# 传递对准 用户自定义功能介绍
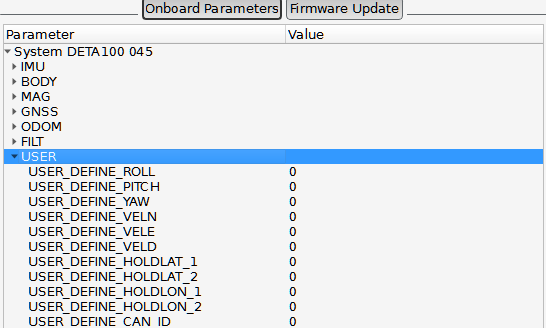
对于部分应用场景,用户能通过其它方式获取到当前模组的准确姿态、速度或者位置信息,则可以将其当做已知量输入给模组,使其在上电后按照用户给定的数据进行初始化。用户自定义的配置功能位于Onboard Parameters界面的USER参数表内,参数默认是0,即用户自定义功能不生效。
下面对其应用进行举例说明:
# 姿态传递对准
- 假使模组安装在一个振动较大的环境中,无法通过内部的加速度计估计出一个良好的横滚和俯仰角初值,而该平台的初始横滚和俯仰角已知,分别为30°和60°,则可以将该值写入到USER_DEFINE_ROLL和USER_DEFINE_PITCH参数内,同时关闭AID界面的加表量测更新开关AID_ACCEL_GRAVITY,最后保存重启生效,如下图所示:

重启后上位机界面显示的姿态角如下图所示,可见俯仰角和横滚角被初始化为设定值:

# 航向传递对准
- 假使模组安装在室内一个磁干扰很大的环境中,无法通过磁力计获取准确的航向角数据,而该初始方位是标定已知的,假定为230°,则可以将该值写入到USER_DEFINE_YAW参数内,同时关闭AID界面的磁2d和磁3D量测更新开关,最后保存重启生效,如下图所示:

重启后上位机界面显示的姿态角如下图所示,可见航向角被初始化为设定值:

# 位置传递对准
- NED坐标系是导航坐标系,需要定义该坐标系的原点才能使用,默认NED坐标系的坐标原点是根据模组内部判断GNSS是否生效自动标定的,当然也支持人工输入,即通过上位机USER界面写入。假定合肥某一位置的经度为117.12345678°,纬度为31.87654321°,将此位置作为 NED 坐标系的原点。注意小数部分必须到小数点后8位,不够的手动补0,8位的小数能保证定位精度到mm。
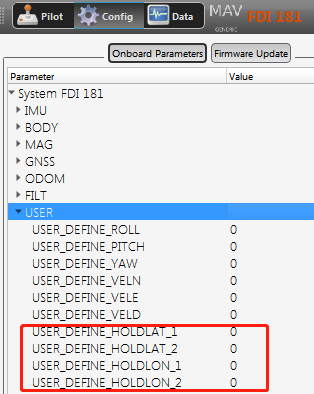
如上图所示, Config 界面内,用户在 Onboard Parameters 列表里 USER 类的红框处输入指定的经纬度值。其中,
USER_DEFINE_HOLDLAT_1输入纬度的整数部分,即31;USER_DEFINE_HOLDLAT_2输入纬度的小数点后8位,即87654321; USER_DEFINE_HOLDLON_1输入经度的整数部分,即117;USER_DEFINE_HOLDLON_2输入经度的小数点后8位,即12345678; 之后点击 Transmit 和 Write Flash 按钮将参数保存,之后点击 Restart 按钮重启,此后每次重新上电写入的参数均生效。如果想恢复自动标定原点的方式只需要将上述4个参数置零即可。