# Config界面
该界面主要进行参数配置、校准配置、滤波器配置和输出数据包配置等操作:
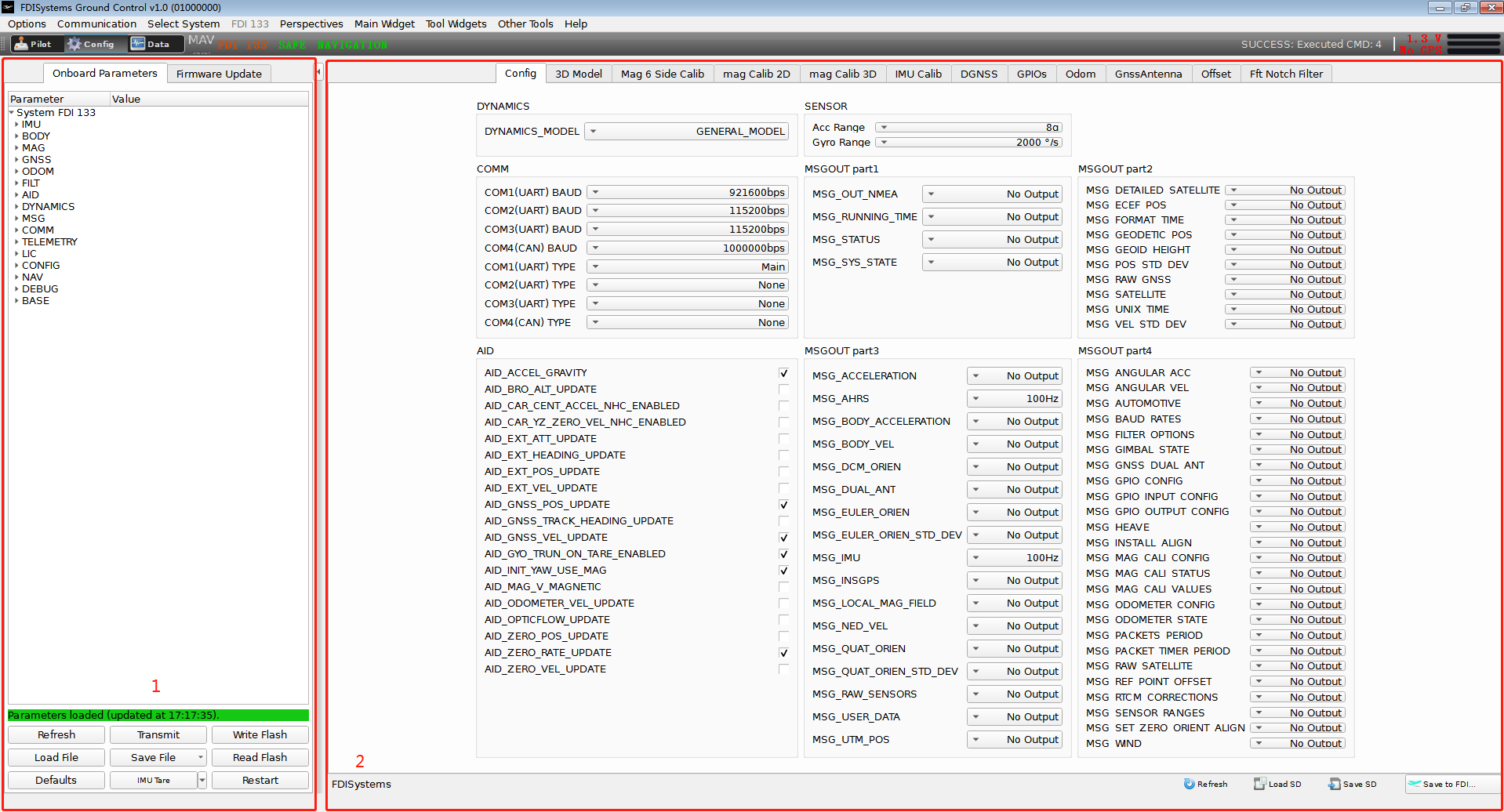
- 第一部分:该部分由 Onboard parameters 和 Firmware Update 组成。
- Onboard parameters显示的是FDISYSTEMS所使用的所有参数,可以通过进行刷新、发送、保存、读取、另存为文件等对参数进行操作; 还包含:恢复出厂设置、重启系统等操作,以及对imu进行陀螺仪、加速度计零偏校准、调平等操作,卡尔曼滤波器SPKF的配置参数以及传感器出厂时刻度因子、耦合误差、零偏等配置参数,一般不需要进行改动;
- Firmware Update与产品固件升级有关。
- FDI云第二部分:该部分由 config、3D Model、Mag 6 side calib 等功能配置界面组成:
# Config 界面:
该界面进行最主要的参数配置和输出数据包配置: DYNAMICS、COMM、AID、SENSOR、GPIO、 MSGOUT
# DYNAMICS 界面
- DYNAMICS 界面配置应用载体模型:默认使用 GENERAL_MODEL,车载应用可以使用AUTODRIVER_MODEL,该模型使用车辆非完整性约束,前提是载体没有侧滑运动。其他模型尚在开发中;
# COMM 界面
- COMM 界面配置 COMM1 到 COMM5 的波特率和端口类型,COMM1默认设置为主串口(Main),有且仅有配置为Main的COMM口可以连接FDIGroudStation上位机软件,因此不建议修改COMM1口的配置;其他COMM口可以设置为UBX、NMEA或者NMEA(OUT)等模式,具体配置信息可见第11章的表19和表20。对于DETA90/100等产品,部分默认的COMM口是不能修改的,如下表所示:
| COMM | DETA10/20/30 | DETA90 | DETA100 | EPSILON |
|---|---|---|---|---|
| Com1 | Main(不建议改) | Main(不建议改) | Main(不建议改) | Main(不建议改) |
| Com2 | None(可修改) | None(可修改) | None(可修改) | None(可修改) |
| Com3 | None(可修改) | Ublox(禁止修改) | UM982/Ublox(禁止修改) | None(可修改) |
| Com4 | None(不可用) | None(不可用) | RTCM_EC600(禁止修改) | None(可修改) |
| Com5 | None(可修改) | None(可修改) | None(可修改) | None(可修改) |
表: FDISYSTEMS系列产品的COMM口配置说明
# AID 界面
- AID 界面配置 SPKF 所使用的融合算法类型,具体见SPKF融合开关说明;
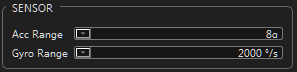
# SENSOR 界面
- SENSOR 界面配置加速度计和陀螺仪量程,如下图所示,量程越小,分辨率越高,但是使用场景限制更大。用户可以根据自己的实际应用场景修改加速度计和陀螺仪量程参数,以获得更好的效果。
# GPIO 界面
- GPIO 界面,有两个GPIO接口可用,主要用于配置1pps的输入和输出,对于DETA100系列以及EPSLION系列,GPIO1默认与内部GNSS接收机的1PPS引脚相连:

| GPIO类型 | 说明 |
|---|---|
| 1PPS Input | 输入GNSS 1PPS脉冲,上升沿有效 |
| 1PPS Output | 输出1PPS脉冲 |
