# 常见问题汇总与解答
问题一:我使用的的硬件平台不支持模块默认的921600波特率,需要将其降低为115200波特率应该怎么操作?
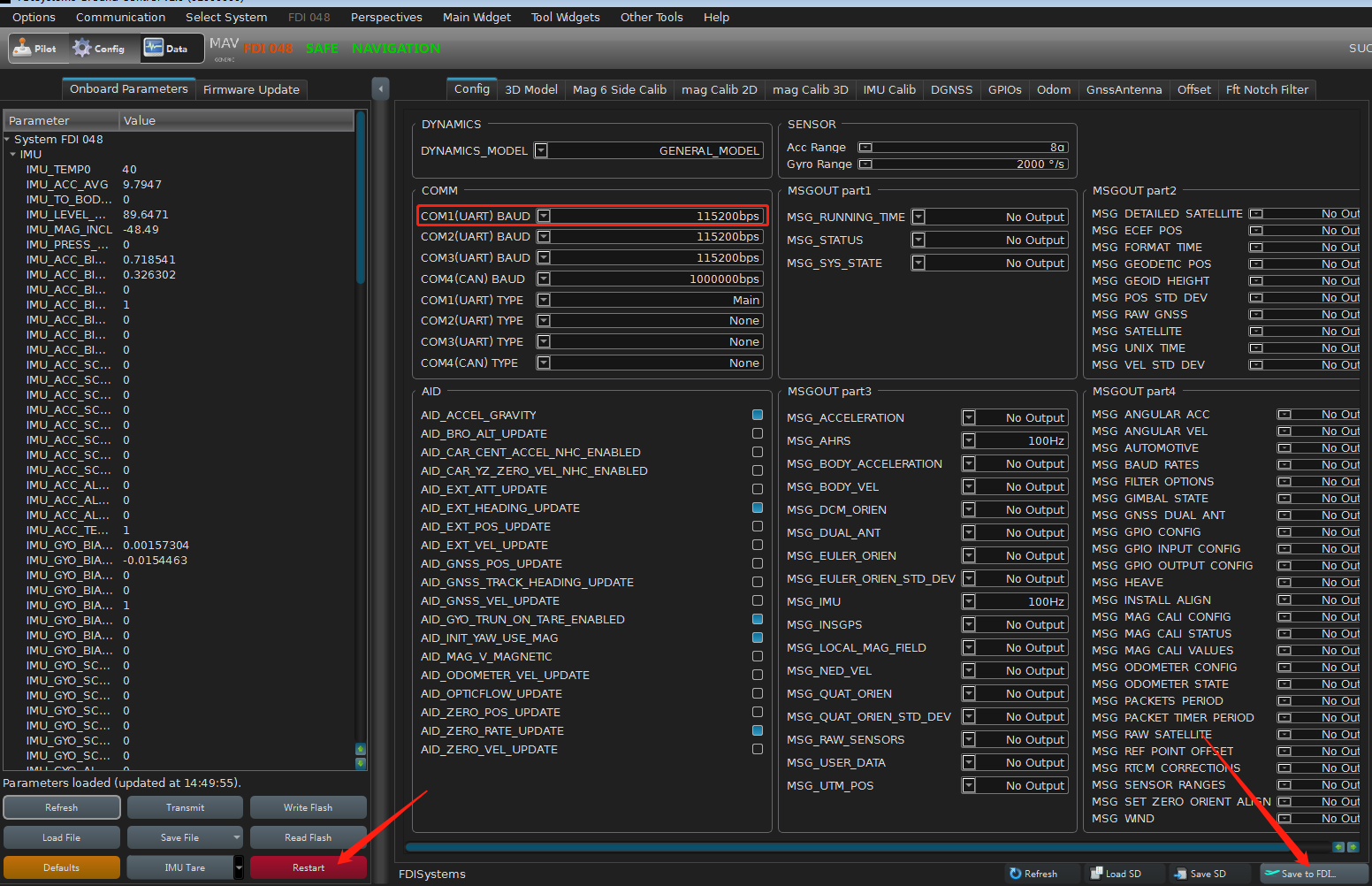
答:连接上位机后,在Config界面将COMM1(UART)BAUD从921600调整为115200,然后点击Save to FDI->Save to Permanent进行保存写入,最后点击Restart按钮重启,选择115200波特率重新连接上位机即可,如下图所示:
也可以使用串口调试助手进行波特率配置,具体步骤为:
1、进入配置模式
#fconfig\r\n
2、查看 端口1的波特率
#fparam get COMM_BAUD1\r\n
3、设置端口1的波特率为115200
#fparam set COMM_BAUD1 5\r\n
4、保存参数
#fsave\r\n
5.重启
#freboot\r\n
y\r\n
** **
问题二:我想修改AHRS数据包的频率为10Hz,而且为什么我接受到的数据包里没有GPS数据类型?
