# 陀螺仪
# Definition
陀螺仪是一种测量惯性系旋转速率的传感器。
因此,当它旋转时,它将测量所有后续的方向变化。 由于地球坐标系正在旋转,躺在地面上的陀螺仪也将测量地球自转率(约15°/小时)。
陀螺仪输出通常以 °/s, 或者 rad/s表示。
# 如何使用陀螺仪
可以在高频下对陀螺仪测量得到的角速度积分,以精确测量传感器方向。该原理用于所有惯性传感器(垂直陀螺仪,AHRS,MRU,INS)的基础。
它们还用于惯性导航系统(INS)中的导航(位置和速度)确定。
最高性能的陀螺仪(通常基于闭环FOG)非常精确,可以在没有任何偏差估计的情况下测量地球自转,并在没有任何外部航向参考的情况下确定航向。这些传感器被称为陀螺罗经。还有许多其他技术可以在不进行纯陀螺罗经的情况下测量航向,这允许释放对陀螺仪技术的限制。
# 原理
FDI Systems 陀螺仪使用2个原理来测量旋转:
# 科里奥利效应
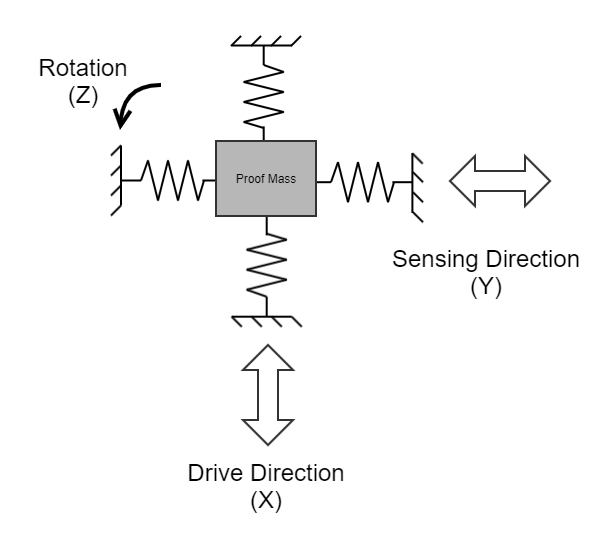
MEMS陀螺仪使用科里奥利效应。当证明质量在X方向上振动时,在垂直轴Z上的旋转将产生力,从而在垂直轴Y上引起相应的运动。 有几种MEMS架构,通常基于振动梁或振动环。实际陀螺仪性能可能因MEMS元件尺寸和质量、传感器封装、机械和信号处理而异。
在制导、导航和控制 (GNC) 系统中,有时需要高性能或高端陀螺仪。此类陀螺仪在无辅助导航性能和通过陀螺罗盘确定航向方面提供了独特的功能,而这是当今 MEMS 陀螺仪技术所不可能实现的。此类高端陀螺仪中最常见的是光学陀螺仪,用于具有最严格性能要求的应用。
# 萨格纳克 Sagnac 效应
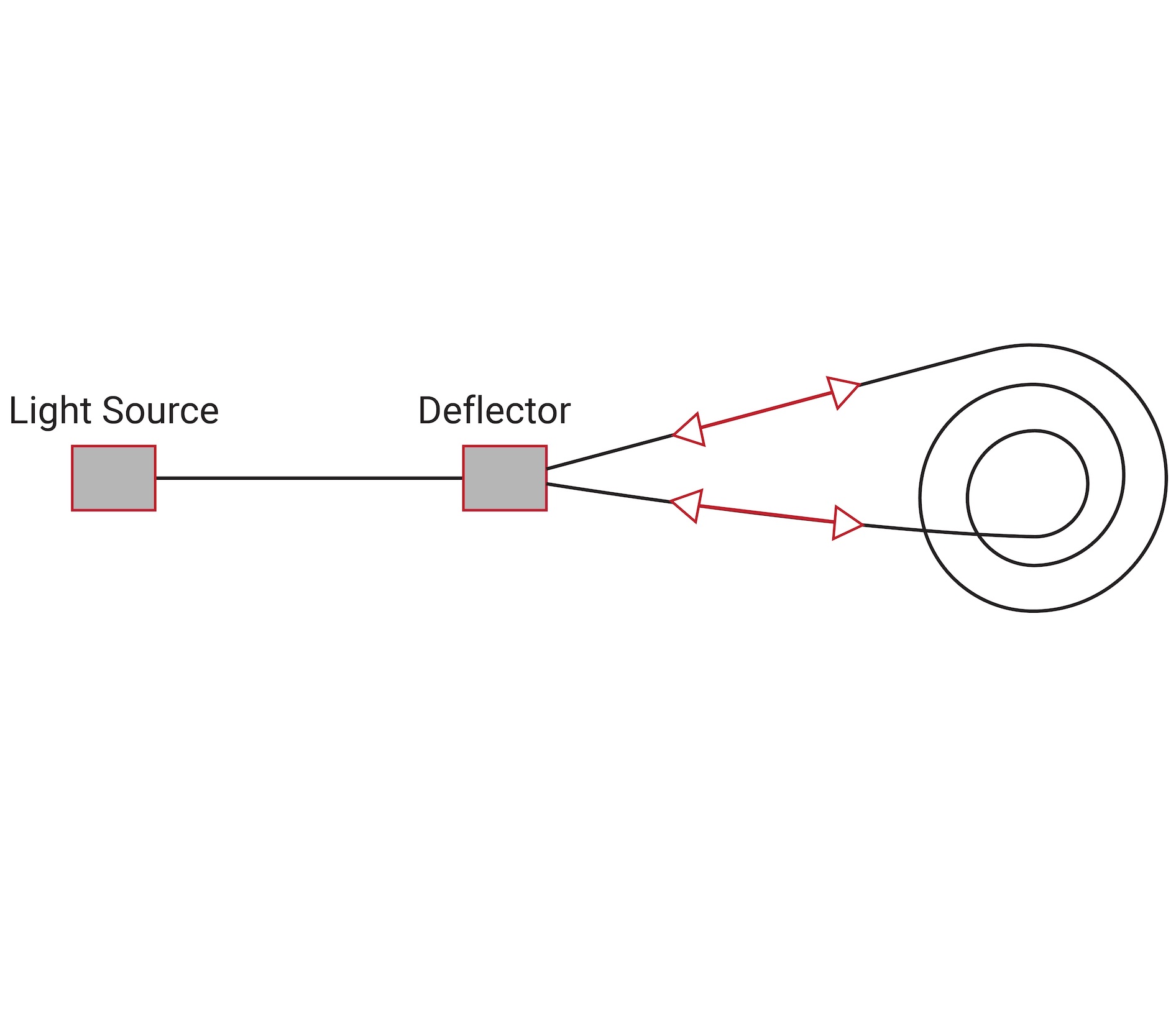