### MSGOUT 导航数据输出 MSGOUT PART1/PART2/PART3 界面配置用户使用 FDILink协议获取的数据包类型及输出频率:产品均默认配置 100Hz 的 MSG_IMU 和 MSG_AHRS 数据包。用户可以根据第12章的 FDILink 通讯协议选择需要打开的数据包并设置对应的发送频率,配置完成后需要进行保存,重启生效,具体可见常用问题与解答部分第一个问题。
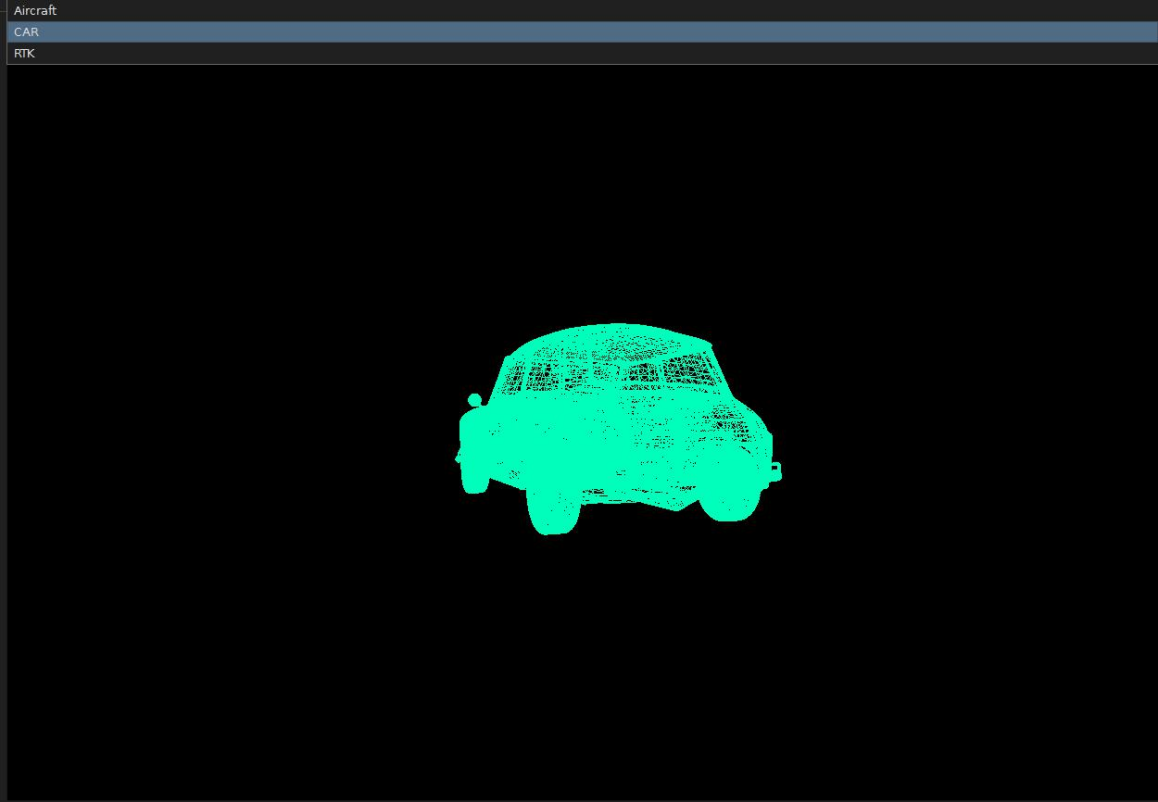
# 3D Model 界面
该界面将模块实时输出的姿态运用于飞机模型、汽车模型和 FDISYSTEMS 产品模型,通过鼠标滚轮可以进行放大缩小操作:
# Mag 6 side calib 界面
磁力计六面校准功能,具体使用说明见磁力计校准说明。
# mag calib 2D 界面
2D 磁力计校准功能,具体使用说明见磁力计校准说明节。
# Mag calib 3D 界面
3D 磁力计校准功能,具体使用说明见磁力计校准说明节。
# IMU Calib 界面
IMU 刻度因子,耦合误差项,零偏等校准功能。由于出厂时这些参数已经得到校准,因此该功能默认不启用。
# DGNSS 界面
该界面进行 RTK 相关配置,具体使用说明见10.9节:
# Odom 界面
里程计校准,具体使用说明见里程计校准节,
# GnssAntenna 界面
双天线校准,具体使用说明见惯导双天线安装与校准说明节。
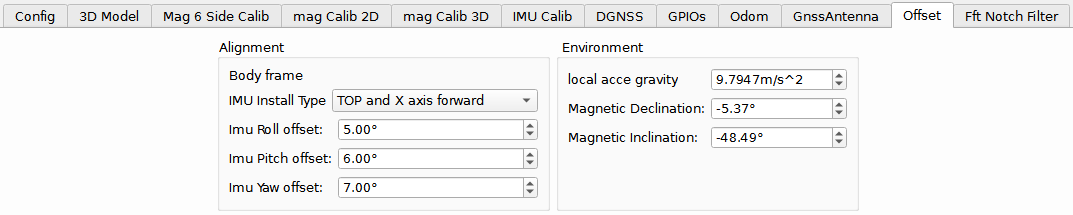
## Offset 界面 常见参数配置界面,如下图所示,左边是模组到载体的安装误差角配置框,右边是当地重力加速度、磁偏角和磁倾角配置框。这些配置参数均可在 Config 界面最左侧的 Onboard parameters 里找到