
# 磁校准
# 磁校准
# 概述和背景
本文介绍了当 FDISYSTEMS传感器绑在影响局部磁场的物体上时如何校准它们。
FDISYSTEMS传感器在工厂经过全面校准。然而,磁传感器对其周围环境(主要是其所束缚的物体)非常敏感:一些材料可以产生与地球磁场相加的磁场,而另一些材料可以扭曲现有的磁场。这些影响将通过磁力计测量,并且不会与地球磁场区分开来,因此航向估计会出现误差。这个误差的量可能非常大,在许多情况下达到几十度。
FDISYSTEMS精心挑选了不会干扰内部磁场的外壳才材料。因此装置本身不应过多干扰磁场。不幸的是,有时无法在客户的系统中消除磁性材料的干扰。磁力计失真有两种情况,如下所述。
硬磁扭曲
这种扭曲是由磁铁或任何具有磁铁作用的物体引起的。磁化螺钉或螺母等物体非常容易。硬磁产生的磁场与地球磁场相加。无论设备方向如何,硬磁效应都会以恒定的偏移量改变磁力计测量的磁场。产生高电流(几安培)的电源及其相关电线也可能产生磁场。
软磁扭曲
这种扭曲是由放置在设备附近的铁磁物体引起的。例如,铁和某些钢是铁磁材料,但更一般地说,任何粘在磁铁上的东西都是铁磁的。铁磁材料不产生自己的磁场。相反,它们会对现有磁场(在我们的例子中是地球磁场)做出反应。通过这种方式,软磁根据磁场方向以不同的方式扭曲局部磁场。除了改变磁场测量值之外,与惯性参考系相比,它还倾向于旋转磁场。这种旋转可能非常显着,在某些情况下达到数十度。这就是为什么软磁更难补偿的原因。
简单说硬磁干扰,是常值偏移,软磁是旋转和刻度因子矩阵让磁场变形。
# 先进的校准程序
FDI Systems始终寻求最佳质量,通过使用新的磁坐标系对齐补偿来保持领先一步。当市场上的标准校准受到较大且非恒定误差的影响时,FDI系统保证可靠且易于执行的校准。
# 什么可以补偿,什么不可以
区分可以校准的干扰和不能校准的干扰至关重要。
来自相对于设备坐标框架固定的材料产生的失真可以通过校准程序进行补偿。
未随设备固定且相对于设备独立移动的失真或随时间变化的失真无法补偿,必须尽可能加以限制。
磁场的失真通常非常局部地起作用,因此在实践中,使设备远离噪声或时变磁场可能会使误差可以忽略不计。理想情况下,使设备远离至少 3 米的干扰源。
得益于其内部卡尔曼滤波器,FDISYSTEMS能够应对短期的外部失真。处理持续长达几分钟的变形时不会有明显的航向漂移。
