
# 安装角度对准
传感器对准过程包括两个步骤:轴对准和精细对准。一些辅助传感器还必须考虑未对准,这将像IMU一样进行测量,将外部传感器与车辆坐标框架进行比较。
# 轴未对准
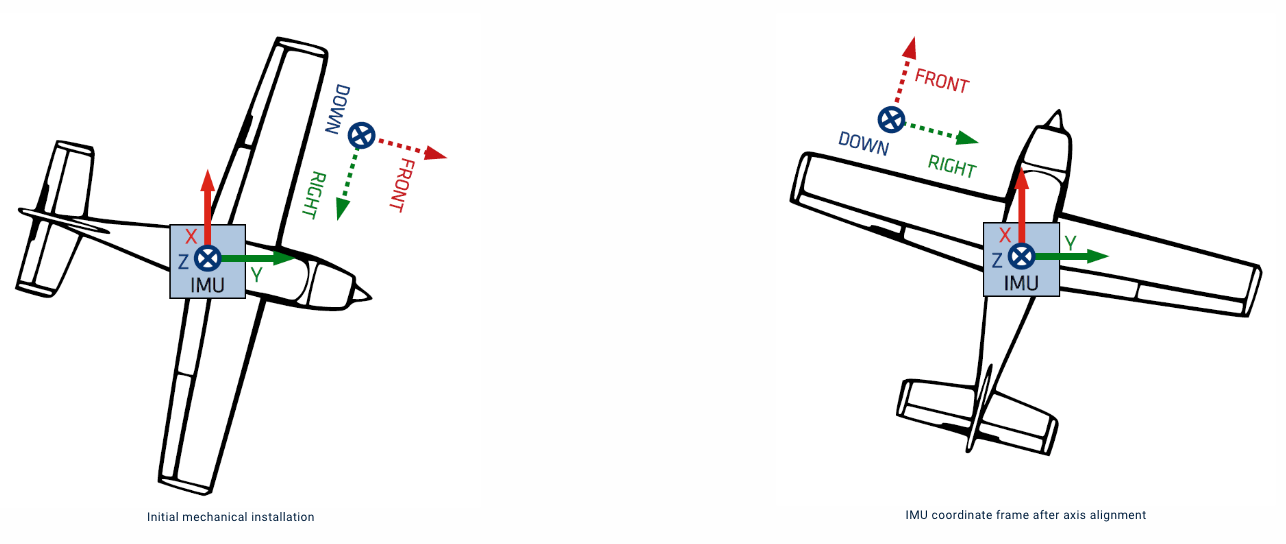
以下示例显示如何测量 IMU 轴未对准。IMU 轴必须与车辆轴进行比较,如下所示:
| IMU 轴 | Vehicle 方向 |
|---|---|
| X | LEFT |
| Y | FRONT |
| Z | DOWN |
# 轴示例对齐
# 精细未对准
一旦执行轴轴未对准,则必须按如下方式测量小残余角。未对准角度对应于从 IMU 坐标帧传递到车辆坐标帧所需的残余旋转。在我们的示例中,alpha 对应于错误标题,其符号为负数。
大多数应用在滚动时只有低角度和俯仰未对准。如果预计横滚和俯仰角度较大(> 5°),用户必须考虑旋转组成顺序:横滚,然后俯仰,然后偏航。
| Mis Angles | Value |
|---|---|
| misroll | Not Shown |
| mispitch | Not shown |
| misheading | -α negative) |