** **
答:修改AHRS数据包的频率在config界面里,截取的一部分如下图所示:
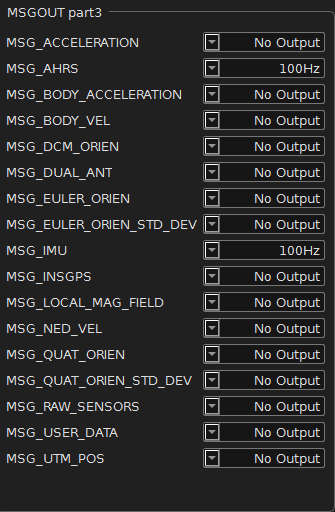
只要将MSG_AHRS的频率修改为10Hz即可,同时记得点击Save to FDI->Save to Permanent进行保存写入;上图所示的No Output说明对应的数据包没有打开,如果需要获取GPS数据类型,则需要将其修改为用户需要的输出频率即可。每个数据包里具体是什么数据类型可以从《FDILINK通讯协议》文档中获得。
问题三:串口调试助手输出打印的16进制数据不再以FC开头并以FD结尾是怎么回事,为什么会出现FC F0?
** **
答:从《FDILINK通讯协议》文档中可知,输出的16进制的数据格式均以FC开头并以FD结尾。如果打印的数据里没有该形式的数据,原因可能为:
1. 波特率设置错误。
2. 连接过上位机后未断电重启则使用串口调试助手读取数据,解决该问题只需要将模块重新上电即可。
需要说明的是,即使没有连接上位机,串口调试助手仍然会输出1Hz的心跳包数据FC F0用于上位机通信,但这不会影响其他数据的发送。
问题四:模块每次上电后姿态一直在漂移是怎么回事,明明模块是静止放置的?
** **
答:该问题的根本原因大概率是模块启动时计算的陀螺仪静态零偏有误,解决方法如下:
1. 确保模块静止的前提下对模块重新上电,观测此时姿态是否仍然在漂移。
2. 如果姿态仍然在漂移,在静止条件下点击Gyro Tare按钮进行陀螺仪静态零偏的重新计算,接着点击write flash按钮写入。该按钮功能说明见[1.2.4 系统重启,调平和参数导入导出](<#_1.2.4 系统重启,调平和参数导入导出>)。
3. 进行完2步骤后姿态仍然在偏移,用户需检查模块附近是否存在变化的磁场(磁力计开关打开时),或者周围温度是否存在剧烈的变化。前者会导致航向角的漂移,后者会导致陀螺仪零偏发生改变,因为温度是导致陀螺仪零偏变化的主要原因。
4. 如果上述步骤操作完后仍然没有解决问题,则联系我们技术人员进行沟通交流。
需要说明的是,FDIGroundStation SPKF融合开关中的AID_GYO_TURN_ON_TARE_ENABLED开关是默认打开的,其功能是上电时自动计算一次陀螺仪静态零偏,需要模块上电时静止放置,如果用户使用环境无法做到静止启动,则关闭该开关,否则上电后姿态可能漂移。
问题五:如何外接GPS数据到模块里,如何获得融合后的经纬度和NED坐标系下的位置速度?
** **
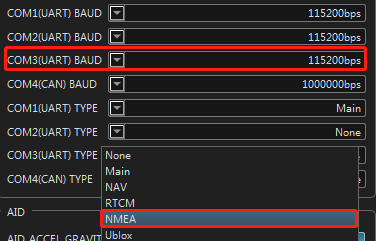
答:DETA10-N系列支持接入GPS数据并进行融合,具体操作为在上位机选择需要输入的COMM口,波特率以及数据格式,如下图所示:选择将GPS数据从COM3输入到模块中,波特率为115200,格式为NMEA 0183,当然如果支持UBLOX格式的话也可以选择Ublox:
然后点击Save to FDI->Save to Permanent进行保存写入,最后点击Restart按钮重新上电即可。
以UBLOX模块为例,硬件接线如下图所示:
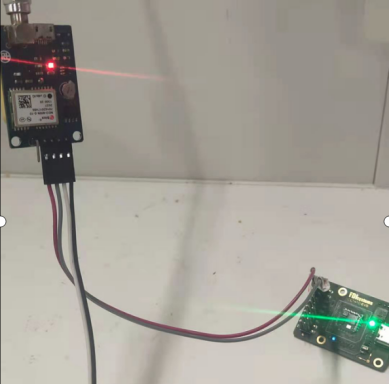
将接收机的TX和RX与DETA10模块的RX3以及TX3连接。如果用户购买的DETA10自带GPS模块,则无需进行硬件接线步骤。
此时可以通过上位机的显示来判断GPS数据是否成功导入模块中,如下图所示:
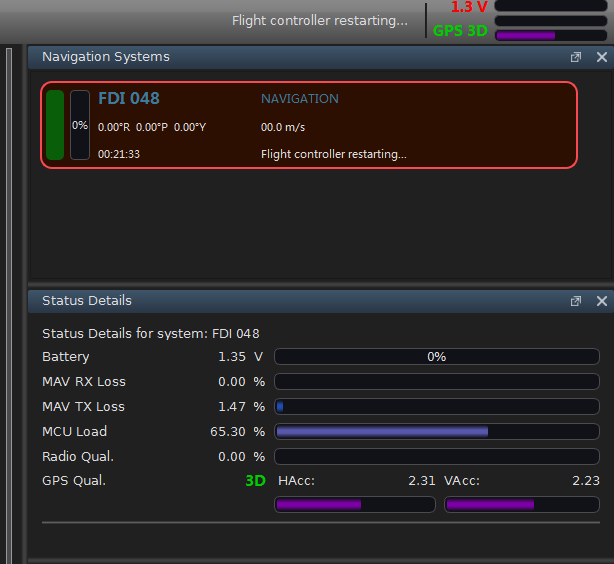
上图显示为GPS 3D模式,此时水平定位精度2.31米,垂直定位精度2.23米。
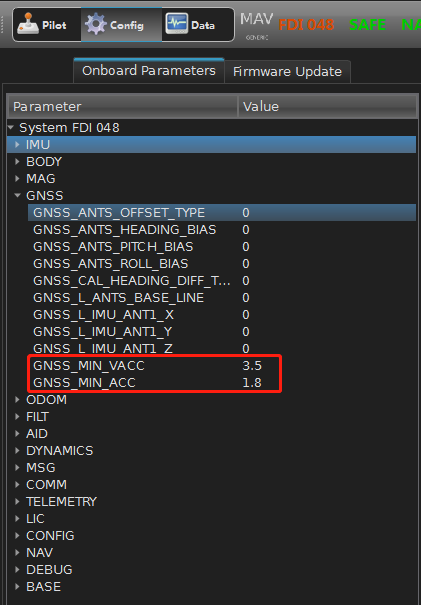
需要说明的是,惯导融合GPS数据的前提是水平和垂直定位精度均达到米级,具体阈值为水平定位精度1.8米,垂直定位精度3.5米,只有实际获得的精度小于上述两个阈值时INS/GPS融合才会生效。该阈值可以在参数表里找到并进行修改,如下图所示。采用阈值的原因是GPS信号太差的话,融合就没有太大的意义,甚至会降低姿态原本的精度。
从《FDILINK通讯协议》文档中可知,INS/GPS数据包(0x42)里有融合后NED坐标系的位置和速度信息,只需到在上位机将其打开即可:

同理大地纬度坐标系下的经纬、高度数据包的ID为0x5C,只需到在上位机将其打开即可:

问题六:曲线坐标系(经度纬度高度)和当地导航坐标系(NED)以及地心地固坐标系(ECEF)的关系是什么?
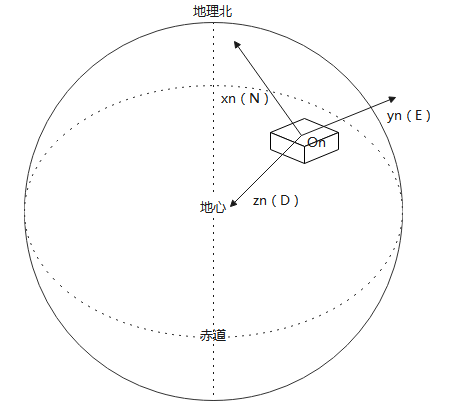
答:NED坐标系也称为北(North)东(East)地(Down)坐标系,一般用符号n表示,NED坐标系各轴的定义:
N——北轴指向地球北;
E——东轴指向地球东;
D——地轴 (opens new window)垂直于地球表面并指向下;
设基准点(第一个定位有效的点)为,所谓定位有效即GNSS水平定位精度和垂直定位精度均小于设定阈值,具体见问题五,一旦满足条件,模块会自动将此基准点保存。基准点对应NED坐标系的原点位置;当前时刻输出的位置为,则该点对应NED坐标系位置为:

表示大地高度,表示子午圈曲率半径,表示卯酉圈曲率半径,表示大地纬度,表示经度,表示地球椭球长半径,表示地球椭球第一偏心率。
 
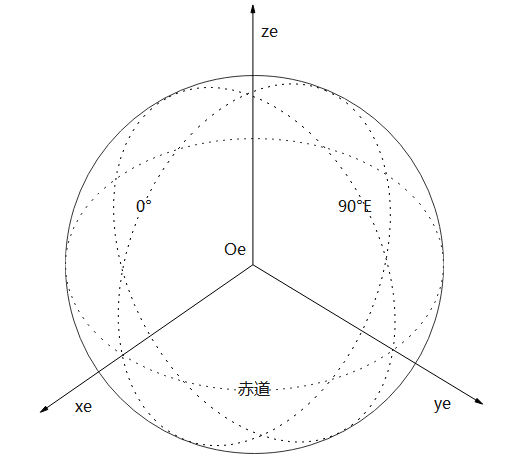
ECEF采用WGS 84标准构建的椭球体模型的中心为原点,如下图所示。z 轴沿着地球自转轴从地心指向北极点;x 轴从地心指向赤道与IERS参考子午线的交点;y 轴从地心指向赤道与90°东经子午线的交点。ECEF用符号 e 表示。
曲线位置到ECEF系笛卡儿位置的转换公式如下:
