口或者CAN总线输入里程计数据,在上位机中将对应COMM口配置为External Odom即可。配置界面如下图所示(CAN总线输入方式),配置过后保存重启生效:
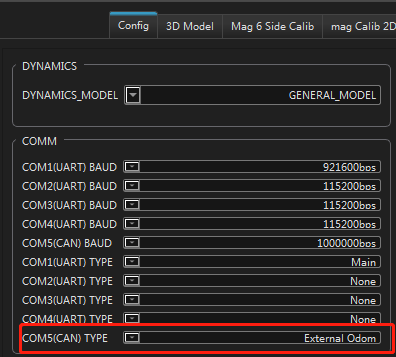
其输入格式必须符合FDILink协议格式,具体可见第11章第一节数据帧定义部分:
载荷部分的定义如下:
| Packet ID | 0x90 | ||||
|---|---|---|---|---|---|
| Offset | Size | Format | Field | Unit | Description |
| 0 | 1 | uint8_t | TYPE | 里程计输入类型,输入4表示单轮速度输入,输入2表示双轮速度输入 | |
| 1 | 4 | uint32_t | Microseconds | us | 输入数据时间戳 |
| 5 | 16 | float32_t | Wheel_rate[4] | m/s | TYPE等于4时只需要给Wheel_rate[0]赋值,TYPE等于2时需要给Wheel_rate[0]和Wheel_rate[1]赋值 |
下面给出里程计输入数据的一帧示例:
FC 90 15 C6 4F 78 5F 02 92 02 31 03 5D C2 17 41 5A C0 19 41 00 00 00 00 00 00 00 00 FD
其中红色数据表示type,数值转换到十进制等于2,即需要输入两个轮速;
绿色数据表示时间戳,数值转换到十进制等于53543570us;
紫色数据表示Wheel_rate[0],数值转换到十进制等于9.48m/s;
蓝色数据表示Wheel_rate[1],数值转换到十进制等于9.61m/s;
## 刻度因子校准
FDISYSTEMS提供了两种里程计刻度因子校准方法,其位于Config主界面的Odom界面内,如下图所示:
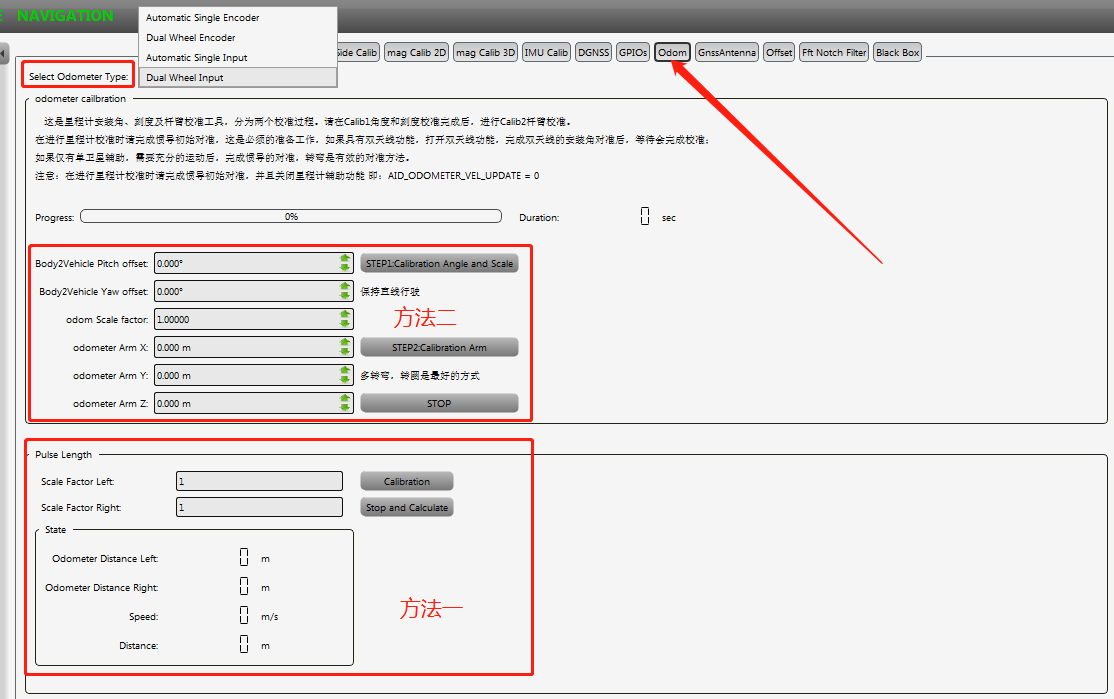
# Select Odommeter type:
表示接入的里程计数据类型,分别为脉冲式输入和转速(速度)输入。脉冲信号通过GPIO输入,转速(速度)通过CAN输入。