# 未对准残差测量:
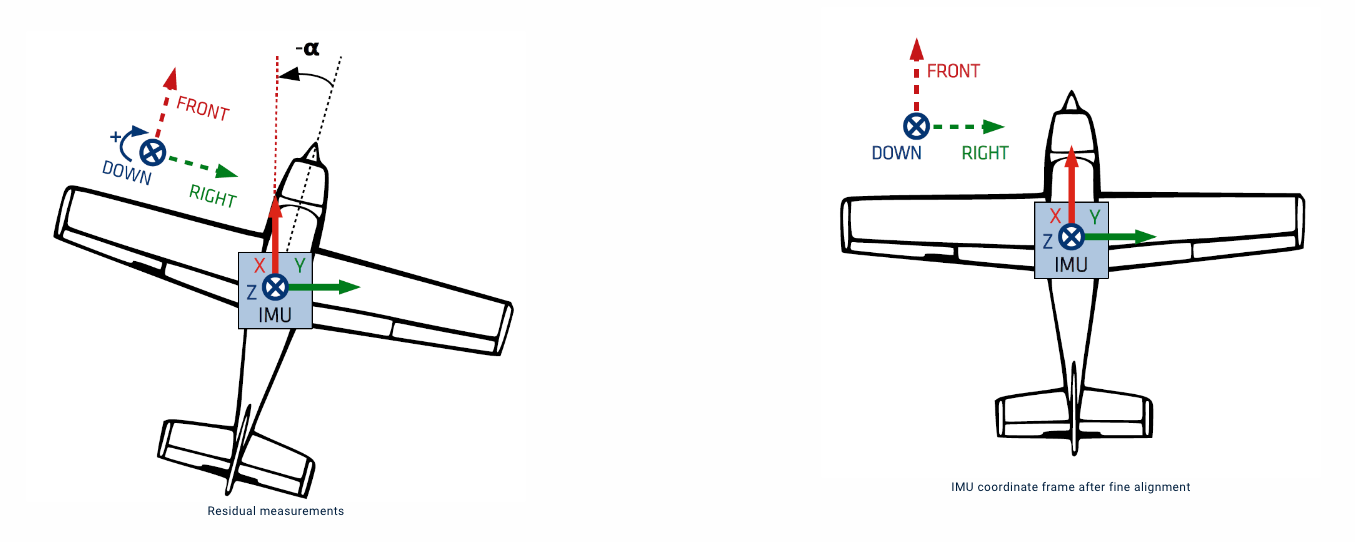
一旦测量了精细的错位角并将其输入到设备配置中,就假定传感器坐标框架与车辆坐标框架对齐。
# 载体 roll, pitch and yaw 未对准
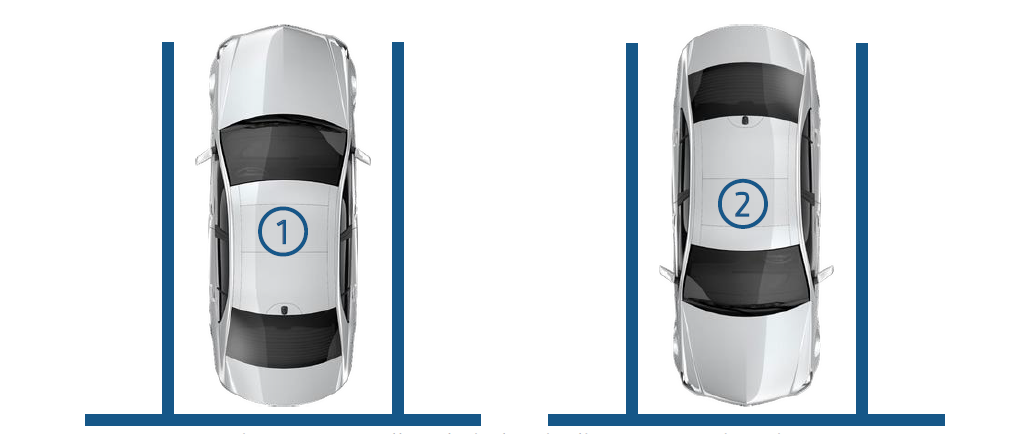
当传感器安装在地面上的车辆上(不适用于船只)时,使用简单的程序很容易估计滚动和俯仰偏差。
该程序适用于任何平面(不一定是水平的)。如果我们考虑一辆车,它包括:
- 将汽车反向停放在停车位上,然后在停车后测量横滚角和俯仰角。
- 将汽车向前停放在同一插槽上。测量横滚角和俯仰角。
- 在配置页面中使用平均横滚和平均螺距作为各自的横滚未对准和节距未对准设置。
然而,测量INS航向未对准要复杂得多。只要您可以保证您的车辆是非转向后轮的标准汽车,就可以使用几种方法来实现:
- 您应该首先在 INS 配置中输入测量的 roll 和 pitch 未对准角。
- 然后以50km/h以上的路段直线行驶,并确保不会漂移打滑。
- 使用平均滑移角值slip angle作为航向未对准的直接测量值。
- 您还可以使用FDI上位机自动估计和显示偏航,pitch和车辆旋转中心杠杆臂。