
# 杠杆臂 & 安装对齐校准
# Real-Time
惯性传感器配置和使用中的一个常见问题是正确设置 GNSS 杠杆臂和其他外部传感器安装参数:精确的杠杆臂(1 厘米以内)是确保最佳精度的关键。惯性传感器与双天线系统之间的角度也应精确测量在 0.05°以内,以确保正确的导航性能。
然而,除非使用全站仪,否则以如此精度测量角度和杠杆臂通常是不可行的。在具有挑战性的条件下,这种昂贵的解决方案可能无法解决短基线双天线和微型惯性传感器(典型的无人机设置)之间的小偏差。
为了克服这些问题,FDISystems 开发了高效的算法和程序来精确校准安装杠杆臂和小角度。通过此程序估计 GNSS 杠杆臂和 DVL 对准。
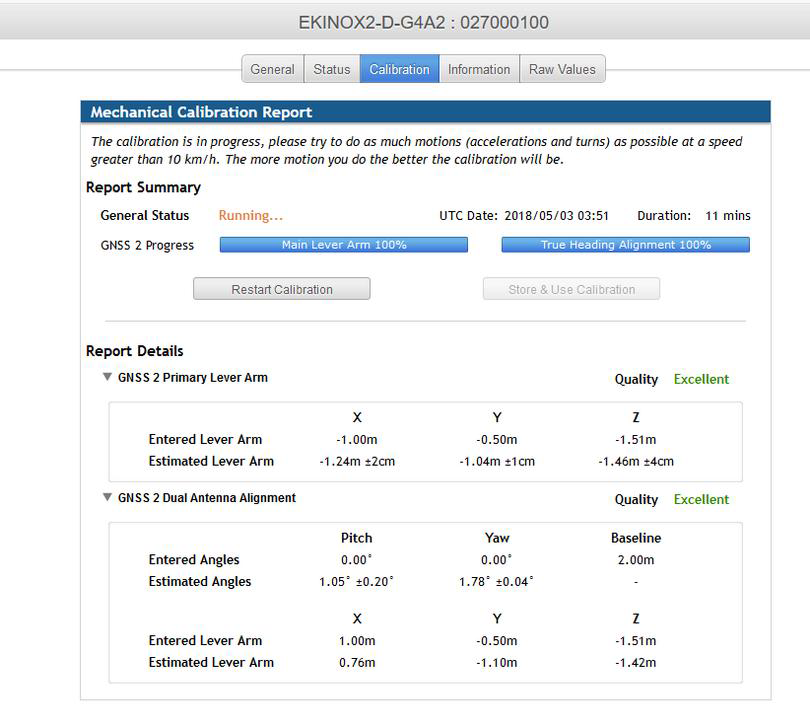
该过程可以在Qinertia后处理软件中执行,以获得最佳性能,或者通过集成的Web界面用于高性能导航系统(Ekinox、Apogee、Navsight、Quanta)。
