# GNSS辅助惯性导航系统(GNSS/INS)
全球导航卫星系统 (GNSS) 是一种卫星配置或星座,它向 GNSS 接收器提供卫星信号,可用于计算位置、速度和时间。惯性导航系统(INS)使用由微机电系统(MEMS)惯性传感器组成的惯性测量单元(IMU)来测量系统的角速率和加速度。可以使用先进的卡尔曼滤波估计技术将这两个系统的测量结果组合起来,形成 GNSS 辅助 INS 系统 (GNSS/INS)。该组合系统能够提供比独立 GNSS 或 INS 系统更高精度的位置、速度和姿态估计,并且具有更好的动态性能。
# 系统贡献
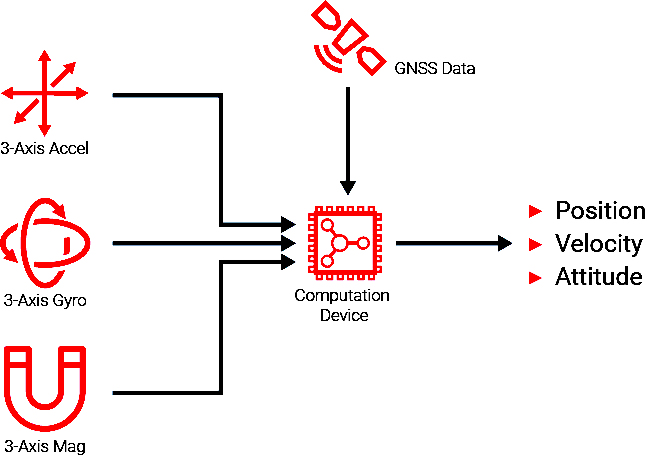
GNSS/INS 系统通常包括 3 轴陀螺仪、3 轴加速度计、GNSS 接收器,有时还包括 3 轴磁力计,以估计导航解决方案。这些传感器中的每一个都为 GNSS/INS 系统提供不同的测量结果。
# 陀螺仪和磁力计
陀螺仪和磁力计都为 GNSS/INS 系统提供了与 AHRS 相同的贡献。陀螺仪角速率测量集成用于高更新率姿态解决方案,而磁力计(如果使用)提供类似于磁罗盘的航向参考。
