
# 惯导双天线安装与校准说明
本教程适用于FDISYSTEMS旗下所有支持双天线rtk功能的产品。
# 1. 惯导双天线安装说明
FDISYSTEMS 的 DETA40N/100D/Sigma/Epsilon-D/orion-D系列支持双天线定向功能,其优势是在静止或低速环境下获得精准航向角,快速初始化GNSS/INS组合导航航向角。由于双天线航向角定义为移动基站(MB)天线相位中心指向移动站(ROVER)天线相位中心的射线与地理北的夹角(与安装位置相关),因此需规范安装。
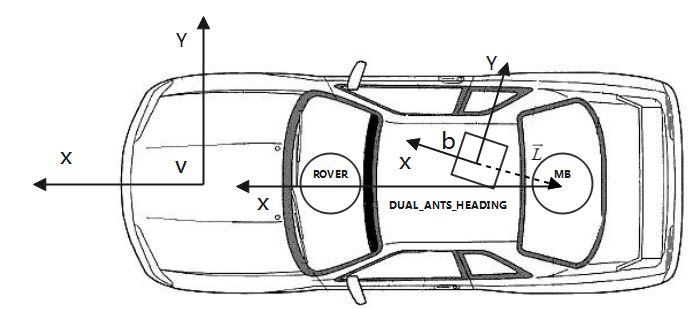
# 坐标系与符号说明:
- v系:载体坐标系(右手系),X轴指向载体前进方向,Y轴朝右,Z轴朝下。
- b系:惯导坐标系(右手系),XYZ轴标识于外壳。
- ROVER:移动站(辅天线)。
- MB:移动基站(主天线)。
- DUAL_ANTS_HEADING:双天线航向角(MB→ROVER射线与地理北夹角,0°-360°)。
- L:惯导模组到MB天线相位中心的杆臂矢量(b系下表示)。建议实测填入参数表,或尽量将惯导与MB安装在一起。
# 2. RBV和双天线安装误差角补偿
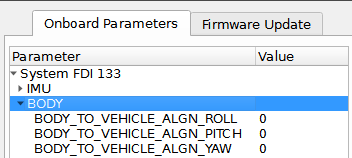
理想情况下,惯导X轴、双天线连线均与载体X轴平行。实际因安装限制,需补偿安装误差角:
- 横滚安装误差角
BODY_TO_VEHICLE_ALGN_ROLL - 俯仰安装误差角
BODY_TO_VEHICLE_ALGN_PITCH - 航向安装误差角
BODY_TO_VEHICLE_ALGN_YAW
# 航向误差角定义:
- 若载体v系X轴顺时针旋转∆ψ后与b系X轴平行 →
BODY_TO_VEHICLE_ALGN_YAW = ∆ψ - 若载体v系X轴逆时针旋转∆ψ后与b系X轴平行 →
BODY_TO_VEHICLE_ALGN_YAW = -∆ψ\
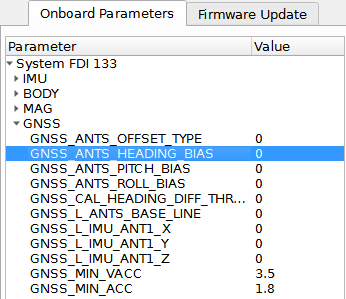
# 双天线航向误差角:
GNSS_ANTS_HEADING_BIAS = 双天线原始航向角 - 载体前进航向角
# 3. 惯导-天线杆臂与惯导-载体杆臂补偿
# 惯导-天线杆臂
FDISYSTEMS 模组使用MB(主天线)的速度与位置作为观测量对惯导进行修正,一般而言主天线与惯导位置不重合,惯导到天线相位中心的矢量称之为 GNSS 杆臂,杆臂会给 GNSS/INS 组合导航带来不好的影响,尤其是在载体存在角速度时(转弯),因此需要对其进行补偿。FDIGroundStation 提供了杆臂值的参数界面,以便您在测量杆臂数据后输入,如下图所示。注意杆臂数据是在惯导模组坐标系中测量得出的(见第5.5节),若天线安装在惯导上方,则Z轴方向的杆臂值为负。