# 里程计刻度因子:
指的是载体实际运动速度(距离)与里程计输出的速度(距离)的比值,理想情况下比值为1。但由于受到载体的轮胎充气和磨损,路面打滑等因素影响,实际上该值不是1。通过对里程计刻度因子的校准,从而提高导航的定位精度。校准刻度因子需要用到其他测量速度(距离的)传感器,下面介绍的方法一和方法二均采用GPS数据辅助计算里程计刻度因子。
# 方法一: 简易校准工具
该方法采用GPS辅助对里程计刻度因子进行校准,GPS定位精度越高,计算出来的里程计刻度因子越准确。该方法的原理是通过计算一段距离里程计输出的路程,和GPS计算的路程相比,从而计算得出里程计刻度因子,因此需要载体在校准过程中直线行驶。
操作步骤:
# A. 开始
GPS定位有效,里程计数据输入正常的前提下点击Calibration按钮,此时下面state状态栏里开始实时显示数据,具体为:
Odometer Distance Left:左轮里程计计算出来的当前位移;
Odometer Distance Right:右轮里程计计算出来的当前位移;
Speed:GPS接收机获得的载体实时速度;
Distance:通过GPS接收机计算出来的当前位移;
# B. 刻度因子估计
在Distance显示的位移充足的情况下(推荐20m以上),点击Stop and Calculate按钮进行计算,此时在Scale Factor Left和Scale Factor Right右侧的框中会显示计算的里程计刻度因子,如下图所示。
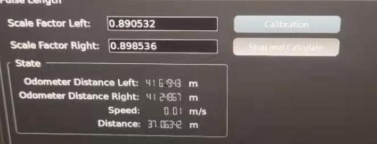
此时两个参数已自动写入模组flash内,用户如果觉得不满意的话可以重复A->B步骤重新进行校准。
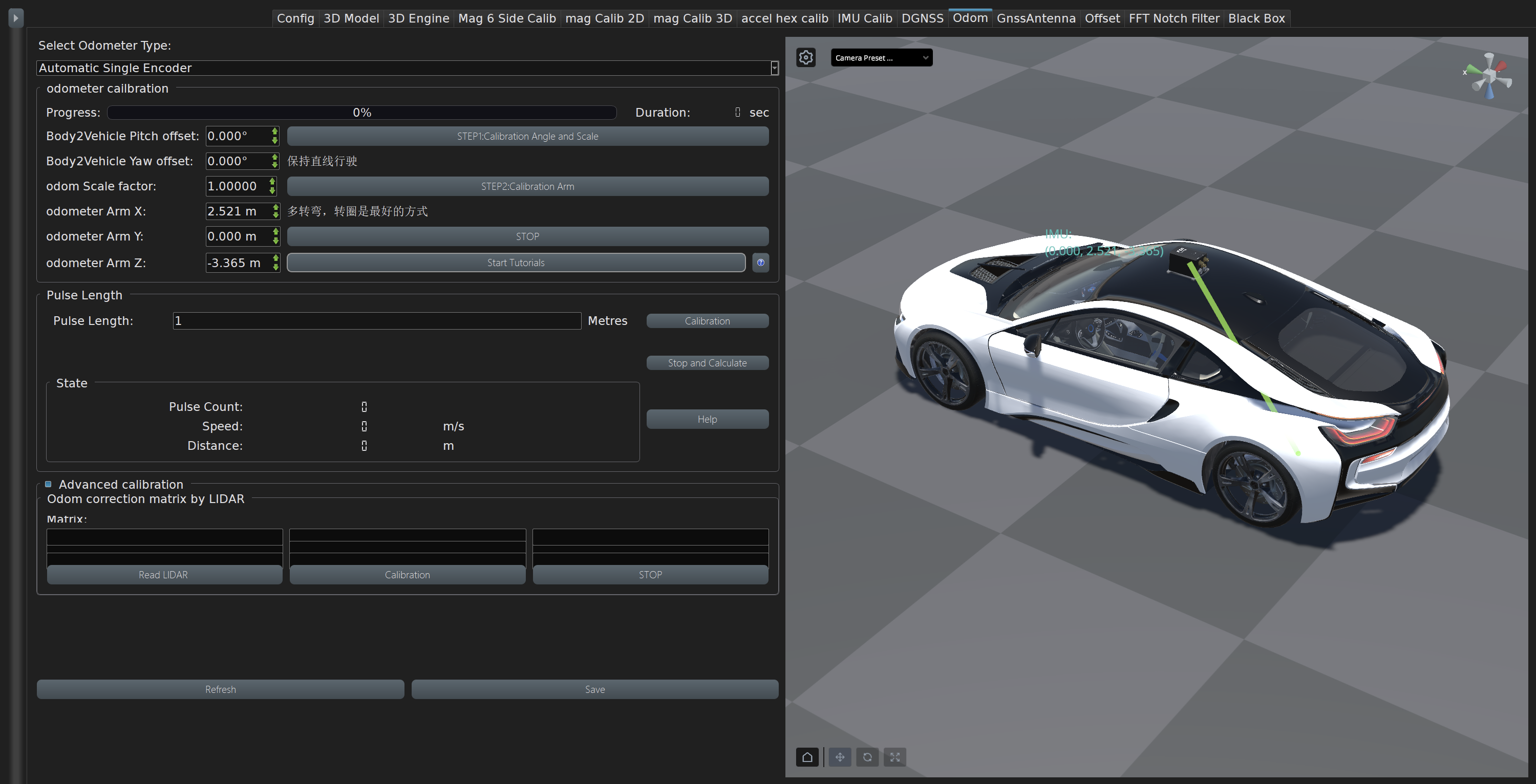
# 方法二: 精准校准工具
该方法同样采用GPS辅助对里程计刻度因子进行校准,GPS定位精度越高,计算出来的里程计刻度因子越准确。该方法是通过模组内单独运行一个滤波系统,对包含里程计刻度因子在内的几个状态进行实时估计,最终完成计算。下面对估计的几个状态进行说明:
Body2Vehicle Pitch offset:惯导模组坐标系到载体坐标系的安装俯仰角;
