
# 载体 & 传感器坐标系
# 载体坐标系
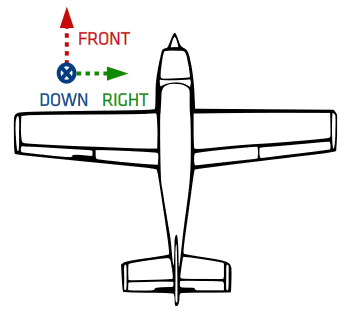
根据应用的不同,载体(车辆 body or vehicle) 坐标系定义如下:X轴指向正向,Z轴指向向下,Y轴,由于右手规则指向载体右侧。
# 传感器坐标系
此传感器(Sensor)坐标系连接到 IMU。
下图显示了默认配置的正文坐标框。在大多数情况下,Sensor坐标框架必须与载体坐标系对齐。如果传感器坐标框架无法机械对齐,则可以通过软件调整车辆中的传感器对齐。请点击查看有关此软件对齐 (opens new window) 的更多详细信息。
# 测量原点
我们已经定义了传感器轴的方向,但我们还需要知道这个坐标框架的原点在哪里。此坐标系原点是三个加速度计的交点,对应于速度和位置测量的中心。
在测量杠杆臂时必须考虑这个来源。
FDISYSTEMS传感器产品机械图纸中的圆形黑白符号定义并定位了该测量的原点。