# SPKF融合开关说明
Config 界面的 AID 界面配置 SPKF 所使用的融合算法类型:Request Packets
| 开关类型 | 说明 |
|---|---|
| AID_ACCEL_GRAVITY | 加速度计重力辅助融合开关 |
| AID_BRO_ALT_UPDATE | 气压计高度辅助融合开关 |
| AID_CAR_CENT_ACCEL_NHC_ENABLED | 汽车向心加速度补偿开关 |
| AID_CAR_YZ_ZERO_VEL_NHC_ENABLED | 汽车零速更新开关 |
| AID_EXT_HEADING_UPDATE | 外部航向输入开关 |
| AID_EXT_POS_VEL_UPDATE | 外部速度位置输入开关 |
| AID_EXT_SLAM1_UPDATE | 外部slam pva输入开关 |
| AID_GNSS_DUAL_ANT_HEADING_UPDATE | GNSS 双天线定向融合开关 |
| AID_GNSS_POS_UPDATE | GNSS 位置融合开关 |
| AID_GNSS_TRACK_HEADING_UPDATE | GNSS 航迹角融合开关 |
| AID_GNSS_VEL_UPDATE | GNSS 速度融合开关 |
| AID_GYO_TURN_ON_TARE_ENABLED | 开机时静态陀螺零偏估计开关 |
| AID_INIT_YAW_USE_MAG | 磁力计初始化航向角开关 |
| AID_MAG_2D_MAGNETIC | 磁力计2D融合开关 |
| AID_MAG_3D_MAGNETIC | 磁力计3D融合开关 |
| AID_ODOMETER_VEL_UPDATE | 里程计融合开关 |
| AID_OPTICFLOW_UPDATE | 光流计融合开关 |
| AID_ZERO_POS_UPDATE | 零位置更新开关 |
| AID_ZERO_RATE_UPDATE | 零角速度更新开关 |
| AID_ZERO_VEL_UPDATE | 零速度更新开关 |
表 : SPKF融合开关说明
| 开关类型 | 说明 | 描述 |
|---|---|---|
| AID_ACCEL_GRAVITY | 加速度计重力辅助融合开关 | 该配置使用加速度计测量的重力矢量辅助用于稳定横滚角和俯仰角,这是AHRS的原理 |
| AID_BRO_ALT_UPDATE | 气压计高度辅助融合开关 | 使用气压高度计信息来辅助导航的开关 |
| AID_CAR_CENT_ACCEL_NHC_ENABLED | 汽车向心加速度补偿开关 | 汽车向心加速度非完整性约束开关,在前轮导向的汽车应用中,这是一项重要的约束信息,会通过汽车动力学获得额外的性能增强,可以打开,在使用前需要进行IMU安装角的和里程计(即使没有使用)杆臂的校准。不满足的载体模型禁止使用! |
| AID_CAR_YZ_ZERO_VEL_NHC_ENABLED | 汽车零速更新开关 | 汽车载体坐标系YZ轴零速非完整性约束开关,在前轮导向的汽车应用中,这是一项重要的约束信息,会通过汽车动力学获得额外的性能增强,可以打开,在使用前需要进行IMU安装角的和里程计(即使没有使用)杆臂的校准。不满足的载体模型禁止使用! |
| AID_EXT_HEADING_UPDATE | 外部航向输入开关 | 外部航向角辅助信息开关,可以用于其他航向信息源辅助导航或者初始对准。 |
| AID_EXT_POS_VEL_UPDATE | 外部速度位置输入开关 | 外部位置速度辅助信息开关 |