主天线(MB)位置/速度用于修正惯导,惯导到天线相位中心的矢量(GNSS杆臂)需补偿。
在FDIGroundStation输入杆臂值(b系测量):
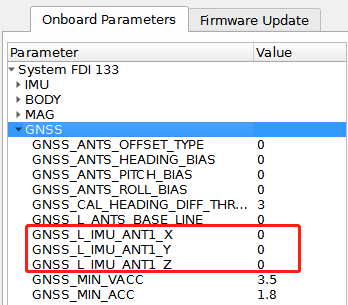 单位m
单位m注:天线在惯导上方时,Z轴杆臂值为负。
# 惯导-载体杆臂
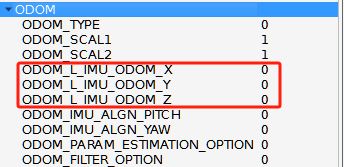
使用 NHC 车辆非完整性约束时,除了RBV需要校准,即将惯导坐标系旋转到载体坐标系,此外还需要测量惯导模组与车辆后轮中心的杆臂,否则在gnss中断的环境下,尤其是转弯的过程中,NHC模型的失准会影响其修正导航数据的效果。惯导-载体杆臂定义为载体左右后轮连线中心在惯导坐标系下的三维位置,FDIGroundStation 提供了该杆臂值的参数配置界面,以便用户在测量杆臂数据后输入,在参数表的 ODOM 一栏内,如下图所示:
- 使用NHC(车辆非完整性约束)时,需测量惯导模组到车辆后轮中心的杆臂(b系三维位置)。
- 参数位置:ODOM栏
 单位m
单位m
# 参数保存
点击 Transmit → Write Flash 保存参数:\
# 4. 惯导双天线自动校准说明
当用户没有测量设备计算上述安装误差角时(杆臂必须手动测量),使用FDIGroundStation的 GNSSAntenna 自带的惯导双天线校准功能进行自动计算(需双天线RTK固定解),该功能在 Config 界面的 GNSSAntenna 中:

(状态需显示绿色 RTK_DUAL)

# 校准步骤:
Step 1:配置确认
DYNAMICS栏选择AUTODRIVER_MODEL
AID配置参考下图(汽车应用推荐配置):
修改后点击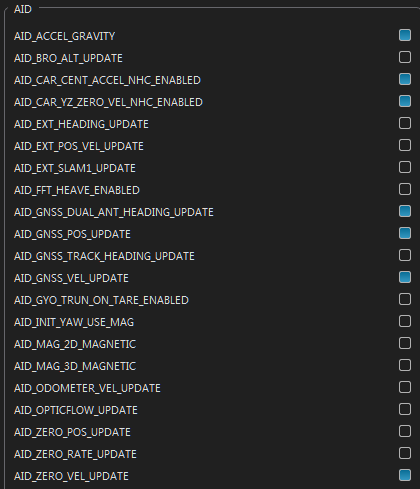
SAVE TO FDI保存。
Step 2:参数预输入
进入 GNSSAntenna 界面:
- 点击
Reflesh刷新 - 输入以下参数(若未填,定义参考如上):
- 惯导-天线杆臂
- 惯导-载体杆臂
- RBV与双天线误差角
注: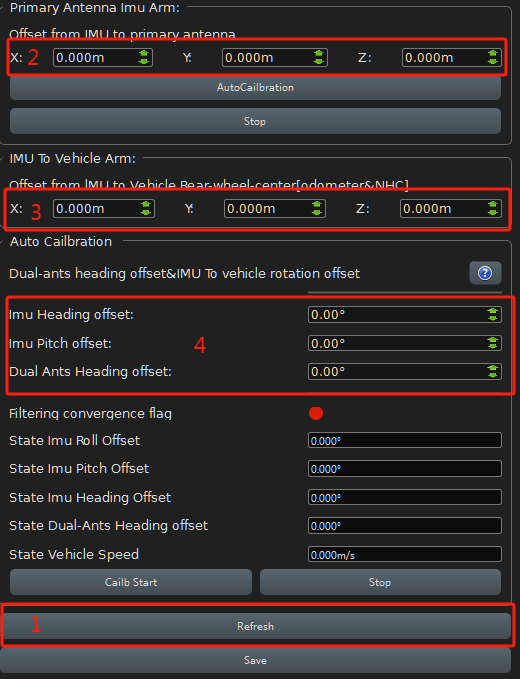
IMU Heading Offset和IMU Pitch Offset填0(惯导水平安装且X轴大致对齐车头)。Dual Ants Heading Offset参考:- MB→ROVER连线与车头一致(MB车尾,ROVER车头)→
0° - MB→ROVER连线向右90° →
90°,向左90° →270° - MB→ROVER连线与车头相反 →
180°
- MB→ROVER连线与车头一致(MB车尾,ROVER车头)→
- 点击
Save→Write Flash→Restart重启。
Step 3:自动校准
- 重启后进入
