
# DVL 安装
多普勒速度仪(DVL)是一种声学测量相对于水底速度的声纳设备。主要是用于船舶的定位导航中。
多普勒计程仪是根据声波在水中的多普勒效应原理而制成的一种精密测速和累积航程的仪器。它是一种计算法定位导航设备,计算法定位导航是一种古老的技术,它必须依靠船速这一重要参数,船速的准确程度直接影响到定位精度。 利用发射的声波和接收的水底反射波之间的多普勒频移测量船舶相对于水底的航速和累计航程。这种计程仪准确性好,灵敏度高,可测纵向和横向速度,但价格昂贵。主要用于巨型船舶在狭水道航行、进出港、靠离码头时提供船舶纵向和横向运动的精确数据。多普勒计程仪受作用深度限制,超过数百米时,只能利用水层中的水团质点作反射层,变成对水计程仪。
# 机械安装
DVL必须牢固地固定在船体结构上。
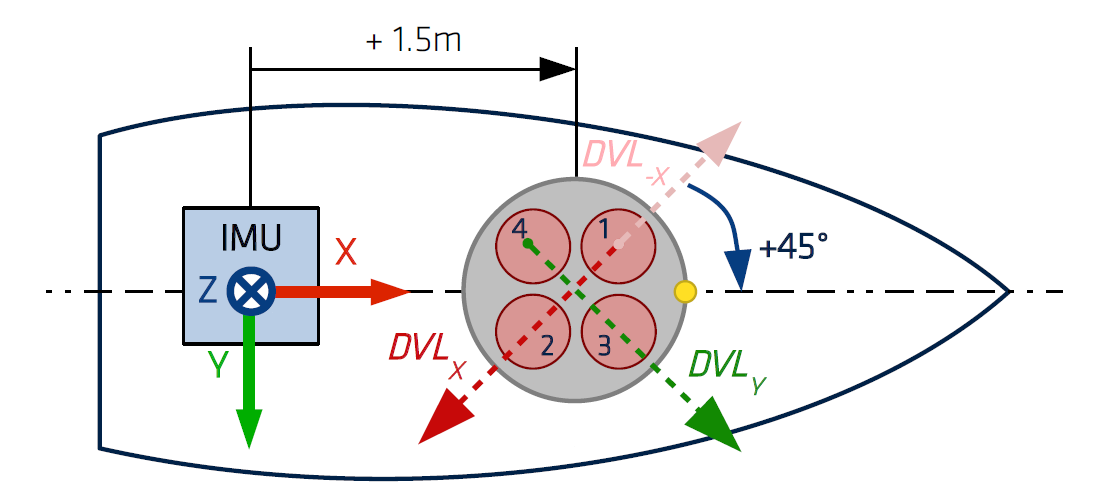
建议将DVL前向标记对准船首。
在这种情况下,在惯性系统配置中输入的标称对准角为+45°。
请注意,本机 DVL 仪器框架(图中显示的 DVL~X~ 和 DVL~Y~)是左手框架,而 FDI Systems 产品在右手坐标系中运行。因此,在应用用户对齐角度之前,我们在内部直接在接收到的传感器输入上反转DVL~X~和DVL~Z~速度。
下图显示了DVL仪器框架以及用于DVL到容器错位确定的倒DVL~-X~(粉红色箭头)轴。
从 IMU 到 DVL 的杠杆臂也必须准确测量。
# 电气连接
典型的DVL电气集成主要考虑两个方面:
- DVL数据输出
- DVL和INS之间的同步
# 数据输出连接
关于数据输出,通常使用简单的串行连接,通过将DVL串行端口连接到FDI INS可用的串行端口之一(例如。端口 A Rx),在 RS-232 或 RS-422 中。
# DVL和FDI INS之间的同步
# DVL Master
在这种操作模式下,DVL自行运行,只要有新的速度测量可用,就可以向FDI INS发送同步脉冲。
根据水条件,测量速率可能不是恒定的。
要在此模式下工作,DVL 同步输出必须连接到一个可用的 FDI INS SYNC IN 引脚。
# DVL Slave
在这种操作模式下,FDI INS产生一个规则的脉冲信号来触发DVL的每次测量。
在此模式下,测量速率可以是恒定的,由 FDI INS SYNC OUT 速率驱动。
但是,在设置同步输出速率时必须小心,以根据任务期间的DVL类型,配置和最大深度来达到最低DVL的计时要求。
换句话说,DVL必须能够发送超声波脉冲,等待回波并在下一次触发发生之前处理数据。
FDISystems 建议您联系您的 DVL 制造商,以了解根据您的系统配置和水环境可以使用的允许同步输出速率。
根据经验,在浅水条件下,1Hz 和 10Hz 之间的更新速率是可行的。