# 程序
该程序的主要目标是在许多不同的方向上进行磁场测量。这是通过向不同方向旋转设备以测量磁场来完成的。FDI Systems独有的算法能够以3D方式绘制磁失真并对其进行补偿。通过的方向越多,结果就越好。
如果您无法在所有可能的方向上自由旋转设备,校准算法可以轻松应对它,并且您仍然可以在所覆盖的方向上获得良好的精度。但是,执行校准至少需要 9 个明显不同的方向。
根据设备的自由度,提供两种类型的校准:
为了获得良好的效果,重要的是要远离至少3米的所有外部磁干扰源。请注意,建筑结构通常包含钢材和其他干扰源,以及计算机、椅子、书桌等。
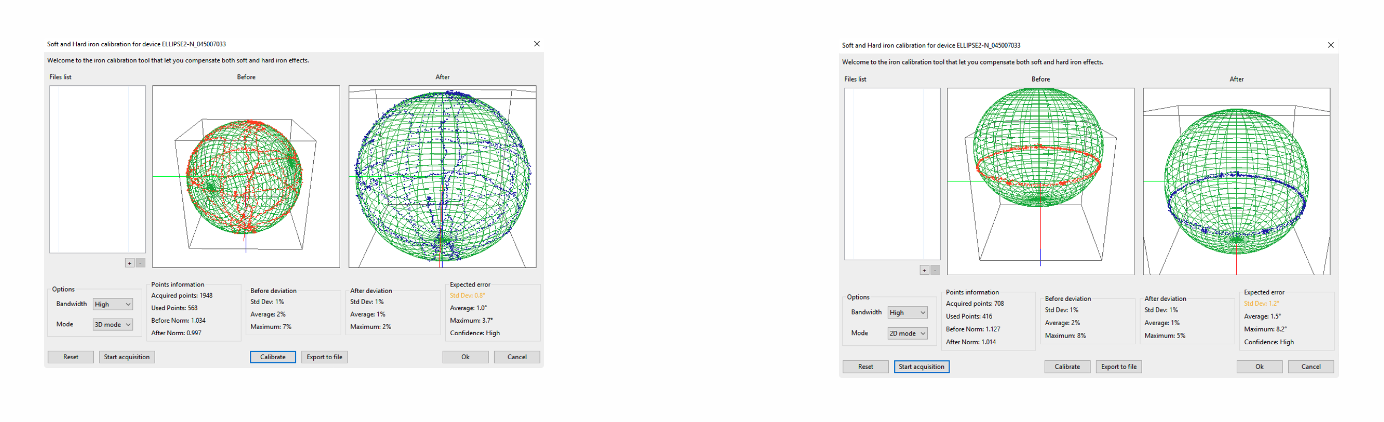
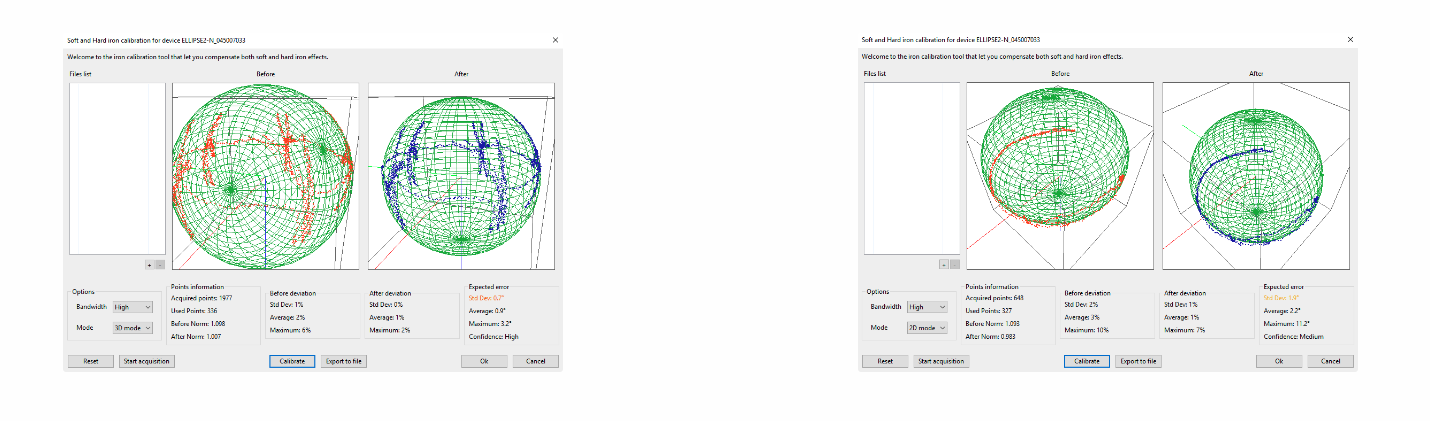
# 3D 校准
3D校准程序是标准程序,应首选,因为它将在大多数应用中提供最佳性能。当用户启动它时,设备必须通过最大数量的不同方向旋转。用户只需以相对较慢的速度定期旋转设备(< 250°/s 的旋转是可以接受的)。过快的移动可能会削弱结果。
理想情况下,这些点应绘制一个完整的椭球体形状。用户必须尝试覆盖此椭球体形状的最大范围才能获得最佳效果。校准后,所有方向的磁场范数应等于1.0。在这种情况下,校准后的所有点都应放置在单元 3D 球体上。
# 2D 校准
有时,无法在 3D 模式下移动设备。2D 校准适用于这些情况。该过程只是通过水平圆旋转设备。可以覆盖不到一个完整的圆,但通过完整的 360° 覆盖可以获得最佳效果。在执行校准之前,磁力计读数应形成 2D 椭圆。校准后,所有方向的磁场范数应等于1.0。在2D情况下,所有可能的磁场都应放置在一个单位圆上。
2D 校准算法经过专门设计,即使在运动非常有限的情况下也能充分利用所有可用数据。但是,由于物理和数学限制,在该校准模式下无法完全重新对齐磁性和惯性坐标系。这可能导致航向测量值的残余偏移,这取决于要校正的干扰大小。
无法估计此偏移量,但您可以通过将设备放置在已知标题来读取它。
2D 校准需要传感器位置(纬度、经度、海拔)和日期信息才能正常工作。它可以通过 Ellipse-A 产品的“初始参数”提供,或者/和当系统进入 Ellipse E 和 N 型号的导航模式时提供。
# 校准方式
FDI系统现在支持两种提供相同性能水平的校准方法。要使用的方法的选择取决于用户集成约束。