# 加速度计
GNSS/INS 系统中的加速度计可测量系统由于运动而产生的线性加速度以及由重力引起的伪加速度。为了获得系统因运动而产生的线性加速度,必须使用系统姿态的估计从加速度计测量中减去重力引起的伪加速度。然后可以对所得的线性加速度测量值积分一次以获得系统的速度,并积分两次以获得系统的位置。然而,这些计算在很大程度上依赖于 INS 保持准确的姿态估计,因为姿态的任何误差都会导致计算的加速度出现误差,从而导致积分位置和速度的误差。
# 全球导航卫星系统接收器
GNSS 接收器使用 GNSS 卫星发送的导航消息并跟踪伪距和多普勒原始可观测测量结果,为 GNSS/INS 系统提供接收器的位置、速度和时间 (PVT)。这种无漂移 PVT 解决方案用于稳定加速度计和陀螺仪积分提供的解决方案。
# 系统融合
INS 和 GNSS 都可以跟踪系统的位置和速度。INS 通常会在短期内减少误差,但在较长时间内会产生更大的、无限的误差。相比之下,GNSS 在短期内往往噪音较大,但可以在较长时间内提供更高的稳定性。当两个系统集成在一起时,GNSS 测量能够调节 INS 误差并防止其无限制增长。另一方面,INS 可以提供高输出速率的导航解决方案,而 GNSS 导航解决方案通常仅以 1 Hz 到 10 Hz 之间的速率更新。INS 解决方案将这两个系统的测量结果相结合,可以弥补 GNSS 更新之间的差距。GNSS/INS 系统使用卡尔曼滤波器来跟踪系统位置、速度、姿态、陀螺仪偏差和加速度计偏差的最佳估计。
# 高精度俯仰和横滚
与 AHRS 滤波器不同,没有对仅测量重力的加速度计做出任何假设。俯仰和横滚仍然是通过了解重力方向来确定的,但 GNSS 测量可以考虑动态运动对加速度计读数的影响。结合跟踪加速度计偏差的能力,GNSS/INS 系统中俯仰和横滚的动态精度通常比 AHRS 好 1-2 个数量级。
# 动态对准
在足够的动态运动下,GNSS/INS 通过称为动态对准的过程来确定航向。该系统将加速度计的加速度测量值与 GNSS 接收器的位置和速度测量值相关联,并能够通过这种比较准确地得出航向。
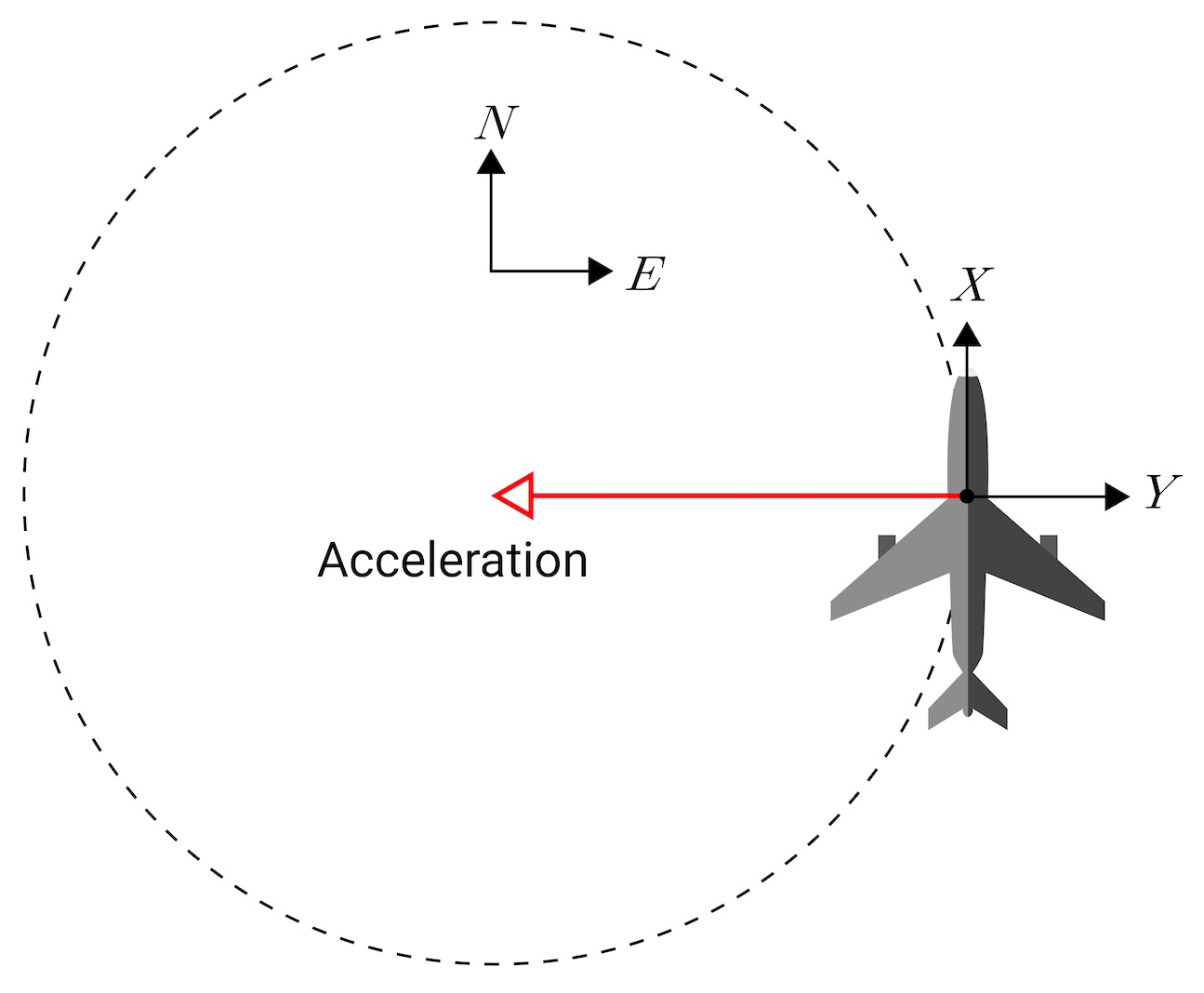
例如,考虑一个加速度计,它测量系统在车辆的负 y 轴上加速,而 GNSS 报告系统正在向西加速,如图 1.20 所示。将这两个测量值关联在一起得出负 y 轴必须与西对齐,因此系统必须指向北。
一些系统(主要是遗留系统)需要特定的运动模式来实现动态对准。但大多数现代系统所需的只是任何类型的水平加速,例如起飞时沿跑道加速、绕街区行驶或以 8 字形飞行。事实上,大多数小型车辆只需要达到适当的速度即可触发动态对准;汽车在高速公路上行驶时的微小波动或塞斯纳飞机在轻微湍流中的微小波动足以让卡尔曼滤波器观察航向。
请注意,动态对齐的过程与假设航向与速度矢量方向相同的过程不同。它是对车辆真实航向的测量,完全独立于地面航向 (COG)。
# 耦合架构
将 GNSS 和 INS 系统组合在一起时,可以使用几种不同的集成架构来耦合两个系统的测量结果。这些不同的方法通常称为松耦合、紧耦合和超紧耦合,如下图所示。

松耦合的 GNSS/INS 系统架构是最常见的集成方法。如图 松组合looselycoupled 所示,这种类型的集成将由位置、速度和时间组成的 GNSS 导航解决方案与使用扩展卡尔曼滤波器的 INS 导航解决方案相结合。该滤波器使用 INS 测量来预测组合系统的位置、速度和姿态。然后使用 GNSS 测量来更新该预测并估计 INS 中的陀螺仪偏差和加速度计偏差。这些估计的偏差用于补偿 INS 中的原始陀螺仪和加速度计测量结果,并提高其积分精度。在这种方法中,GNSS 接收器必须至少有四颗卫星处于视野中,才能计算接收器的位置和速度,并将其发送到扩展卡尔曼滤波器。如果接收器视野内的卫星少于四颗,组合系统将出现 GNSS 中断并默认使用 INS。
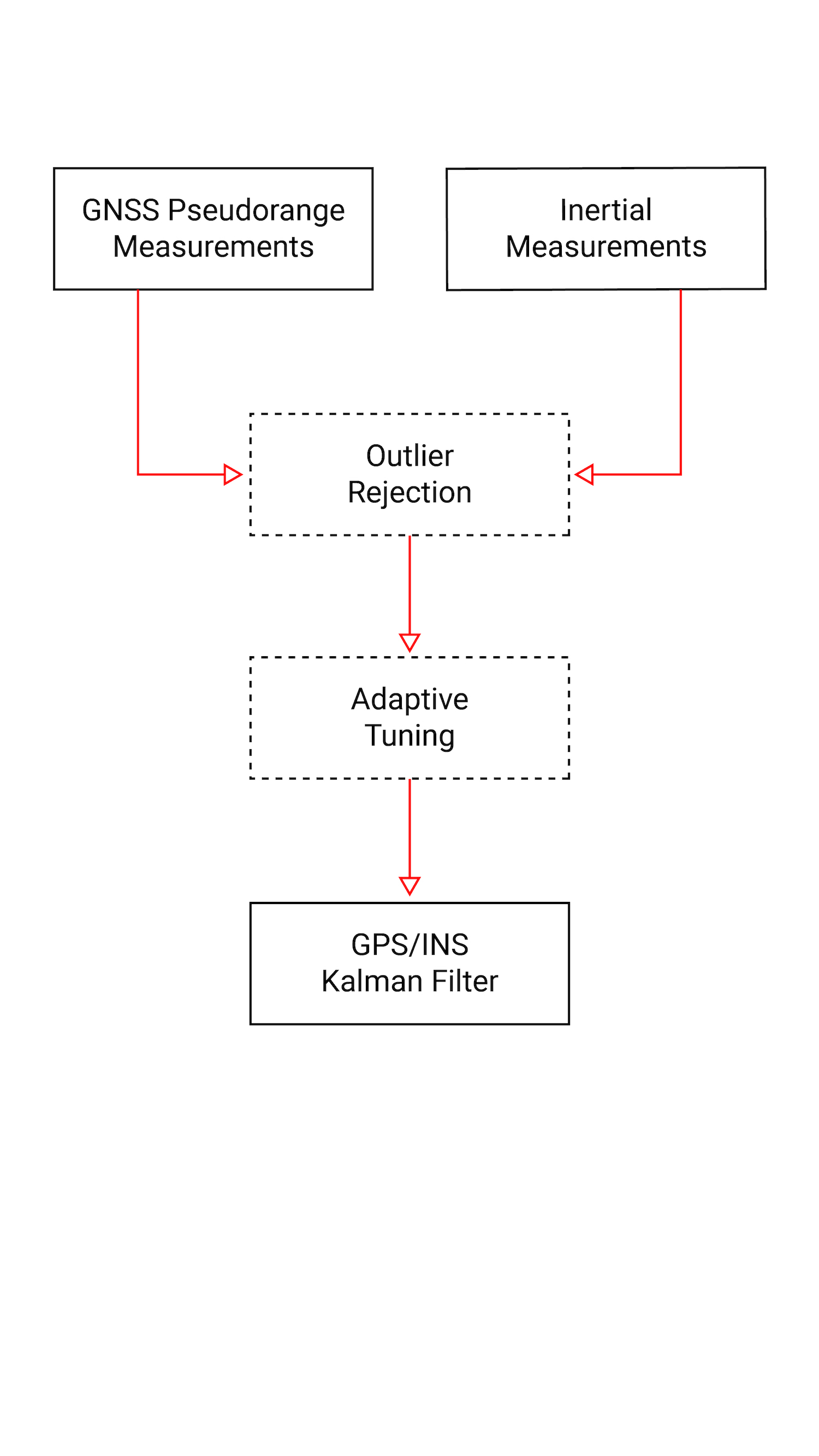
如图 tightlycoupled 所示,GNSS/INS 系统架构的紧耦合方法比松耦合设计的集成更加紧密。该方法不使用 GNSS 计算的完整导航解决方案,而是利用原始 GNSS 伪距和多普勒测量结果。如图 tightlycoupled 所示,原始 GNSS 测量结果与 INS 导航解决方案相结合,INS 导航解决方案包含集成位置、速度和姿态测量结果到扩展卡尔曼滤波器中。由于这种方法使用原始 GNSS 伪距和多普勒测量而不是完整的 PVT 解决方案,因此单个卫星可以为系统提供有用的 GNSS 更新。因此,紧耦合方法在仅具有部分天空视图或容易受到多路径误差影响的应用(例如城市峡谷)中最有用。
虽然紧耦合方法在能见度有限的环境中具有潜在优势,但在晴空条件下通常没有任何好处。此外,GNSS 接收器和 INS 采用(或不采用)的异常值抑制和自适应调谐算法决定了即使在城市峡谷中紧耦合是否真正具有任何优势。如果松耦合和紧耦合滤波器都天真地考虑每个 GNSS 测量结果,则两者的结果将是相同的。虽然可以在紧耦合场景中创建卓越的异常值拒绝算法,但实际上,许多紧耦合系统在头对头评估中远远低于松耦合系统。
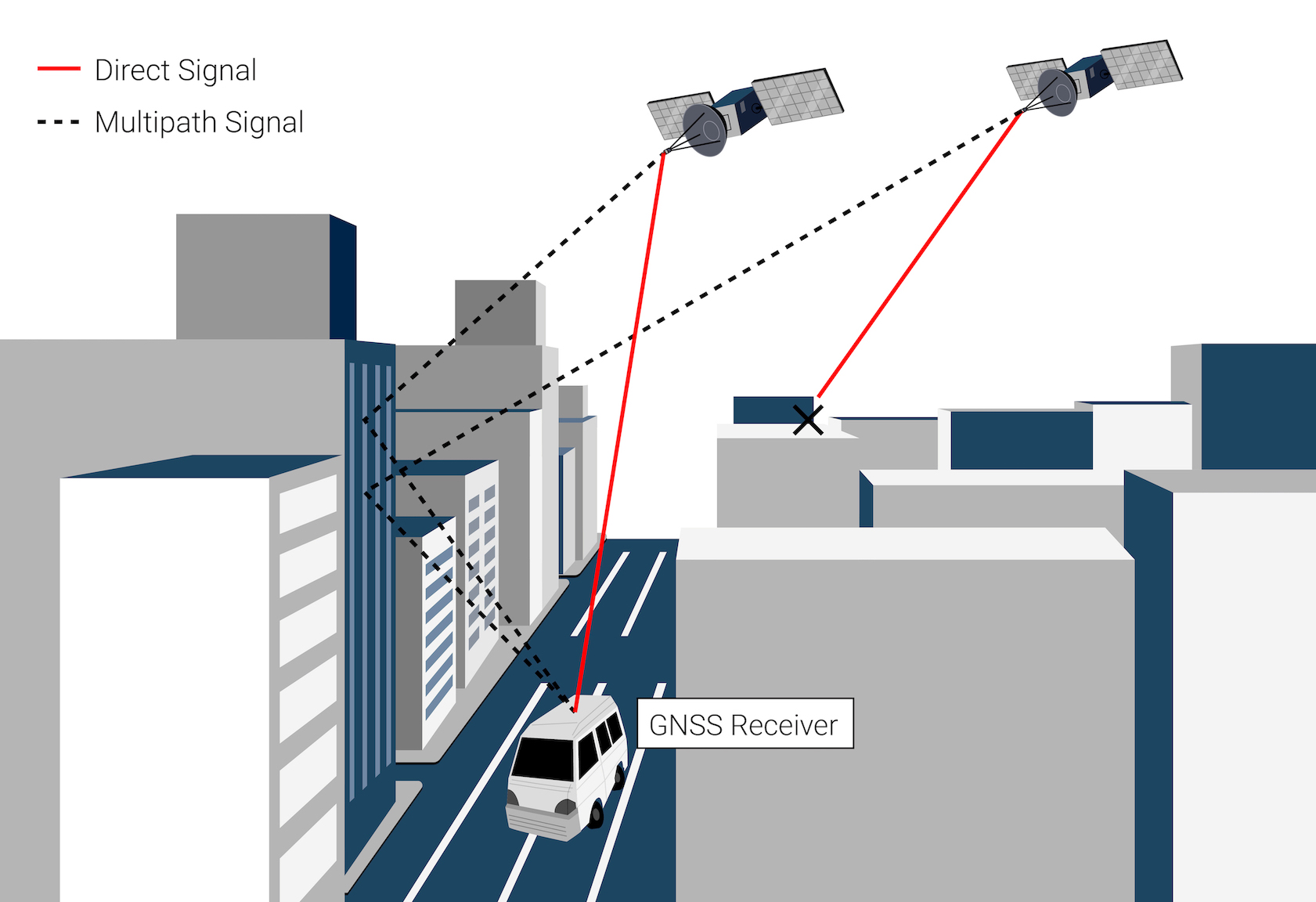
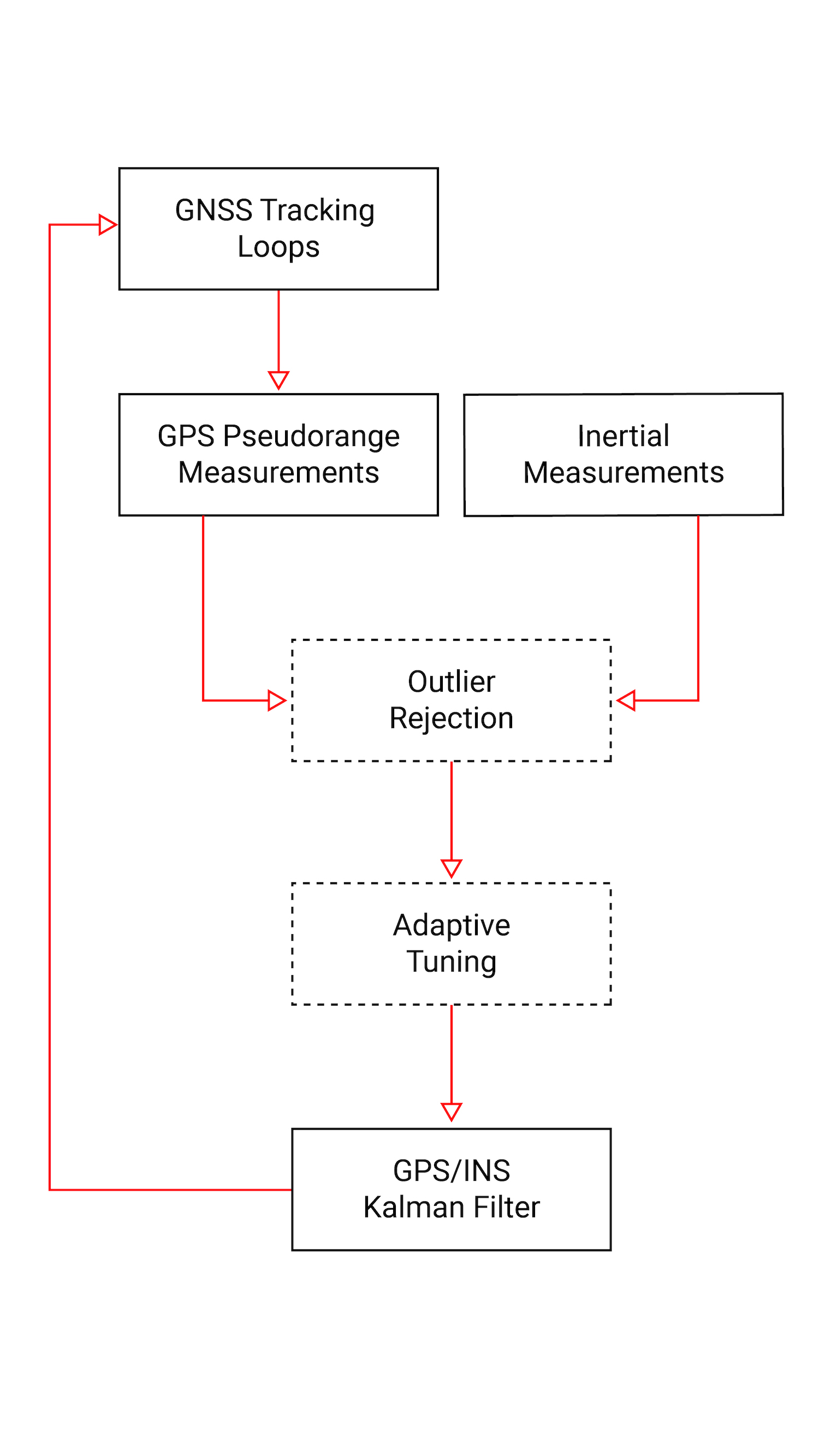
超紧密耦合的 GNSS/INS 系统架构是最紧密集成的方法,如图 ultratightly 所示。INS 不是让 GNSS 和 INS 作为独立系统发挥作用,而是用于帮助驱动 GNSS 接收器的跟踪环路,跟踪从 GNSS 卫星传输的载波信号。当卫星和接收器相对移动时,INS 提供高速率反馈以维持跟踪锁定,即使跟踪带宽比独立接收器中使用的跟踪带宽更窄。这种更窄的跟踪带宽提高了系统精度,并使接收器跟踪多路径信号而不是来自卫星的真实直接信号的可能性大大降低。然而,超紧耦合方法在工业中并未广泛使用,因为这种反馈回路会引入新的系统不稳定性,并消除独立 GNSS 和 INS 系统在松散或紧密耦合系统中提供的冗余。
# GNSS/INS 的挑战
虽然 GNSS 和 INS 作为独立系统所面临的许多限制可以通过将它们组合在一起来缓解,但使用 GNSS 辅助 INS 系统仍然存在一些挑战,包括在静态或低动态情况下丢失航向信息、 GNSS 误差是非高斯且非零均值的事实,以及 GNSS 中断的可能性。
# 静态或低动态情况
GNSS/INS 系统在低动态或静态情况下会失去航向可观测性,在这种情况下动态对准变得不可能。在短时间内的低动态期间,INS 可以保持准确的航向(尽管不断退化)(工业级约为 1 分钟)。大多数 GNSS/INS 系统依靠集成磁力计来继续稳定航向,尽管 AHRS 系统中遇到的磁航向问题开始发挥作用。
# 全球导航卫星系统错误
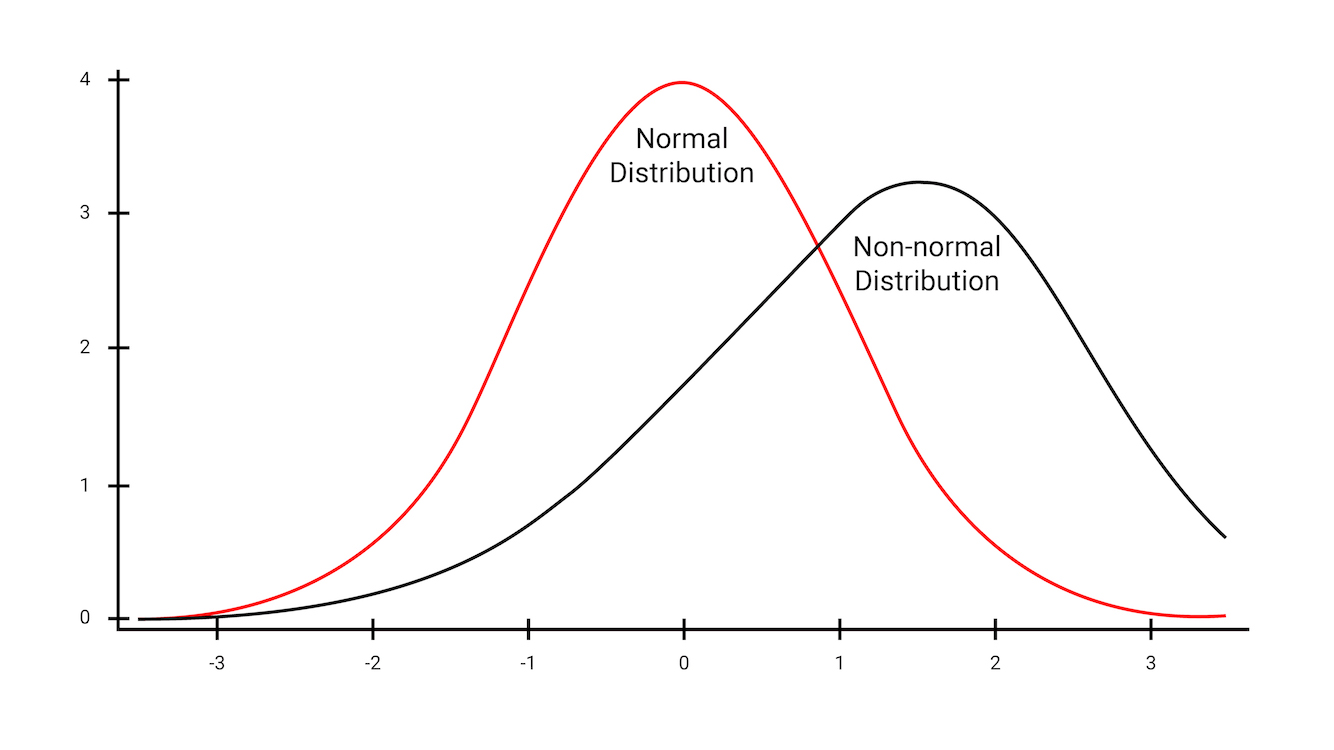
GNSS/INS 系统面临的另一个挑战是 GNSS 测量误差的本质是非高斯和非零均值。非高斯误差的分布与钟形曲线形状的分布不同,而非零均值误差则包含均值不为零的分布,类似于图 1.22。用于推导卡尔曼滤波器最优性的一个关键假设是系统中的任何误差都是高斯误差和零均值误差。由于 GNSS 误差违反了这一假设,因此在调整 GNSS/INS 卡尔曼滤波器以获得最佳性能时必须格外小心。
# GNSS 中断和阻塞
GNSS 中断也会给 GNSS/INS 系统带来问题,并且可能因信号阻塞或信号干扰而发生。从建筑物到树木等任何事物都可能导致 GNSS 信号阻塞,从而阻止 GNSS 卫星传输的信号到达 GNSS 接收器,如图 1.23 所示。信号干扰是由干扰引起的,并且可能是有意的,例如干扰或欺骗的情况,也可能是无意的,例如对信号造成干扰的无线电广播信号。当 GNSS 发生中断时,GNSS/INS 系统默认使用 INS,仅依靠 IMU 传感器来得出导航解决方案。根据 IMU 传感器的分类,单独使用 INS 来确定导航解决方案可能会导致估计值在短时间内出现较大漂移。