| AID_EXT_SLAM1_UPDATE | 外部slam pva输入开关 | 外部SLAM1辅助开关,位置、速度、航姿角度辅助信息开关 |
| AID_GNSS_DUAL_ANT_HEADING_UPDATE | GNSS双天线定向融合开关 | 允许接入GNSS双天线测向航向融合 |
| AID_GNSS_POS_UPDATE | GNSS 位置融合开关 | 允许外接 GNSS 数据进行速度和位置融合 |
| AID_GNSS_TRACK_HEADING_UPDATE | GNSS 航迹角融合开关 | GNSS卫星导航航迹角辅助开关 |
| AID_GNSS_VEL_UPDATE | GNSS 速度融合开关 | GNSS卫星导航速度辅助开关 |
| AID_GYO_TURN_ON_TARE_ENABLED | 开机时静态陀螺零偏估计开关 | 上电时会自动计算一次陀螺仪静态零偏,需要模块静止放置,如果用户使用环境无法做到静止启动,则关闭该开关; |
| AID_INIT_YAW_USE_MAG | 磁力计初始化航向角开关 | 上电时使用磁力计对航向进行初始化,如果用户需要启动时从零开始的航向角,则关闭该开关; 在有卫星双天线或者其他准确航向信息源的组合导航中,该功能的作用是可以加快速的完成航向角的初始化。 例如在单点定位中,如果初始航向角误差为180度,收敛时间会比较长,通过上电时磁航向初始化会减小航向角的误差,加快完初始对准。 注意:使用磁力计,需要进行磁力计校准 |
| AID_MAG_2D_MAGNETIC | 磁力计2D融合开关 | 磁力计2D实时辅助开关,应用于无法进行磁3D校准的应用,例如平面运动的载体车辆等。使用前需要进行磁2D校准。 如果条件允许,推荐使用更高精度的磁3D辅助。 |
| AID_MAG_3D_MAGNETIC | 磁力计3D融合开关 | 磁力计3D实时辅助开关,例如无人机等。使用前需要进行磁3D校准。 |
| AID_ODOMETER_VEL_UPDATE | 里程计融合开关 | 里程计速度辅助开关,使用前需要校准里程计,杆臂以及刻度因子的估计。 |
| AID_OPTICFLOW_UPDATE | 光流计融合开关 | 光流传感器辅助开关,这是一个增量位置和速度信息源。 |
| AID_ZERO_POS_UPDATE | 零位置更新开关 | 模块判断长时间静止时,停止位置的更新,让位置保持不变。 |
| AID_ZERO_RATE_UPDATE | 零角速度更新开关 | 模块判断静止时计算陀螺仪动态零偏。需要注意设置合理的阈值,可能导致错误地估计陀螺仪零偏。 |
| AID_ZERO_VEL_UPDATE | 零速度更新开关 | 模块判断静止时,将NED速度拉到零。用于减少导航误差。 |
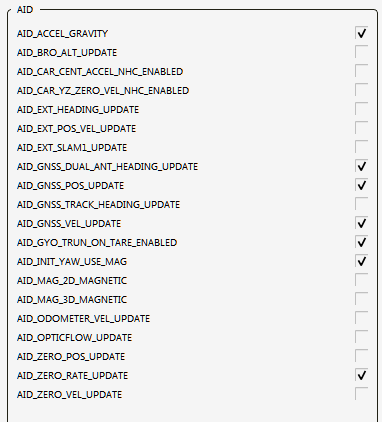
默认的6轴融合配置如下:
# AID_ACCEL_GRAVITY
该配置使用加速度计测量的重力矢量辅助用于稳定横滚角和俯仰角,这是AHRS的原理;
# AID_BRO_ALT_UPDATE
使用气压高度计信息来辅助导航的开关
AID_GNSS_POS_UPDATE,AID_GNSS_VEL_UPDATE:允许外接 GNSS 数据进行速度和位置融合;
# AID_CAR_CENT_ACCEL_NHC_ENABLED
汽车向心加速度非完整性约束开关,在前轮导向的汽车应用中,这是一项重要的约束信息,会通过汽车动力学获得额外的性能增强,可以打开,在使用前需要进行IMU安装角的和里程计(即使没有使用)杆臂的校准。不满足的载体模型禁止使用!
