# ROS
FDILink_ROS_例程用户使用手册
# 1.简介
为了帮助用户在 ROS 系统中更快速地部署他们的机器人项目,我司提供了详细的 ROS 节点数据发布例程,使用户能够轻松地在 ROS 中实现惯导产品的信息发布。 ROS(Robot Operating System)是当前机器人操作系统的主流系统,通过我们提供的优化例程,用户可以更方便地利用 ROS 的强大功能,快速构建并运行他们的机器人应用。
# 2. 使用方法
# (1) 地面站配置数据输出
① 在Win系统中通过FDI地面站上位机配置串口发布数据,注意:此配置是保证模块的串口可以正常发布您所需要的特定数据包,出厂时只默认打开了部分数据包。具体数据包的对应关系可以参考用户使用手册的Fdilink协议部分。
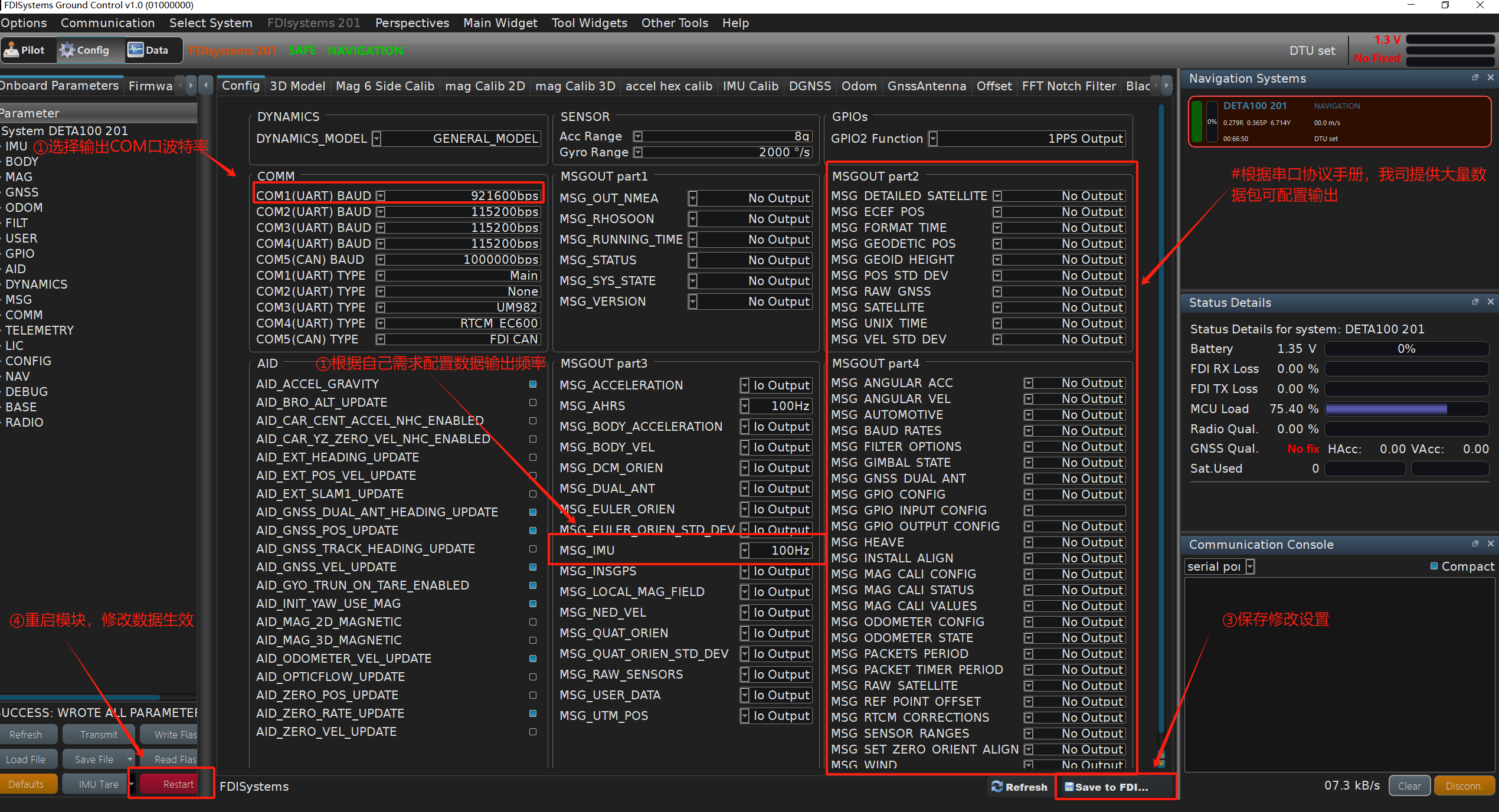
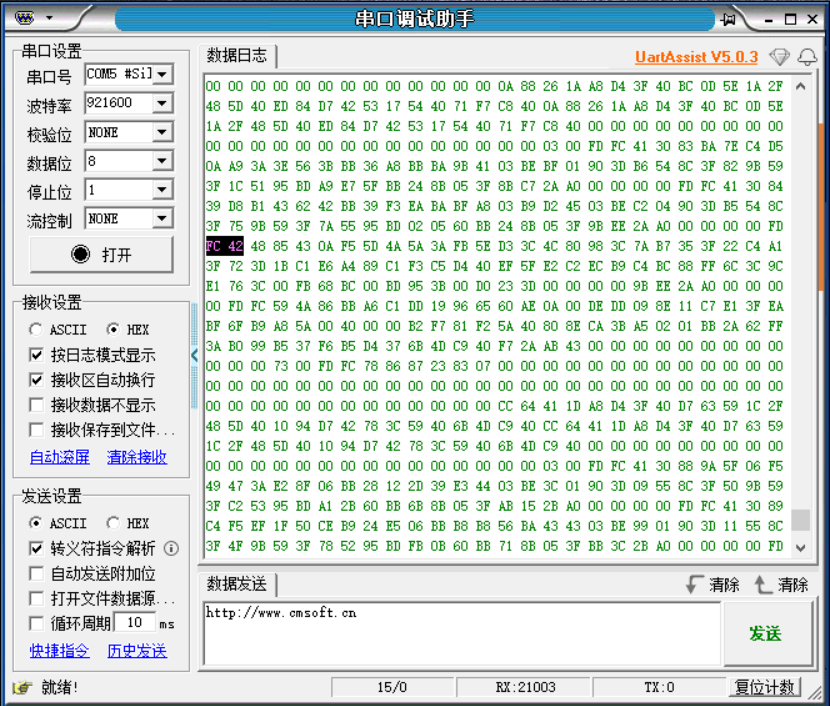
② 如果正常配置,保存并重启设备,此时可以通过win系统下的串口助手查看到以FC开头,第二字段为具体数据包ID的16进制数据发布。
# (2) ubantu中配置串口权限

① 连接Imu后,打开终端,通过cd命令进入例程所在文件夹。
② 终端输入命令以显示端口号:ls -l /dev/ttyUSB*。
③ 赋予权限:imu_serial_port*: IMU传感器连接的串口号,每次连接上时需要给该端口赋予权限,运行指令如下:sudo chmod 777 [imu_serial_port]
④ 输入uabntu系统密码后ROS端便可以收到串口的实时数据。
# (3) 安装依赖项
① ros melodic 版本:sudo apt-get install ros-melodic-serial
② ros kinetic 版本:sudo apt-get install ros-kinetic-serial
# (4) 编译ROS例程文件
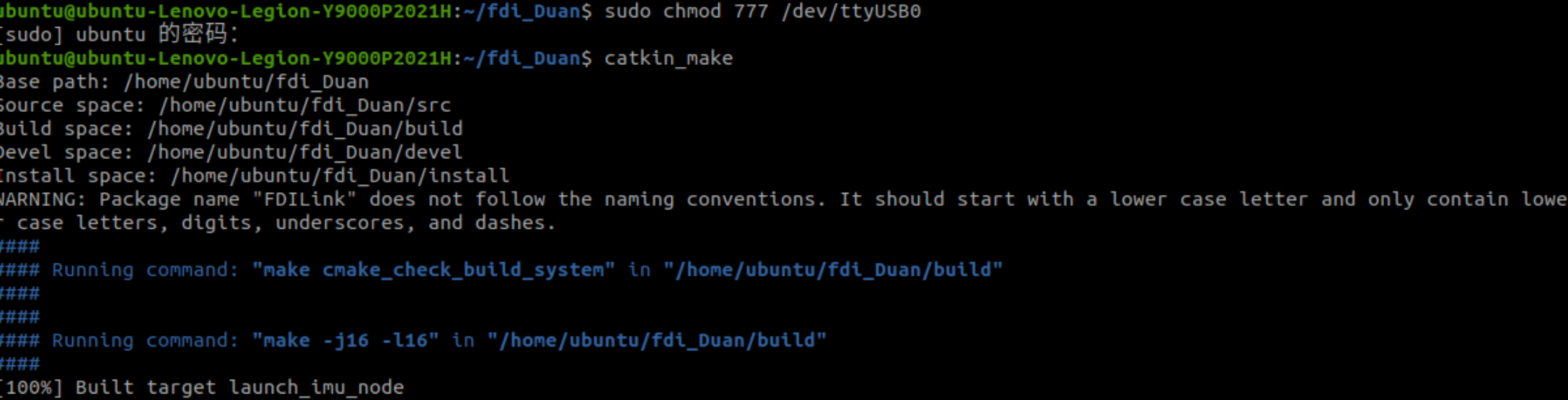
① 终端在例程指定文件后输入catkin_make 命令以编译例程。
② 编译通过后会提示[100%] Built target launch imu node命令
# (5) 启动IMU例程

① source catkin_ws/devel/setup.bash
② roslaunch FDILink launch_imu.launch
# 3. 测试效果
(1) 经过以上操作例程正常运行后,在终端界面会实时打印串口接收到的数据。
# 4. 注意事项
(1) 目前在ROS1例程中,我司只示例性编写了FDILink数据协议中部分数据包信息。
| ROS例程示例接收数据包 | |||
|---|---|---|---|
| 序号 | Packet_ID | 说明 | 备注 |
| 1 | 0x40 | MSG_AHRS | 主要姿态信息 |
| 2 | 0x42 | MSG_INS/GPS | NED坐标系位置信息 |
| 3 | 0x59 | MSG_RAW_GNSS | 单天线卫星数据 |
| 4 | 0x78 | MSG_GNSS_DUAL_ANT | 双天线卫星数据 |
(2)如果用户需要额外的数据包数据,可通过在Win系统下配置好数据输出后,在ROS例程代码中的main.cpp文件中按照例程接收方式增加对应数据包的类和接收数据部分代码。