# 坐标系转换 安装旋转角说明
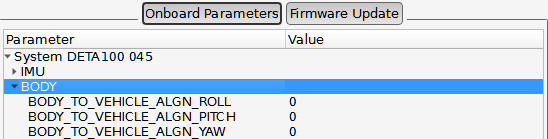
部分情况下,用户无法按照指定的方式安装模组,导致模组的坐标系和用户需要的坐标系方向不一致,此时可以通过配置Onboard Parameters界面BODY参数表里的ROLL、PITCH、YAW进行坐标系转换,如下图所示,旋转顺序为ROLL->PITCH->YAW,即横滚到俯仰到偏航,且旋转角是相对北东地(NED)定义的。旋转方向以北东地(NED)为基准,根据右手定则确定将模组坐标系旋转到用户定义的坐标系下,下面是详细说明:
FDISYSTEMS系列产品默认的坐标系与外壳标注一致,x轴朝前,y轴朝右,z轴朝下;以车载安装为例,最常见的安装方向为模组水平安装,x轴与车载前进方向一致,y轴水平朝右,z轴垂直载体向下。
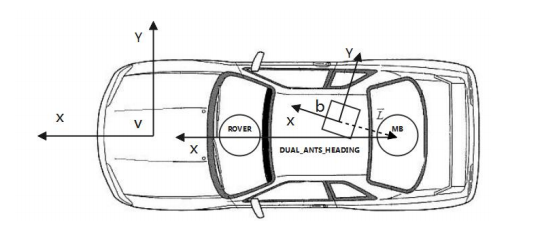
以上图为例,假定载体坐标系V系和模组坐标系b系的夹角为30°,载体坐标系在NED下沿z轴正方向旋转30°与模组坐标系重合,即偏航角为30°,于是BODY_TO_VEHICLE_ALGN_YAW改成30°,保存重启即可,如下图所示

假定另一个场景,模组与车载垂直安装,即模组x轴朝上(天),y轴朝右,z轴朝前与车载前进方向一致。此时车载坐标系在全球坐标系下沿y轴正方向旋转90°与模组坐标系重合,即俯仰角为90°,于是BODY_TO_VEHICLE_ALGN_PICTH改为90°,保存重启即可,如下图所示:

再假定一个场景,模组与车载垂直安装,x轴朝右(与车载y轴平行),y轴朝下指向地心,z轴朝前与车载前进方向一致。由于旋转顺序为横滚到俯仰到偏航,于是车载坐标系在全球坐标系下沿x轴正方向旋转90°,再沿z轴正方向旋转90°与模组坐标系重合,即横滚角为90°,偏航角为90°,于是BODY_TO_VEHICLE_ALGN_ROLL和BODY_TO_VEHICLE_ALGN_YAW改为90°,保存重启即可,如下图所示:

需要说明的是,虽然可以通过旋转将模组默认的NED坐标系旋转到ENU坐标系,但是欧拉角的定义仍然是在NED坐标系下的,究其原因,是因为NED坐标系的旋转顺序为ZYX,ENU坐标系的旋转顺序为ZXY,它们对于欧拉角的定义不一样,上述坐标系转换的功能并不能修改NED坐标系下的欧拉角定义规则。