
# 惯性传感器安装
# 标准安装
车辆坐标系中的正常方向是将传感器 X 轴与车辆前进方向对齐。 传感器 Z 轴应向下转动。 当无法进行这种机械对准时,必须测量相对于车辆坐标系的IMU错位,如本链接所述
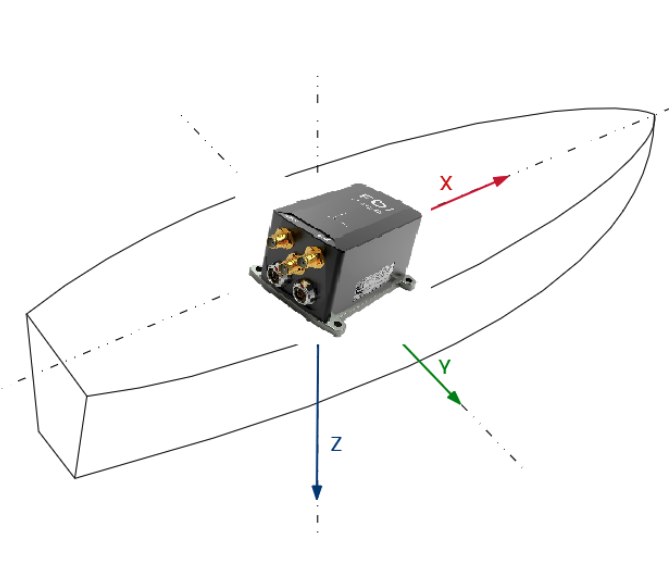
* IMU 在船舶应用中的典型放置*
作为经验法则,FDISYSTEMS传感器可以放置在车辆的任何地方。但是,在大型车辆或船只的情况下,我们建议将传感器放置在旋转中心周围10米范围内。
在任何情况下,传感器与中心或旋转之间的主要杠杆臂必须在5厘米精度内测量。它是从传感器到旋转中心的有符号距离,以车辆坐标系表示。
正确的测量将确保最佳性能,特别是在以下应用中:
● 海洋应用。升沉运动计算取决于良好的杠杆臂测量
● 汽车应用,其中主杠杆臂在内部使用,以考虑此类应用中假设的运动约束。
# 高振动考虑因素
FDI Systems设计的IMU具有高质量的MEMS传感器,结合了高采样频率以及高效的抗混叠FIR滤波器,以尽可能限制振动问题。尽管如此,良好的机械隔离将确保获得完整的传感器性能:
高振幅振动会导致加速度计读数偏差。得益于卓越的工厂校准,这种影响是有限的。然而,这是无法完全避免的。这种效应称为VRE(振动校正误差),来自内部加速度计非线性。
最终,非常强烈的振动会导致传感器饱和。观察到的偏差将急剧增加,导致方向上的巨大误差。
FDI Systems通常建议使用高加速度计范围,以降低大多数应用的VRE效应,但需要非常精确的加速度测量的船舶应用除外。
升沉和延迟升沉计算比其他算法对振动更敏感。使用升沉输出时,请注意尽可能降低振动水平,以实现全部性能。
# 磁力计
当使用内部磁力计作为航向参考时,应注意铁磁环境。
放置在设备附近的铁磁材料或磁铁会扭曲磁场,从而在磁力计读数中产生误差。大电流电源或相关电线也可能产生磁场。
传感器应尽可能远离铁磁材料放置,特别是那些可以相对于传感器独立移动的材料。在实践中,将设备放置在距离干扰材料 2 米以上的地方足以避免产生错误。
在大多数情况下,可以执行校准程序来映射磁失真,从而获得设备的全部性能。校准可以补偿硬铁和软铁干扰。
请参阅硬铁和软铁校准手册,了解有关此链接上的磁力计校准程序的更多信息 磁性校准
有些干扰是无法预测的:例如,磁铁突然经过设备附近或手机通信。
内部EKF能够应对短期磁干扰。最终,如果磁场方向长时间改变,航向将重新对齐到新的磁场方向。
不使用内部磁力计时,磁力对性能的影响较弱,但非常强的磁场会影响陀螺仪的性能,应避免这种高振幅的磁场。