实时和Qinertia 中的过程略有不同,但主要步骤如下:
1.输入粗略的“先验”配置,每个杠杆臂的精度为 10 厘米
2.运行校准序列,以比通常操作更高的动态来允许 EKF 观察各种杠杆臂和角度(通常通过八字形移动)。
3.使用Qinertia或使用实时校准接口计算精确的校准参数,并将这些参数应用到传感器非易失性存储器中
4.正常使用传感器,并通过精确的杠杆臂设置来确保高性能和稳健性
您可以点击[校准过程链接可用时]查看FDI系统高性能单元的实时校准过程。
在 Ellipse 系列上,默认操作包括自动杠杆臂估计,以便于设置。一旦通过Qinertia获得精细的参数,就可以停止这种自动杠杆臂估计,以实现最佳性能。
# Post-Processing
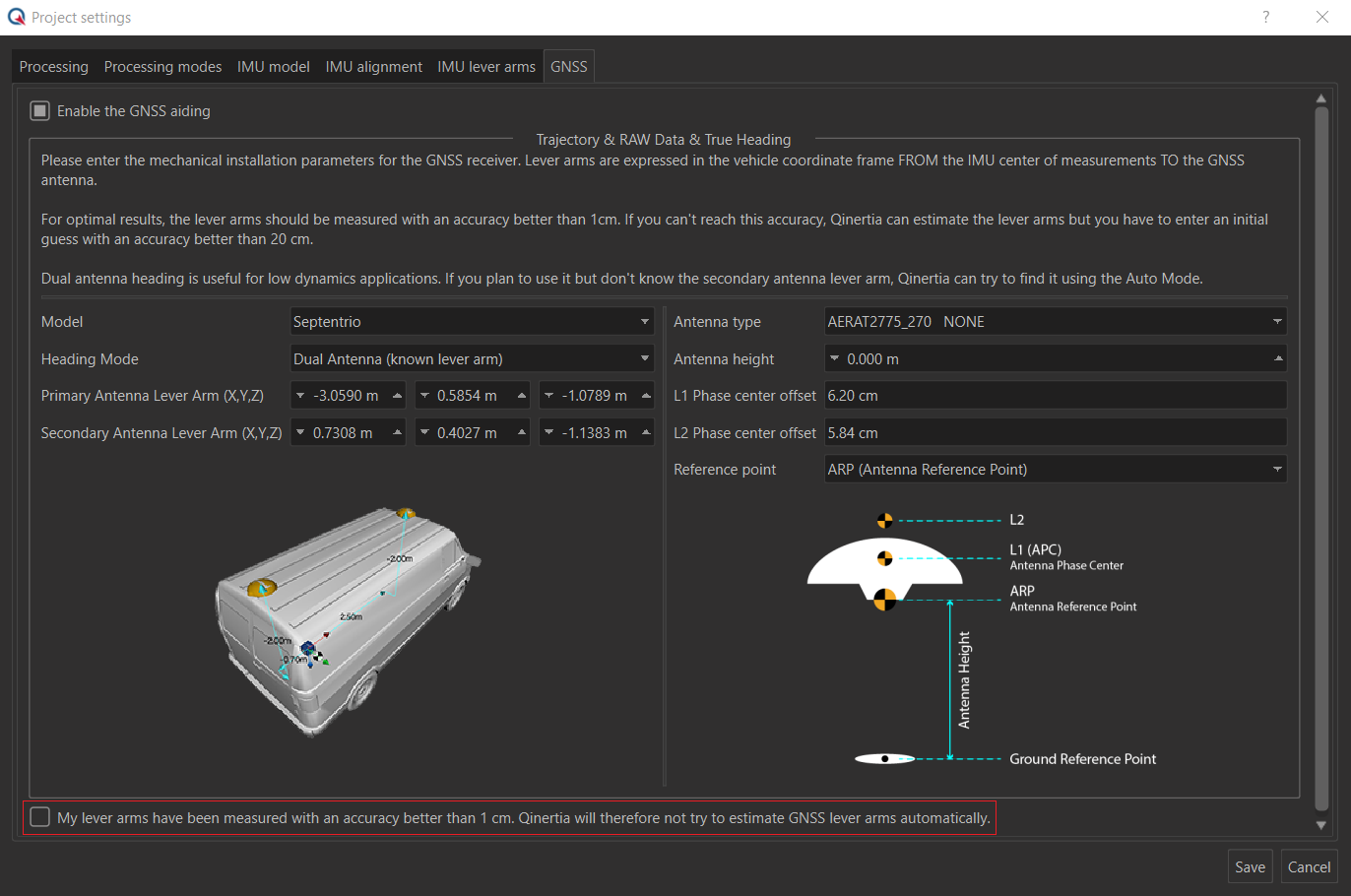
