
# Real time vs Post-Processed Operation
# Real time operation
Real time navigation systems employ "causal" filters. This mean that the navigation filter can only rely on past and present measurement to compute navigation outputs.
It is then obvious that during a travel in a tunnel, where the GNSS is not available, the position drift will gradually increase until we reach the end of the tunnel with maximal error, and then new GNSS position can correct position drift.
# Forward Backward Merge Processing
Now, consider that the processing can be performed after the mission. This is often the case in survey applications. All the measurements are available at the same time, and it becomes also possible to run the navigation algorithms starting from the end of the mission, and moving backward in time toward the very first sensor sample.
In the theory of information, the forward pass (similar to real time operation) and backward pass are considered as independent, because at a given epoch, both passes were computed using a completely different set of information.
It becomes then possible to "merge" those two independent processing to form a new output, with a better accuracy than the best of both passes!
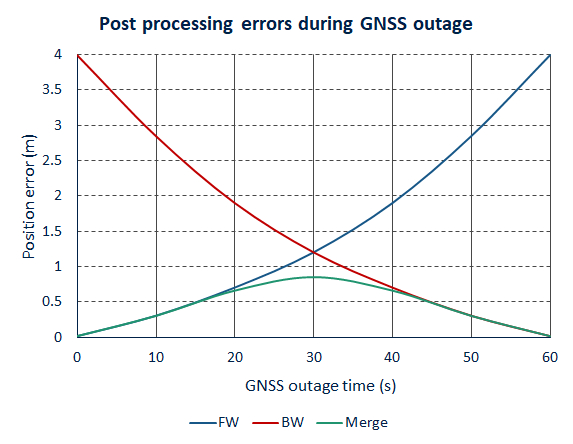
The example below shows how the position error evolves when traveling in a tunnel during 60s. We can see that the error of the position in forward processing grows exponentially until the GNSS is back after 60s. The same can be seen in the backward data where we lose the GNSS at 60 seconds, and the error grows exponentially until the GNSS is back at the 0 seconds mark. When we merge and smooth this data our error is decreased significantly, with the highest error value being in the middle of the GNSS outage.
This of course improves greatly performances during GNSS outages, but it also helps with overall performances. It will also improve heading performancesin low dynamics applications with a single antenna GNSS receiver for example as the Extended Kalman filter doesn't have to rely as much on predictions since the full history is known for the whole file.
# Removes the need of having a base station + communication link
Another advantage of using post-processing is that it is possible to import a base station as long as the Raw GNSS data was logged in real-time. This means that in real-time it is not necessary anymore to have a GNSS base station used, that will save time and money to the user as he won't need to install a base station and a radio link between the base station and the rover. There is also no need to use a NTRIP link in real-time, so no Internet connection or computer running an NTRIP client software are needed anymore.