- FDICenter方法,这是最简单的方法,应该适合大多数应用程序。它可以使用实时数据或以前记录的数据。这需要一台连接到传感器的计算机,但它提供了漂亮而强大的实时反馈。
- 板载校准方法,提供与上述方法相似的性能,但不需要执行任何特殊硬件。椭圆在收到相应的命令时会自行完成!
# fdiCenter 方式
如果计算机可以连接到设备,则建议使用此方法。它非常灵活,允许实时校准,以及使用日志文件进行校准。
# 校准界面的介绍
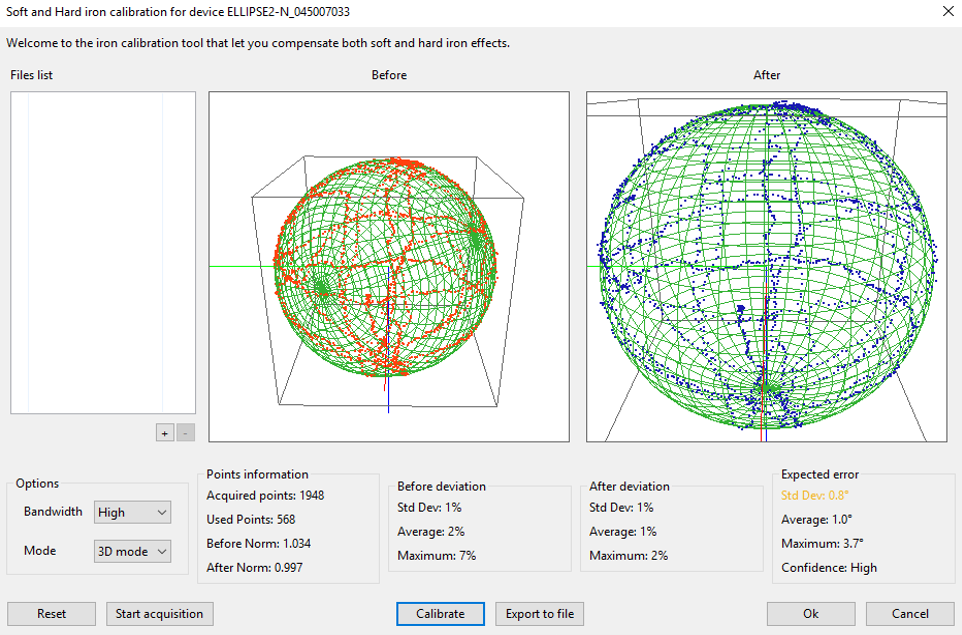
窗口左侧有一个文件列表,其中包括要重新处理的日志文件或之前记录的日志文件。多个文件可用于一次校准。
然后,显示两个 3D 图:
- 第一个“之前”显示 3D 中的所有点,因为它们是在任何硬/软铁校准之前由磁力计测量的。该显示是实时更新的。
- 第二个“之后”将显示相同的点,由校准算法转换。仅当按下校准按钮后,该显示才会更新。
这些 3D 绘图可以使用鼠标轻松旋转,还可以使用鼠标滚轮放大/缩小。当您旋转一个绘图时,第二个绘图也会旋转,以便两个显示器中的视野保持相同。
底部有几个按钮可以:
- 重置校准数据
- 开始/停止实时采集
- 校准获取的数据
- 保存获取的数据以供将来使用
- 完成或取消校准
一些选项将允许用户调整校准行为。这些选项可以在执行采集之前或之后使用,因此可以尝试新的设置,看看在 2D 或 3D 中是否可以更好地执行校准。
- 可以降低默认设置为“高”的带宽,以提高针对嘈杂磁场环境的校准鲁棒性。如果选择“正常”或“低”带宽,建议在校准期间缓慢移动传感器(旋转 < 100°/s)。如果观察结果确实有噪声,则与设置为“正常”或“低”时相比,该阈值设置为“高”时更有可能拒绝校准。
- 模式可以设置为 3D 或 2D。 3D 是默认的,只要可以提供足够的运动就应该使用。事实上,2D 校准是局部真实校正,这意味着对于大的滚动角和俯仰角和/或不可忽略的纬度变化,磁北将被拒绝。
最后,几个方框将告知用户校准程序、其结果以及一些质量提示:
- 积分信息:显示收集的积分数量。收集的点越多,校准效果就越好。按下校准按钮后,将显示当前磁场的长度(“标准后”)。通过良好的校准,该长度在所有方向上应始终等于 1。
