
# 船舶运动测量
# 实时船舶运动
除 EKF 外,FDISYSTEMS 惯性传感器还以 50Hz 的加速度计双积分计算船舶运动数据。由于这种双重积分会因方向误差或传感器偏置而产生漂移,因此获得稳定输出的最佳方法是使用高通滤波器设计,该设计将去除运动中的任何常量组件。
此外,自动滤波器调整可确保在长达 25 秒的膨胀周期内获得正确的行为。
由于采用高通滤波器设计,在静态条件下,升沉、浪涌和摇摆数据将始终归零。
如果执行了一个步骤,升沉输出将显示该步骤,然后平滑地返回到零。步骤后,输出可能需要几分钟才能稳定下来。
# Swell 模式
在高性能产品上,可以根据海况启用膨胀模式,以优化升沉Heave算法性能。该模式以智能方式将GNSS信息与加速度计融合在一起,以限制升沉算法固有的相位和幅度误差。这种模式在较高振幅的膨胀条件下特别有效。
系统根据海况自动确定最佳升沉计算模式。
# Delayed Heave
延迟升沉Delayed heave算法可用于更高等级的单位(例如Epsilon),利用过去的测量值来大大提高升沉性能。在实时升沉操作中观察到的常见相位误差可无缝校正,滤波器将在长膨胀周期条件下提供更好的性能。
延迟升沉算法的固定延迟为 150 秒。输出消息的格式与实时飞船运动模式相同,时间戳可用于正确确定飞船运动数据的日期。
该算法非常适合不需要严格实时操作的应用程序,例如海底测绘。实时升沉操作仍然可用,以便在延迟升沉数据可用之前获得第一个升沉估计。
由于延迟升沉是一种延迟算法,因此该装置必须在执行实际测量路径之前至少 5 分钟和在执行实际测量路径后 3 分钟保持正常运行条件下的开启状态,以实现完整的数据采集。
在此延迟升沉输出中仅提供垂直船舶运动(升沉)。此操作模式下不提供浪涌和摇摆。
# 旋转中心 和 Deported Heave 操作
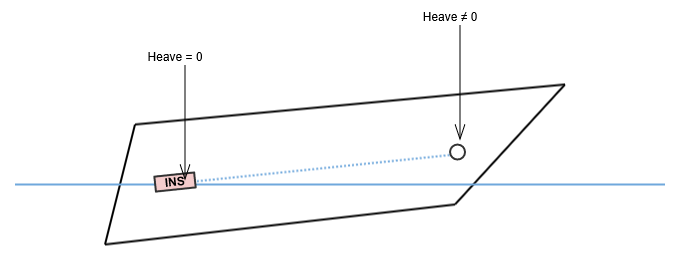
在分析升沉运动时,我们可以发现部分升沉运动是由于船体旋转引起的。 此部分因位置而异,并在旋转中心处消失。另一部分以恒定的方式影响整个船体。 下图显示了旋转在船上不同位置引起的升沉的影响:
为了优化升沉性能,运动传感器放置建议可能会根据船舶或安装类型的不同而有所不同。
对于较小的测量船,将传感器直接放置在感兴趣的点将确保最佳性能(例如直接安装在 MBES 声纳的顶部):该位置将确保通过计算远程升沉和小中心不会增加额外的噪声旋转到传感器偏移不会产生重大误差。此设置对任何 IMU 未对准或杠杆臂残差也最不敏感。
对于较大的船舶,旋转中心到兴趣点杠杆臂(例如超过 10m),我们建议将 IMU 放置在更靠近船舶旋转中心的位置,以最大限度地减少由于长期横摇或俯仰偏移而导致的恒值误差。
在这种情况下,正确设置 IMU 安装对准角misalignments以消除升沉输出上的任何恒定偏移非常重要。
在任何情况下,都可以在船舶内的多个感兴趣点(例如声纳头)设置升沉输出。
当船静止时,IMU与船的不对中misalignments应通过机械设计或软件配置精确考虑,以便在次级点上提供一致的升沉值。
# 升沉Heave增强高度
在海洋测量行业中,经常存在使用升沉输出还是卡尔曼滤波高度输出的问题。在 GNSS 条件良好的情况下,RTK 高度可以非常精确,并且简化了设置,因为测量员无需费心进行潮汐补偿。然而,即使与惯性传感器融合,在桥梁过桥等困难的 GNSS 环境下,RTK 高度也可能会受到干扰。
另一方面,升沉算法允许精确的相对测量,在困难的 GNSS 条件下不会出现特定误差。然而,由于需要潮汐补偿,其使用起来更加复杂。增强型高度模式算法通过将升沉输出与 RTK 高度相结合,充分利用了这两个领域的优点,在良好和具有挑战性的 GNSS 条件下提供准确和绝对的高度测量。
该算法只能与海洋运动轮廓一起使用,并与具有固定载体模糊度的 RTK 或 PPP 等精确位置结合使用。如果需要,可以禁用此增强海拔模式。