Body2Vehicle YAW offset:惯导模组坐标系到载体坐标系的安装偏航角;
Odom Scale Factor:里程计刻度因子;
Odometer Arm X(Y,Z):惯导模组在自己坐标系中到里程计中心的X(Y,Z)轴位置,即IMU到ODOM的杆臂。
由于估计的状态有6组,同时对6组状态进行估计是不可观的,因此本滤波方法将状态估计分为两个部分,具体操作步骤如下:
# A. 校准开始
校准前需要将滤波开关AID_ODOMETER_VEL_UPDATE关闭,同时在GPS定位有效的环境下,载体进行充分运动,首先实现GNSS/INS的组合导航,即完成惯导的初始对准过程。
# B.刻度因子估计走直线
点击STEP1按钮,对安装角和里程计刻度因子进行实时估计。要求载体直线运动,在运动过程中用户观察三个状态的实时数据,判断数值已经稳定时点击STEP2按钮结束安装角和里程计刻度因子的估计过程并跳入下一个步骤,此时相关参数会自动保存到flash里。
# C.杆臂估计充分运动
在B步骤中点击STEP2按钮后进入杆臂估计流程。此时B中估计的安装角和里程计刻度因子不再发生变化,要求载体进行充分的运动,比如频繁的加减速与转弯。在运动过程中用户观察三个杆臂状态的实时数据,判断数值已经稳定时点击STOP按钮结束杆臂的估计,此时参数会自动保存到flash里。
# D. 完成保存开启
当里程计校准完成后,在config界面打开滤波开关AID_ODOMETER_VEL_UPDATE,保存并重新上电,此时里程计/惯导组合导航生效。
1.安装角和里程计刻度因子的标定是里程计/惯导组合导航的重要环节,这三个状态在B步骤中可观性很强,收敛速度较快;杆臂可观性较差,可能存在无法收敛的现象,但是其对里程计/惯导组合导航较小,因此C步骤中若杆臂无法收敛,则可以将杆臂手动设置0。
2.当惯导模组水平安装在载体上,且X轴与车头方向基本平行时,采用方法一或者方法二都是可行的;否则必须估计惯导与载体之间的安装角,此时必须采用方法二进行校准。
3.若模块始终安装在载体上的固定位置,则校准只需进行一次即可。或对于使用一定时长的载体,由于轮胎磨损,进行过换胎或者充气的操作后,推荐重新进行一次里程计校准。
← 固件升级 惯导双天线安装与校准说明 →