- 偏差前:每次按下校准按钮时都会更新此信息。它在校准前告知局部磁场的扭曲情况。平均偏差代表磁场。 STD Dev 定义了观察到的噪声,最大偏差表明环境的噪声程度。
- 偏差后:这是应用完整校准算法时磁场的偏差。平均偏差是最具代表性的信息。 STD Dev 定义了观察到的噪声,最大偏差代表校准期间执行的所有测量的最差情况。
- 预期误差:最后,此框以度数显示完全校准后的预期磁航向误差。 STD误差是最具代表性的信息,它带有颜色代码(深绿色最佳,绿色良好,橙色可接受,红色不好),代表对校准结果的置信度。最大误差代表校准期间执行的所有测量的最坏情况。如果最大误差较高,则可能来自校准过程中受干扰的磁场。
# 实时程序
在启动校准程序之前,建议将设备放置在没有外部磁场的地方(任何失真源超过 3 米)。
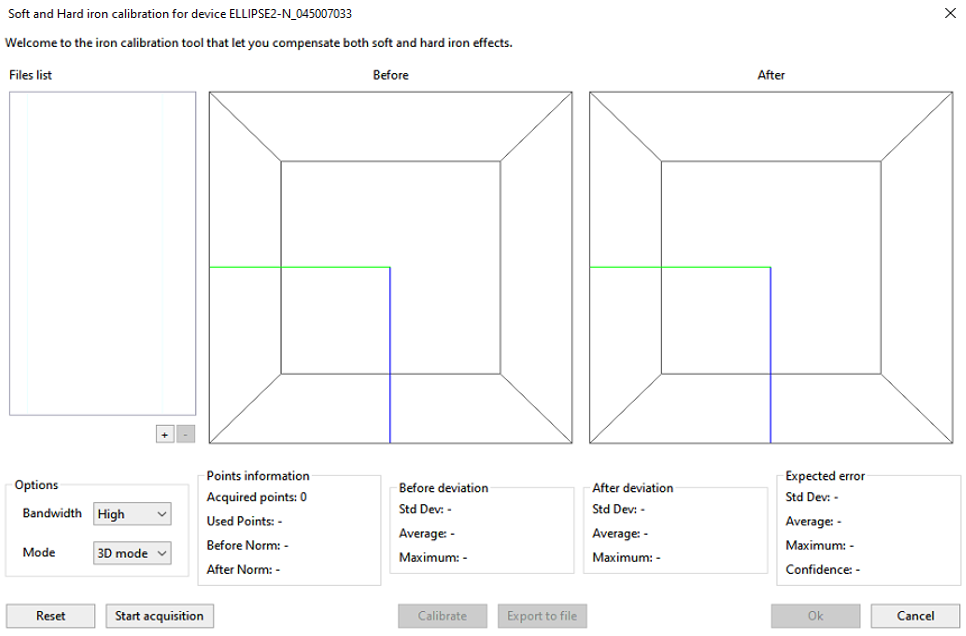
# 第 1 步:启动/重置程序
启动软铁和硬铁校准工具后,将出现以下窗口。当设备准备好进行校准时,您可以单击“开始采集”按钮。
# 第 2 步:旋转设备
理想情况下,围绕每个轴旋转设备,指向下方,然后向上进行 3D 校准。对于 2D 校准,只需确保在平面内大致旋转(避免过多的滚动/俯仰运动)。缓慢旋转设备以获得最佳效果。我们建议至少 8 秒才能完成绕一个轴的完整 360° 旋转。

# 第 3 步:按下“校准”按钮
如果校准工具在校准过程中检测到某些问题,将出现一个弹出窗口,告诉您问题所在。可能的错误可能是在校准过程中没有观察到足够的运动,或者由于运动过快或磁场太嘈杂而导致的对准问题。
# 第 4 步:按 OK 完成程序。
校准数据将被发送到设备并保存到内部闪存中。
# 板载校准
机载校准方法与FDICenter方法具有相同的工作原理。因此,我们建议您在使用板载方法之前,先使用 FDICenter 方法熟悉磁校准中涉及的概念。
板载和FDICenter方法将提供类似的性能。板载校准的内存仅比标准 PC 小,因此无法存储超过 1000 个校准点。请注意,这不会影响性能,因为智能系统仅将相关点存储在内部存储器中。
板载校准使用不同的低级命令来实现完整的过程,我们基本上将运行与FDICenter方法相同的步骤。
上述FDICenter方法中提到的所有属性以及校准过程产生的所有属性都将在板载校准方法中提供,但“后规范”值除外。将提供质量和置信度指标:
# 质量指标
- 0 最佳:校准后磁场与惯性运动非常相干
- 1 好:检测到惯性运动的磁场偏差很小。磁性校准仍应提供准确的航向。
- 2 差:检测到惯性运动的大磁场偏差。
- 3 无效:未计算有效校准。磁性校准失败或部分失败(请参阅错误弹出窗口)。
# 置信度指标
- 0 高:报告的质量指标是可信的。
- 1 中:使用了很少的显著磁场点。
- 2 低:用于计算磁校准的数据集没有意义。
如果质量指标为 0 或 1,且置信度指标为 0,则应认为校准是适用的。
# Procedure
# 启动校准
命令 FDI_ECOM_CMD_START_MAG_CALIB 被发送到椭圆以开始磁校准。此时,用户必须定义一些校准参数:
- 必须选择带宽(高、中或低带宽)。高是默认值;其他选项可用于应对嘈杂的磁场。
- 2D或3D校准模式。
# 计算校准参数
使用命令 FDI_ECOM_CMD_COMPUTE_MAG_CALIB,椭圆将计算所有校准参数,并返回校准结果,其中包含高级质量指标,以及有关如何解决任何校准问题的指示。
# 将校准参数存储到 Ellipse 内部存储器中
一旦 Ellipse 返回了正确的校准参数,用户就可以决定是否应用它。为此,必须使用 FDI_ECOM_CMD_SET_MAG_CALIB 命令发送返回的校正向量和矩阵作为参数。
最后,必须使用 FDI_ECOM_CMD_SETTINGS_ACTION 命令将新配置发送到闪存,以便在下次启动时使用。
# 建议和限制
# 覆盖最大不同的方向
在校准过程中,当覆盖各种方向时,将始终提供最佳结果。从理论上讲,只需要几个方向就可以绘制整个磁场。但由于噪声测量、外部磁场和其他影响,最好收集最大量的数据以获得良好的结果。
# 有限的自由度
如果设备不能在所有方向上自由旋转,则算法仍将是准确的,但仅限于校准过程中覆盖的方向。
# 远离任何外部的干扰源
磁力计和校准算法无法区分由外部磁场引起的失真和由设备所搭载的物体引起的失真。这些外部变形可能由建筑结构或铁桌、电脑等产生。
因此,在大约 3 米范围内将设备远离铁磁性物体非常重要。
如果在一组有限的方向内进行校准,则此建议变得更加重要。
# Specific applications
具体应用
该页面详细介绍了如何在机载应用上执行强制校准过程。 该页面详细介绍了如何对船舶应用执行强制校准过程。