GNSSAntenna,点击Calib Start(需保持RTK_DUAL状态)。 - 车辆沿“口”或“日”字形道路行驶(含直线与90°弯道),速度 ≥20km/h。
阶段1:滤波收敛
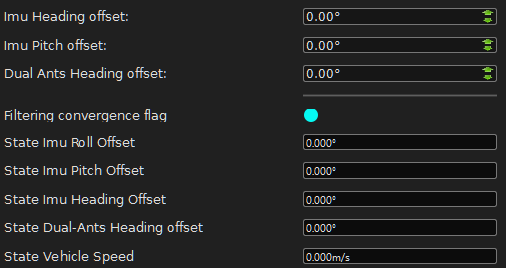
行驶的过程中该模组会实时估计GNSS/INS组合导航的滤波是否收敛,未收敛时下图中的 Filtering convergence flag 为红色,收敛后变为蓝色,通常4个左右的90度转弯就能使滤波收敛(不推荐掉头运动)经历约4个90°弯道后,
Filtering convergence flag由红变蓝:

阶段2:参数估计
在滤波收敛后,模组开始自动实时计算下面几个待估计的状态,其过程发生在车辆沿直线行驶的场景;用户只需要在直线的道路时尽量笔直行驶,转弯道路依旧转弯,是否沿直线行驶由模组内部自动判断,当模组内部计算累计足够时长的直线运动数据后,结果便会显示在上面三个数据框内,同时上位机打印输出 RBV and Dual ANTS Calibration Finished 字样,并自动退出校准,打印输出 Disarmed直线行驶时模组自动计算参数,完成后显示结果并打印
RBV and Dual ANTS Calibration Finished:
 Step 4:保存参数
Step 4:保存参数
点击Write Flash→Restart保存并重启,完成坐标系对齐。\
# 5. 校准总结与建议
FDISYSTEMS 建议用户在安装惯导模块和双天线时,尽量将惯导 X 轴和双天线航向矢量与载体前进方向一致。RBV和双天线安装误差角可以通过光学测量仪器或者 FDIGroundStation 自带的校准功能进行自动计算。
惯导和 gnss 主天线的杆臂是不能忽略的,它在转弯时对gnss/ins组合导航有很大的影响,因此需要准确的测量;RBV校准的作用是将 IMU 坐标系对齐到载体坐标系,和惯导-载体杆臂的测量一样,是为了使 NHC 车辆非完整性约束的模型更加精准,从而使载体在隧道、地下车库等 gnss 中断的环境也能实现较好的导航效果。
# 关键原则:
- 尽量使惯导X轴、双天线连线与载体前进方向一致。
- 杆臂必须手动精确测量(显著影响转弯时GNSS/INS精度)。
- RBV校准与惯导-载体杆臂测量可提升NHC模型精度(增强GNSS中断环境导航能力)。
# 校准精度影响因素:
| 因素 | 影响结果 |
|---|---|
| 惯导-天线杆臂测量精度 | 杆臂越准 → RBV越准 |
| 双天线基线长度 | 基线越长(≥1米)→ 航向误差角越准 |
| 行驶状态 | 速度>20km/h、路面平整、直线笔直 → 精度高 |
| 设备固定 | 模组需螺母固定,远离振动源;天线需稳固无移动 |
| 环境要求 | 开阔天空,双天线保持固定解 |