
# 惯性导航系统 (INS)
# Principle
惯性导航系统 (INS) 是一种依靠陀螺仪和加速度计三元组来计算 6 自由度导航输出(方向、速度和位置)的设备。
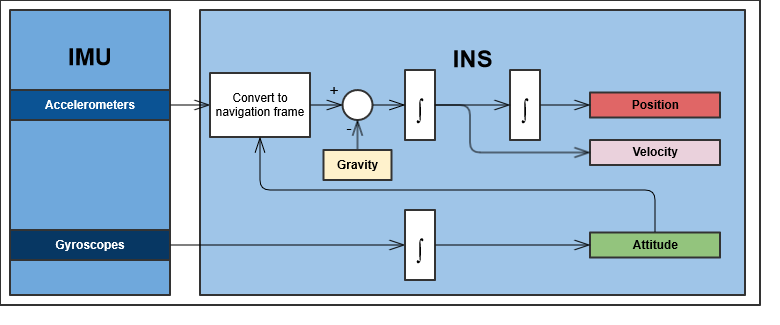
INS对于短期导航非常有效。随着传感器的集成,残余误差往往会增加。因此,必须定期对INS输出进行更正,以保持合理的错误。
# GNSS 辅助 INS
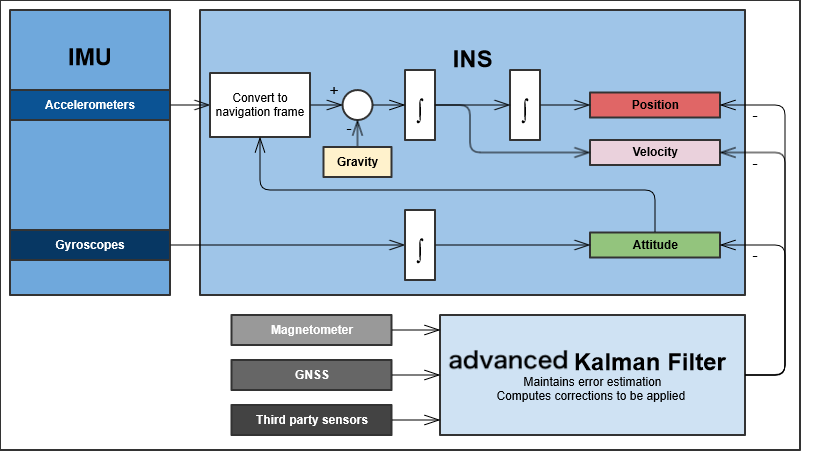
为了实现这些定期校正,将 GNSS 接收器与惯性传感器数据融合起来非常方便:在这种情况下,GNSS 短期误差由惯性传感器有效校正,惯性漂移由GNSS校正。进行这种传感器融合的常见方法是使用扩展卡尔曼滤波器(EKF)。 EKF 的主要优点是它跟踪导航状态,但也考虑传感器偏差,并计算不确定性的估计,为用户提供有关系统性能的关键信息。
其他外部辅助传感器(例如磁力计、里程计或双天线 GNSS 航向传感器)也可以补充系统,以进一步提高性能。
与独立 GNSS 或 AHRS 系统相比,INS 的主要优点是提供高速定向和导航输出,以及在所有动态条件下提供高精度解决方案。 INS 还能够在不依赖磁场的情况下估计准确的航向。
另一方面,INS 的设置有点复杂,因为需要了解机械安装(GNSS 天线杠杆臂等),尽管可以通过自动校准程序来减轻这种复杂性。
# 松 vs 松耦合组合INS
耦合惯性传感器和GNSS技术时存在各种集成方案。
最常用的是松耦合和紧密耦合的集成。我们将在这里描述它们的工作原理,并了解每种方案的优缺点。
在这两种情况下,我们都使用INS来计算短期导航方程并提供准确的导航输出。
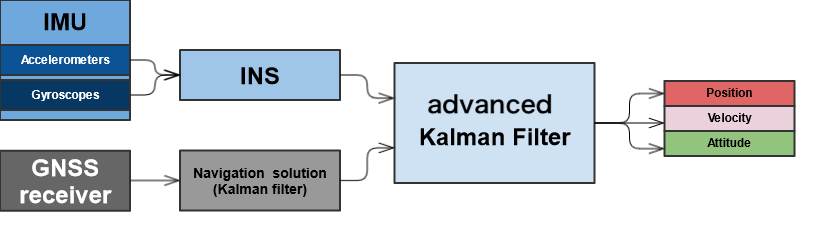
# 松耦合组合
在松散耦合方案中,INS直接与GNSS导航输出(位置,速度)融合,通常使用扩展卡尔曼拟合器。
INS 集成误差由 GNSS 位置输入进行校正。然后由 EKF 提供准确稳定的导航输出。
该方案在简单性方面具有主要优势,可以在微型设备上操作,计算能力有限。它也是与外部接收器(如SAASM(军用)或使用标准NMEA协议的第三方设备集成的最佳解决方案。
但是,重要的是要了解GNSS接收器还需要运行一些内部滤波算法(通常是卡尔曼滤波器)来计算其导航解决方案。当仅使用来自接收器的位置输入时,我们将丢失有关视图中实际GNSS卫星的一些信息。这就是为什么这种解决方案更依赖于良好的GNSS信号处理。
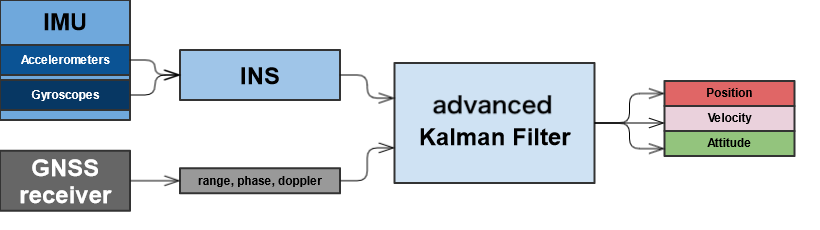
# 紧耦合组合
紧密耦合的 INS/GNSS 是一种更先进的设备。在此方案中,GNSS 接收器仅计算“原始测量值”,给出相对于视野中的每颗卫星的各种位置测量值。 GNSS 接收器不运行任何导航过滤器。所有 GNSS 方程都直接集成到 INS/GNSS 扩展卡尔曼滤波器中。
这种类型的集成具有很大的优势,可以提供更广泛的能力来识别单个卫星的错误测量,或者可以暂时在视野中有限数量的卫星(<4)下运行。与松散耦合的集成相比,这为紧密耦合的解决方案提供了出色的鲁棒性。
在高精度应用 (RTK) 中,紧密耦合还可以提高厘米级精度的可用性,并在中断后实现更快的 RTK 修复恢复。
紧耦合的主要限制是它不容易与通常不提供原始测量的外部 GNSS 接收器兼容。
FDISYSTEMS开发了紧耦合和rtk组合方案,可以保证可靠的同时保证精度。
← 姿态和航向参考系统 (AHRS) GNSS →