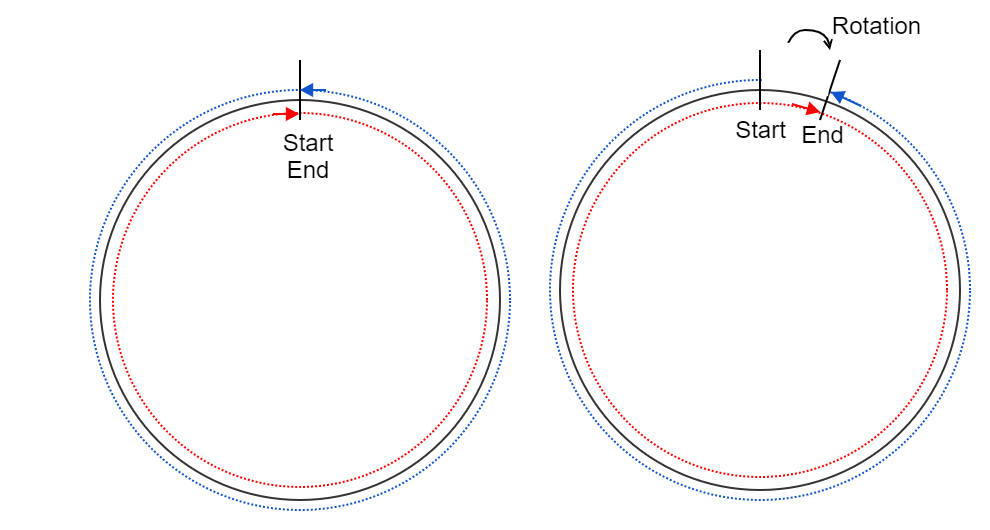
这种效应用于光学陀螺仪,如光纤陀螺仪(FOG)。 两个光源以相反的方向循环:一个顺时针,另一个逆时针。当没有旋转时,来自两个光源的光同时到达,但是如果有旋转,其中一条路径会更长,另一条路径会更短。这将产生可以观察到的干扰以扣除角速度。
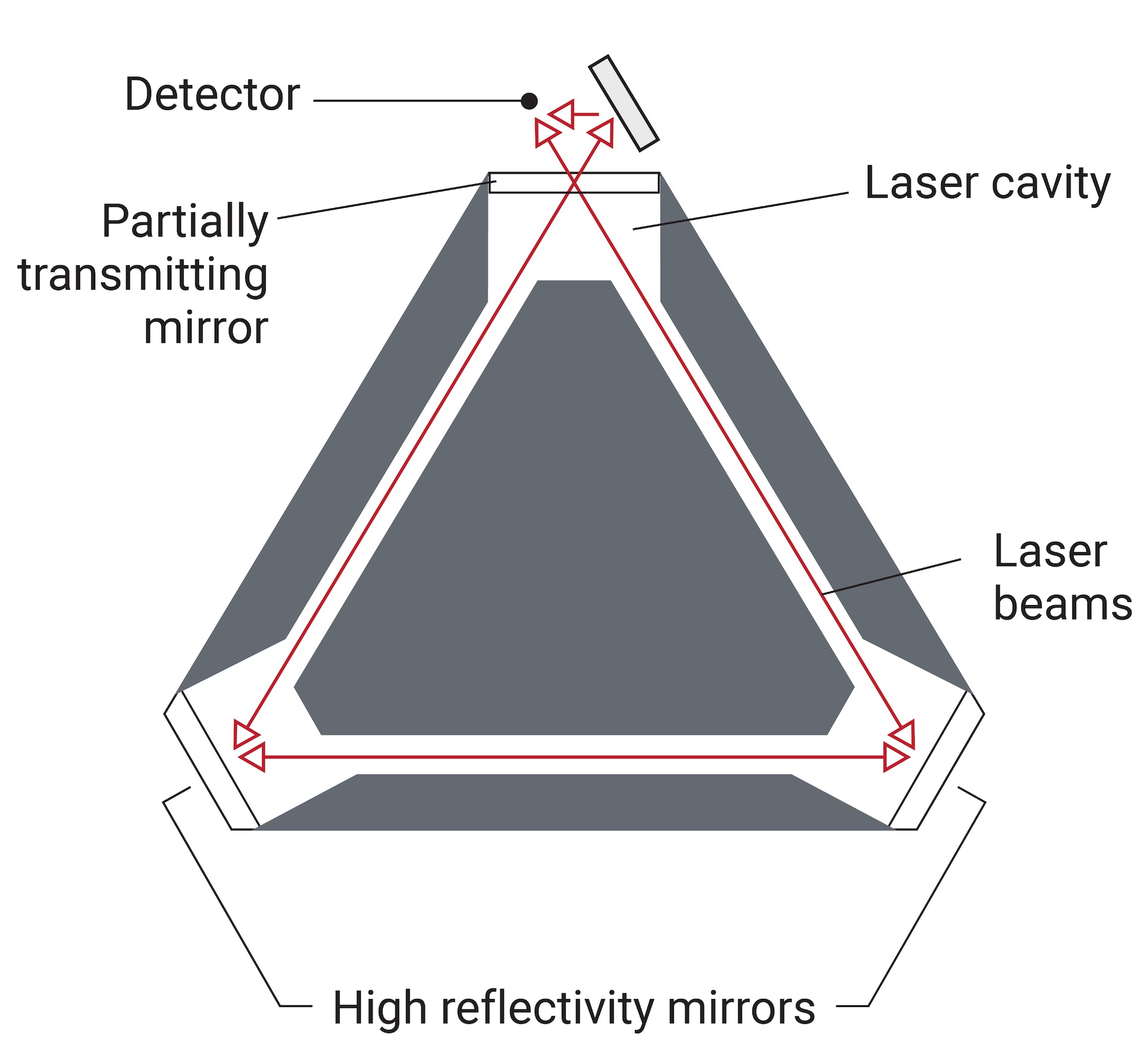
# 环形激光陀螺仪
环形激光陀螺仪(RLG)是一种高性能光学陀螺仪,利用萨尼亚克效应来检测旋转。如图下所示,RLG 利用闭环激光腔(通常充满氦氖气)来执行测量。激光器本身集成在腔室内,使得外部观察到的干涉图案与旋转角度成正比。这些陀螺仪是目前性能最高的陀螺仪,加上其复杂性,也使其成为最昂贵的陀螺仪。