# 参考坐标系
本文是惯性导航所需大地测量学技能的简化版本。如果您想了解更多信息,我们建议您访问大地测量网站,例如
# 大地测量参考系统
大地参考系统是一组能够使用坐标来定位点的元素。要素是:
- 坐标系原点
- 轴方向
- 轴的比例
- 参考椭球体
最重要的大地测量参考系统是国际科学界对ITRS(国际陆地参考系统)的不同实现。这些认识是在技术进步和数据数量增加以改善结果的同时产生的。那么最好使用最新的实现来获得最佳的准确性。目前是ITRF2014(国际地球参考系2014)。
由于 GNSS 技术是由美国国防部创建的,因此他们开发了自己的大地测量参考系统,该系统对应于 WGS84(世界测地系统 1984)的不同实现。最初,通过 GNSS 测量获得的所有位置均以 WGS84 表示。它解释说这是最知名的一个。最新的实现 G1674 与 ITRF2014 一致,但一些细微的差异使它们仅在厘米级别上一致。例如,两个系统的参考椭球的短半轴有0.1mm的变化。
GNSS获得的解决方案取决于测量的类型。对于RTK或PPK定位,解决方案是在基站坐标系统中。对于 PPP 定位或使用 IGS 的轨道和时钟校正,坐标以ITRF2014表示。
由于两个大地测量参考系统(ITRF2014 和 G1674)非常接近,因此没有给出变换参数,并且可以认为它们是同一个系统(GNSS 获得的位置很少比一厘米更精确)。
# 坐标类型
对于每个大地测量参考系统,可以使用三种类型的坐标:笛卡尔坐标、地理坐标或投影坐标。
# 笛卡尔坐标系
这是在 3D 空间中定位点的最简单方法。它使用大地测量参考系统的三个正交轴(通常为 X、Y、Z)。
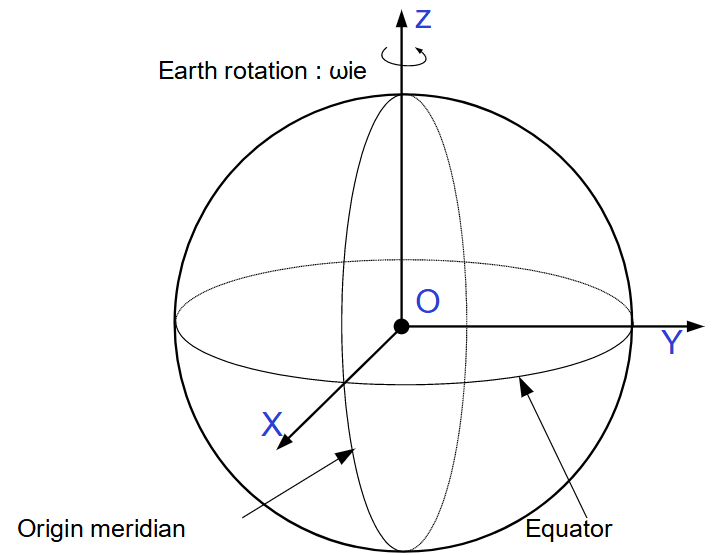
例如,ITRF2014的起源是地球的质心,包括海洋和大气。Z轴指向北旋转极点。XOY平面与赤道平面重合。X 和 Y 轴的方向更难理解,在这里没有真正的兴趣。选择刻度以对应于仪表。
# ECEF (地心参考坐标系)
如果坐标系的原点靠近地球质心,并且 X 和 Y 轴随地球绕 Z 轴旋转(因此不能用作惯性参考系),则此系统类型称为 ECEF(以地球为中心的地球固定)笛卡尔坐标系。
虽然这种类型的坐标非常易于使用,但它主要由科学界使用。大多数用户更喜欢地理坐标。
# 地理(大地测量)坐标系
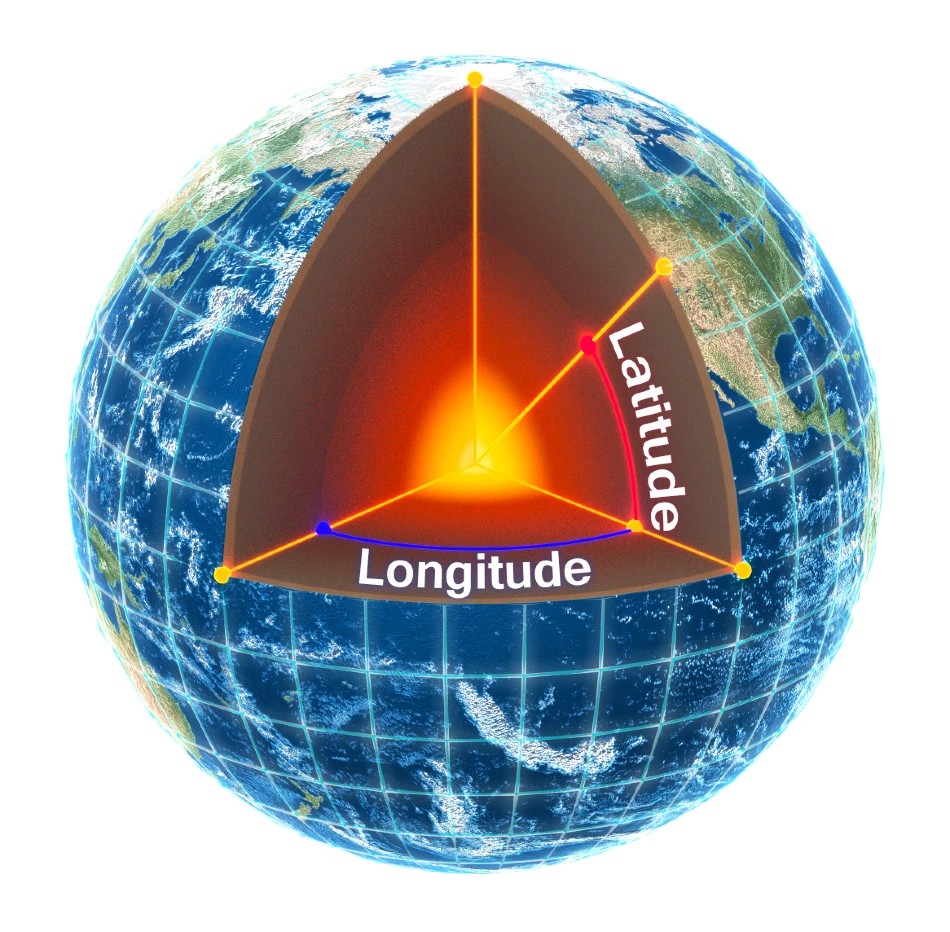
上述坐标也可以用地理Geographic形式表示。通过使用与大地参考系相关联的参考椭球体,将具有笛卡尔坐标的点投影到椭球体表面上以计算两个坐标:经度(λ)和纬度(ϕ),它们是角度。然后可以确定距椭球中心的距离:椭球高度。
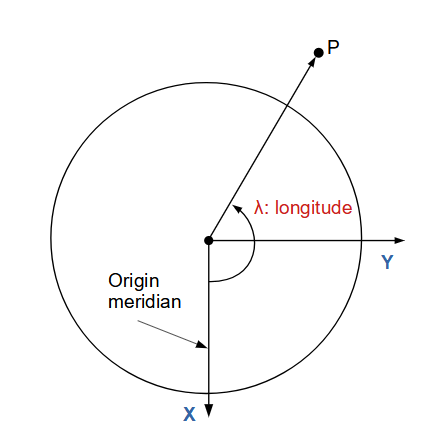
经度 (λ) 是赤道平面中从原点子午线到感兴趣点在赤道平面上的投影的角度。
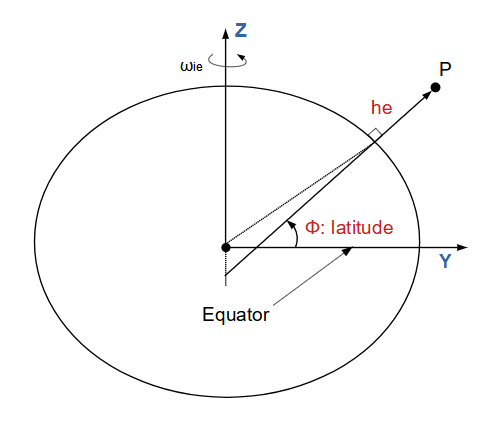
纬度 (ϕ) 是子午平面中从赤道平面到椭球法线的角度。请注意,在大多数情况下,椭球法线不会与地球中心相交。
椭球高度(he 或 h)是点与其在椭球上的投影之间的简单距离。

# 投影(平面坐标)
在小区域上工作时,可以为大地测量参考系统使用定义的投影。这种类型的坐标是指一个 2D 空间,其中参考椭球体的所有点都投影到一个平面上(有许多方法可以进行对结果产生不同影响的投影)。这种坐标系的优点是易于创建地图。但是,由于参考表面是从椭球体到平面的换位,因此会出现一些变形。常用的坐标是 E、N(东、北)。
请务必了解投影与大地测量参考系相关联,因此两个投影并不总是具有相同的基础。
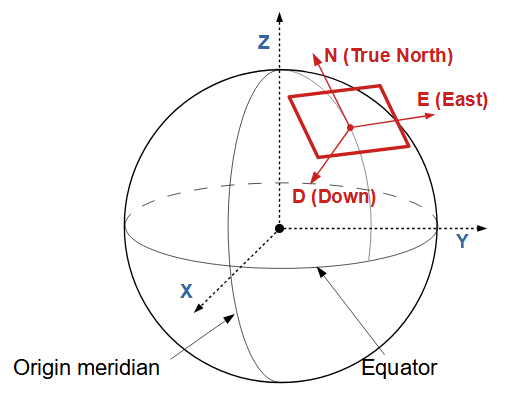
# NED坐标系(北东地)
在某些情况下需要相对定位,使用局部特定的大地测量框架以确保最佳精度。在导航中,此本地框架是指北、东、下矩形框架 (NED)。
该框架是通过在当前位置的切线平面中拟合局部椭球体形状获得的。此坐标系连接到相对于地球表面的固定点。
X 轴沿局部椭球法线向北转动,Z 轴向下转动,Y 轴完成右手规则,指向东方。
由于不可能将椭圆体形状完美拟合在平面中,因此该框架仅适用于局部测量。
当车辆高速移动时,导航算法在内部考虑了这种帧旋转,以确保最佳的导航性能。
# 海拔概念
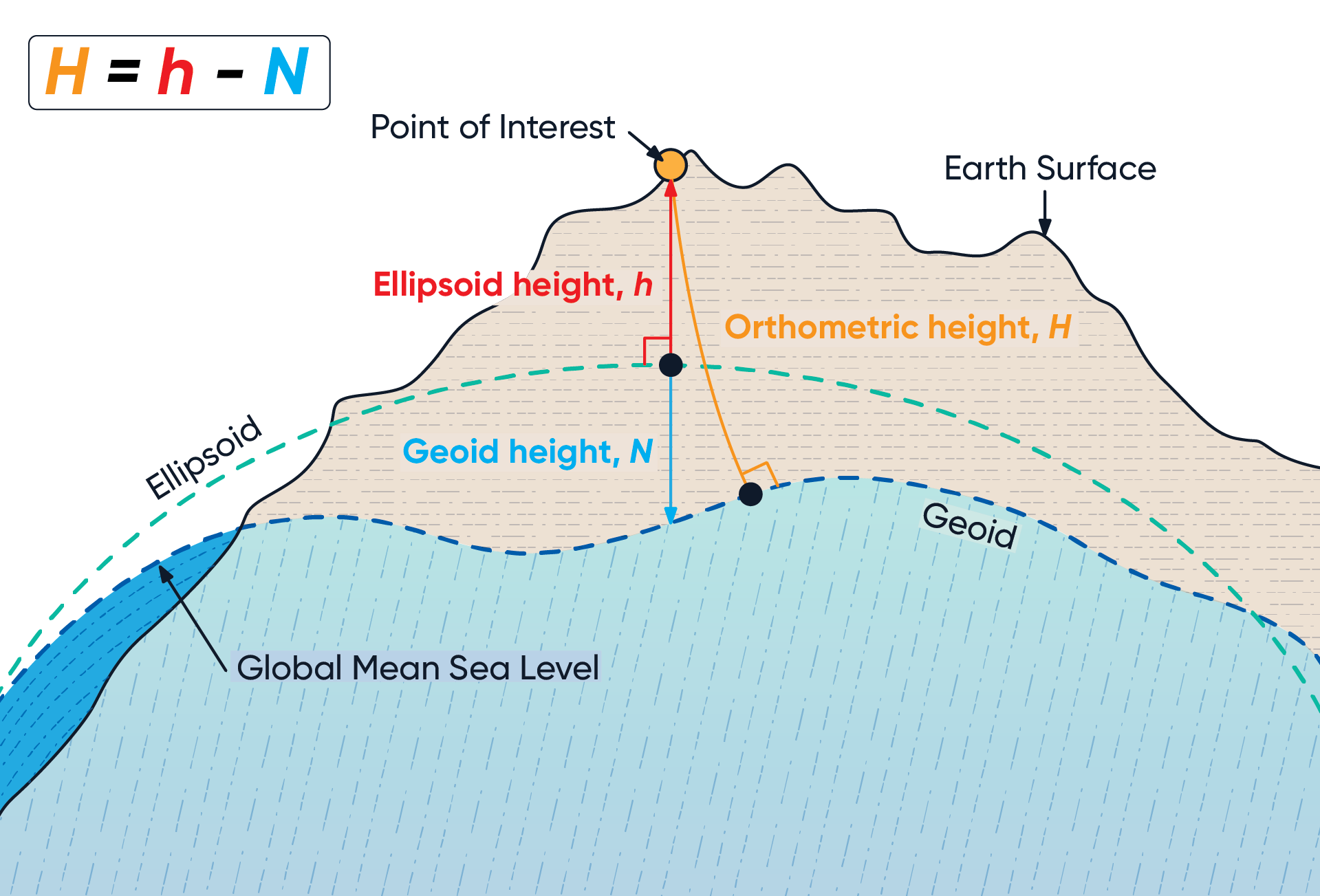
海拔(H)是一个极其复杂的概念,因此将在这里简要介绍。要定义,有必要解释什么是大地水准面(可以理解为平均海平面)。
大地水准面是重力的等势表面。这意味着它是一个表面,其中每个点的范数与局部重力方向相对应。最新的世界模型是EGM2008(地球重力模型)。由于局部重力取决于很多东西,它的表面绝对不像椭球体那样规则,所以它们不相等。
然后,高度是点与其在大地水准面上的投影之间的距离,距离遵循重力方向。这是一个物理定义。
可以使用重力模型将椭球体高度转换为高度。在下面的方案中,h 是椭球体高度,H 是高度,N 是大地水准面起伏。所以很容易推导出关系:h = H + N。
INS 使用具有 15 弧秒分辨率的内置 EGM96 模型提供参考椭球体和平均海平面的高度。
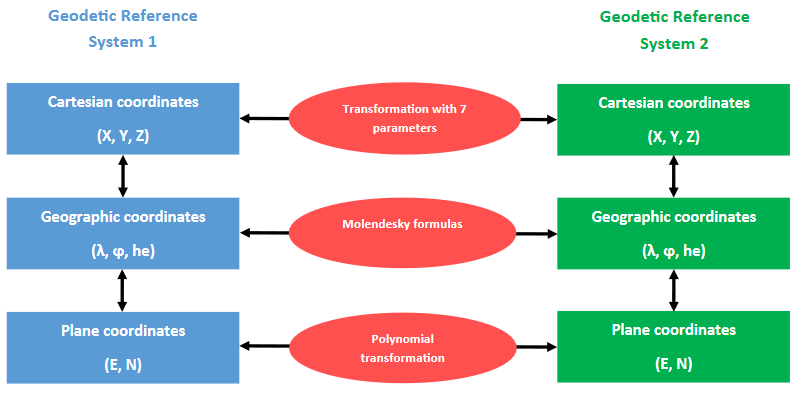
# 不同大地测量参考系统和不同类型坐标之间的变换
有时,您可以在多个大地测量参考系或不同类型的坐标中表示位置,因此您需要使它们都兼容。为此,下图显示了从一个系统到另一个系统的步骤。您会注意到有多种方法可以将坐标转换为其他大地测量参考系统,但保持精度的最佳方法是使用具有七个参数(三个旋转、三个平移和一个比例因子)的变换。这只能通过笛卡尔坐标来完成,因此您必须首先将坐标转换为笛卡尔形式。
如果大地测量参考系统考虑构造板块运动,则 7 个参数变换将变为 14 个参数变换(添加所有平移、旋转和比例因子的速度)。