# AID_CAR_YZ_ZERO_VEL_NHC_ENABLED
汽车载体坐标系YZ轴零速非完整性约束开关,在前轮导向的汽车应用中,这是一项重要的约束信息,会通过汽车动力学获得额外的性能增强,可以打开,在使用前需要进行IMU安装角的和里程计(即使没有使用)杆臂的校准。不满足的载体模型禁止使用!
# AID_EXT_HEADING_UPDATE
外部航向角辅助信息开关,可以用于其他航向信息源辅助导航或者初始对准。
# AID_EXT_POS_VEL_UPDATE
外部位置速度辅助信息开关。
# AID_EXT_SLAM1_UPDATE
外部SLAM1辅助开关,位置、速度、航姿角度辅助信息开关。
# AID_GNSS_POS_UPDATE
GNSS卫星导航位置辅助开关
# AID_GNSS_TRACK_HEADING_UPDATE
GNSS卫星导航航迹角辅助开关
# AID_GNSS_VEL_UPDATE
GNSS卫星导航速度辅助开关
# AID_GYO_TURN_ON_TARE_ENABLED
上电时会自动计算一次陀螺仪静态零偏,需要模块静止放置,如果用户使用环境无法做到静止启动,则关闭该开关;
# AID_INIT_YAW_USE_MAG:
上电时使用磁力计对航向进行初始化,如果用户需要启动时从零开始的航向角,则关闭该开关; 在有卫星双天线或者其他准确航向信息源的组合导航中,该功能的作用是可以加快速的完成航向角的初始化。 例如在单点定位中,如果初始航向角误差为180度,收敛时间会比较长,通过上电时磁航向初始化会减小航向角的误差,加快完初始对准。 注意:使用磁力计,需要进行磁力计校准
# AID_MAG_2D_MAGNETIC
磁力计2D实时辅助开关,应用于无法进行磁3D校准的应用,例如平面运动的载体车辆等。使用前需要进行磁2D校准。 如果条件允许,推荐使用更高精度的磁3D辅助。
# AID_MAG_3D_MAGNETIC
磁力计3D实时辅助开关,例如无人机等。使用前需要进行磁3D校准。
# AID_ODOMETER_VEL_UPDATE
里程计速度辅助开关,使用前需要校准里程计,杆臂以及刻度因子的估计。
# AID_OPTICFLOW_UPDATE
光流传感器辅助开关,这是一个增量位置和速度信息源。
# AID_ZERO_POS_UPDATE
模块判断长时间静止时,停止位置的更新,让位置保持不变。
### AID_ZERO_RATE_UPDATE 模块判断静止时计算陀螺仪动态零偏。需要注意设置合理的阈值,可能导致错误地估计陀螺仪零偏。
# AID_ZERO_VEL_UPDATE
模块判断静止时,将NED速度拉到零。用于减少导航误差。
# Aid Mag 3D Magnetic
- 下图是 9 轴融合配置,相比 6 轴融合配置,增加了 AID_MAG_3D_MAGNETIC 磁力计融合开关(AID_MAG_2D_MAGNETIC也可以开启,二者任选其一,两者融合的算法不同,但都是使用磁力计进行航向融合)。注意在打开此开关前,需要对磁力计进行软磁和硬磁校准,具体见第10.7节。