至于实时,可以使用 Qinertia 后处理软件估算杠杆臂和校准。Qinertia 为有效估算机械安装参数提供了市场上最好的解决方案。请阅读 Qinertia 用户手册中的专门文章以获取更多详细信息。
在 Qinertia 中,通过告诉 Qinertia 外部传感器杠杆臂未被准确测量,可以轻松完成此操作。必须取消选中 GNSS 配置窗口中的简单框:
下次 Qinertia 处理数据时,它将估计杠杆臂和两个天线之间可能的对齐方式。处理完成后,此估计将自动出现在窗口中,并显示与估计设置相比的当前设置。然后,您可以选择是否使用这些新设置并启动新处理。这些步骤可以多次完成以收敛到最佳杠杆臂,这通常是当当前杠杆臂等于估计的杠杆臂时。
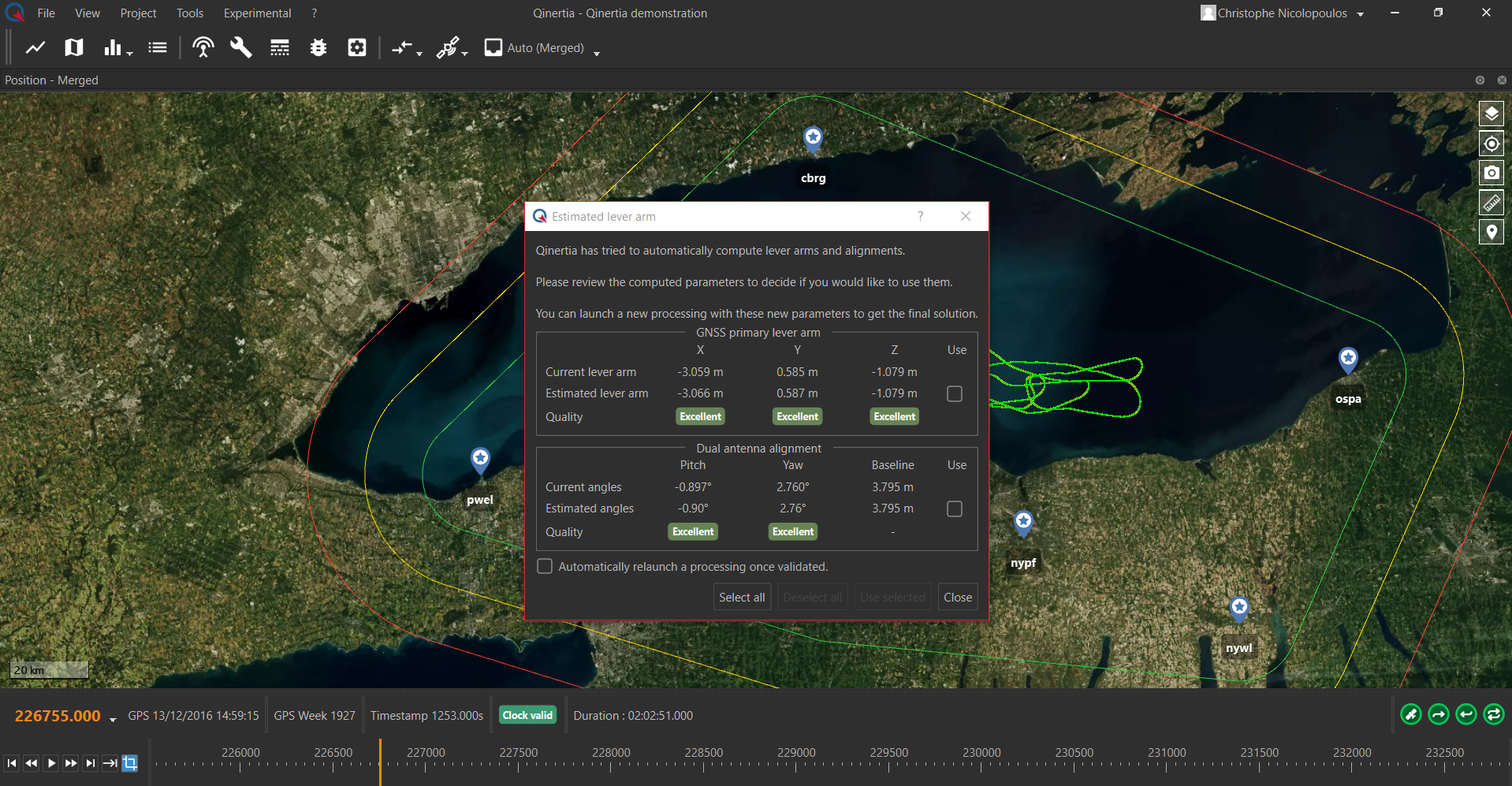
当然,与实时一样,在后处理中估计杠杆臂和对齐时需要考虑一些事项。与实时一样,拥有动态对于在3D中进行良好的估计非常重要。在PPK精度下执行此操作也很重要,以尽可能准确地测量这些杠杆臂。