
# 姿态和航向参考系统 (AHRS)
# Principle
姿态和航向参考系统 (AHRS) 是一种惯性传感器,由 IMU 和另一个用于航向确定的传感器(通常是磁力计)组成。
它使用垂直参考(重力)来稳定IMU。陀螺仪数据与卡尔曼滤波器加速度计的重力测量值融合在一起,以提供横滚角和俯仰角。对于航向计算,可以使用辅助传感器来稳定航向,例如磁力计或双天线 GNSS 输入。
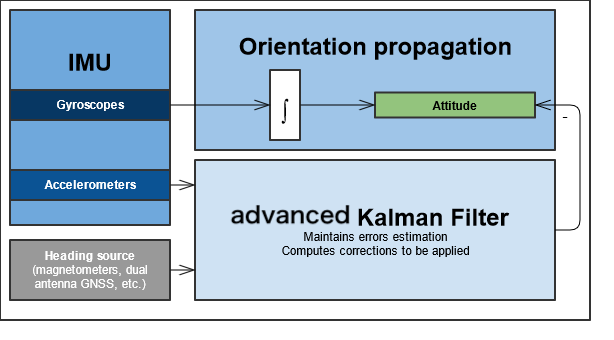
AHRS 利用陀螺仪的优势,在中低动态条件下提供准确的横滚、俯仰和偏航输出。它也非常易于设置和使用。 然而,在动态或磁干扰环境中,由于无法将加速度与重力(垂直)参考区分开来,其整体精度可能会降低。
为此,FDISYSTEMS开发了独特的自适应矢量跟踪算法,可以在动态的环境中实时估计线性加速度的大小,自适应的参考重力矢量。 可以自适应的对结构化的磁干扰进行估计补偿。