如果用户使用环境存在较大的磁干扰,该场景下 AID_MAG_3D_MAGNETIC 的开启可能会导致错误的航向角估计。通过 Data 界面 IMU 数据表的 IMU.MAG Magnitude 数据可以观察是否存在磁干扰:磁场稳定时该值基本稳定在当地磁场强度大小(约为 0.5 高斯)附近。
- 在接入 GNSS 数据的情况下(内置或者外接),可以不使用磁力计获得绝对的航向数据,共有三种方式:
1. GNSS 组合导航:AID 界面配置同 6 轴融合配置,上电时使用磁力计对航向进行初始化,然后通过 GNSS 速度融合和位置融合对航向进行修正,当进行频繁且显着的加速(例如转弯)时,系统输出航向会慢慢收敛到真实航向。
2. GNSS 速度航向:AID 界面配置开关为 AID_GNSS_TRACK_HEADING_UPDATE,即使用 GNSS 航迹角进行融合。该模式意味着具有一定的速度(大于2m/s)便能获得航向估计。速度越快,航向精度越高。它还要求载体前进时没有任何侧滑。例如,如果飞机由于侧风而漂移,则在飞机上使用 GNSS 航迹角会导致错误的航向。
3. GNSS 双天线航向融合:DETA100系列 和 EPSILON系列 有该配置选项,对应的开关为AID_GNSS_DUAL_ANT_HEADING_UPDATE。GNSS双天线航向是通过在同一模组上使用两个天线来实现的。该方法使用两个 GNSS 天线来提供有效的真实航向角,即使在静止时也是如此。双天线基线矢量越长,双天线航向角的精度越高,但是它比单天线系统对 GNSS 信号的接收条件更敏感,它应该在开阔的天空条件下运行。
1.3 FDIGroundStation SPKF融合开关说明
正如1.2.2.2节所描述的**,Config界面的AID界面配置SPKF**所使用的融合算法类型:
| 开关类型 | 说明 |
|---|---|
| AID_ACCEL_GRAVITY | 加速度计融合开关 |
| AID_BRO_ALT_UPDATE | 气压计融合开关 |
| AID_CAR_CENT_ACCEL_NHC_ENABLED | 汽车向心加速度补偿开关 |
| AID_CAR_YZ_ZERO_VEL_NHC_ENABLED | 汽车零速更新开关 |
| AID_EXT_HEADING_UPDATE | 外部航向输入开关 |
| AID_GNSS_POS_UPDATE | GNSS位置融合开关 |
| AID_GNSS_TRACK_HEADING_UPDATE | GNSS航迹角融合开关 |
| AID_GNSS_VEL_UPDATE | GNSS速度融合开关 |
| AID_GYO_TURN_ON_TARE_ENABLED | 开机时静态陀螺零偏估计开关 |
| AID_INIT_YAW_USE_MAG | 磁力计初始化航向角开关 |
| AID_MAG_V_MAGNETIC | 磁力计融合开关 |
| AID_ODOMETER_VEL_UPDATE | 里程计融合开关 |
| AID_OPTICFLOW_UPDATE | 光流计融合开关 |
| AID_ZERO_POS_UPDATE | 零位置更新开关 |
