# 惯性&导航传感器
惯性测量单元(IMU)是所有惯性系统的核心。
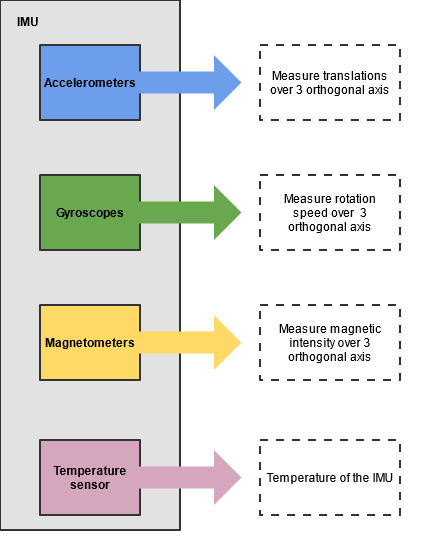
IMU自由度通常反映了传感器轴的数量:
- 3 DOF for a gyro triad
- 6 DOF for a full IMU with 3 accelerometers and 3 gyroscopes
通过计算磁测量,有时包括磁力计在内的IMU被宣传为9自由度。然而,在实际情况下,磁场与设备的方向直接相关,因此6 DoF仍然代表带有磁力计的IMU。
为了获得最佳性能,如果在IMU中应用温度校准,还需要温度传感器。
在本节中,您将了解有关这些传感器和MEMS技术的更多详细信息。