| AID_ZERO_RATE_UPDATE | 零角速度更新开关 |
| AID_ZERO_VEL_UPDATE | 零速度更新开关 |
** **
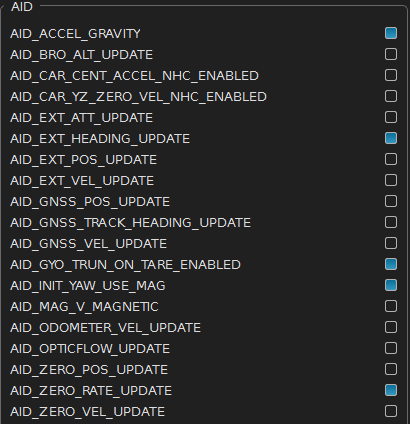
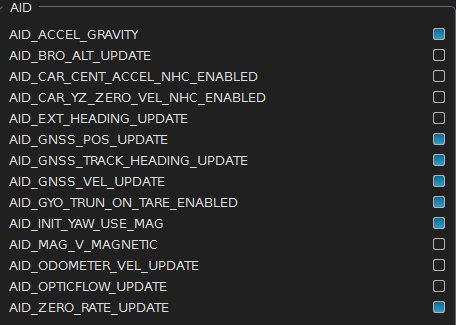
FDIsystem默认给用户设置的配置如下:
这是6轴融合配置:
l AID_ACCEL_GRAVITY:该配置使用加速度计融合从而稳定横滚角和俯仰角;
l AID_GNSS_POS_UPDATE,AID_GNSS_VEL_UPDATE:允许外接GNSS数据进行速度和位置融合;
l AID_GYO_TURN_ON_TARE_ENABLED:上电时会自动计算一次陀螺仪静态零偏,需要模块静止放置,如果用户使用环境无法做到静止启动,则关闭该开关;
l AID_INIT_YAW_USE_MAG:上电时使用磁力计对航向进行初始化,如果用户需要启动时从零开始的航向角,则关闭该开关;
l **AID_ZERO_RATE_UPDATE:**模块判断静止时计算陀螺仪动态零偏。需要注意以下情况可能导致错误地估计陀螺仪动态零偏:模块旋转角速度低于0.5°/s。
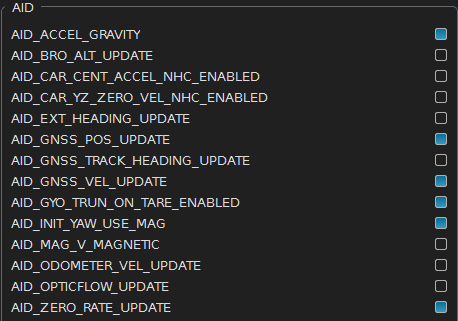
如果用户需要绝对的航向角数据,那么默认的配置如下:
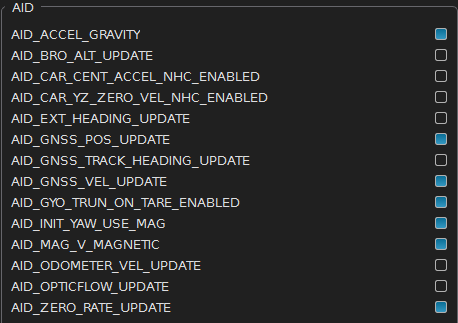
这是9轴融合配置,相比6轴融合配置,增加了AID_MAG_V_MAGNETIC磁力计融合开关。注意在打开此开关前,需要对磁力计进行软磁和硬磁校准,具体见[1.4 FDIGroundStation 磁力计校准说明](<#_1.4 FDIGroundStation 磁力计校准说明>)。
如果用户使用环境存在较大的磁干扰,该场景下AID_MAG_V_MAGNETIC的开启可能会导致错误的航向角估计。通过Data界面IMU数据表的IMU.MAG Magnitude数据可以观察是否存在磁干扰:磁场稳定时该值基本稳定在当地磁场强度大小(约为0.5高斯)附近。
在外接GNSS数据的情况下,可以不使用磁力计获得绝对的航向数据:
- GNSS组合导航:AID界面配置同6轴融合配置,上电时使用磁力计对航向进行初始化,然后通过GNSS速度融合和位置融合对航向进行修正,当进行频繁且显着的加速(例如转弯)时,可以很好地观察到航向。
- GNSS航迹角融合:AID界面配置如下,打开使用GNSS航迹角进行融合。该模式意味着具有一定的速度便能获得航向估计。 它还要求车辆前进,没有任何侧滑。 例如,如果飞机由于侧风而漂移,则在飞机上使用 GNSS航迹角会导致错误的航向。 建议将该模式用于汽车应用。
- GNSS双天线航向融合:DETA-系列没有该配置选项。GNSS真航向是通过在同一GNSS接收器上使用两个天线来实现的。 该方法使用两个 GNSS天线来提供有效的真实航向角,即使在静止时也是如此。双天线基线矢量越长,双天线航向角的精度越高,但是它比单天线系统对GNSS信号的接收条件更敏感,它应该在开阔的天空条件下运行。