
# Orion9规格

# 导航规格
| NAVIGATION | AHRS | D/D4G/DP900 | D4G-AIR/DP900-AIR |
 |  |  | |
| 俯仰 / 横滚 | 组合导航2 0.01° | 组合导航2 0.0025° | 组合导航2 0.0025° |
| 纯惯导保持 0.01°/h | 纯惯导保持 0.01°/h | 纯惯导保持 0.01°/h | |
| 航向 | / | 陀螺罗盘对准1 0.05° sec(latitude) | 陀螺罗盘对准1 0.05° sec(latitude) |
| / | 组合导航2 0.05° Single point 0.01° RTK dual GNSS (> 2 m baseline) | 组合导航2 0.05° Single point 0.01° RTK dual GNSS (> 2 m baseline) | |
| 纯惯导保持 0.01°/h | 纯惯导保持 0.01°/h | 纯惯导保持 0.01°/h | |
| 位置 | / | 组合导航3 Single point: 1.5 m RTK: 0.8 cm + 1 ppm (option) | 组合导航3 Single point: 1.5 m RTK: 0.8 cm + 1 ppm (option) |
| / | 纯惯导4 < 1 nmi/h (=1852 m/h) | 纯惯导4 < 1 nmi/h (=1852 m/h) | |
| 舰艇 Heave 升沉5 | / | 2 cm | 2 cm |
| 速度 | / | 组合导航 0.02 m/s | 组合导航 0.02 m/s |
| / | 纯惯导4 0.5 m/s | 纯惯导4 0.5 m/s | |
| 机载大气估计系统6 | / | / | 空速 0.1 m/s 攻角侧滑角精度:0.1° |
表 ORION9 导航规格
1. Sec(latitude) = 1 / cosine(latitude) 粗对准时间 60 s,精对准时间 300 s 内完成。
2. Single point 需要具备 GNSS(1 米标准差)导航功能,持续时间至少 30 分钟,期间需包含至少两次转向,每次转向角度不少于 60°。
3. RTK 差分固定解厘米级定位模式需要充分运动、良好的 GNSS 接收条件以及 RTCM 输入。
4. 精对准或者充分运动对准后,GNSS 失锁、无 NHC 辅助时,可进行纯惯性 3D 轨迹推算。
5. 海洋船舶版本支持 DVL 接入,具有升沉、横摇、纵摇位置速度输出。
6. 航空版本具有气压高度计和空速传感器。
2. Single point 需要具备 GNSS(1 米标准差)导航功能,持续时间至少 30 分钟,期间需包含至少两次转向,每次转向角度不少于 60°。
3. RTK 差分固定解厘米级定位模式需要充分运动、良好的 GNSS 接收条件以及 RTCM 输入。
4. 精对准或者充分运动对准后,GNSS 失锁、无 NHC 辅助时,可进行纯惯性 3D 轨迹推算。
5. 海洋船舶版本支持 DVL 接入,具有升沉、横摇、纵摇位置速度输出。
6. 航空版本具有气压高度计和空速传感器。
说明
如果您计划使用orion内部磁力计,请确保不要使用铁磁性材料来安装设备,并在安装完成后进行磁力计校准。
- 陀螺罗盘对准精度与纬度相关,彩页中写法为
0.05° sec(latitude),其中Secant latitude = 1 / cosine(latitude)。 - 组合导航精度依赖 GNSS 辅助条件,RTK 双天线航向精度基于大于 2 m 基线。
- 位置组合导航精度来自彩页规格总表。
- 纯导航位置漂移按彩页中的
nmi/h形式保留。 - 升沉精度适用于舰艇应用场景。
# 传感器规格
| SENSOR | 石英加速度计 | FOG陀螺 | 磁力计 | 气压计 | 空速管 |
| 量程 | ±20 g | ±800 °/s | ±800 uT | 300-1200 hPa | 1 - 30 PSI |
| 零偏稳定性(10 s, 1σ) | 15 ug | 0.01°/h | 20 nT | 60 Pa | ±0.25 %FSS |
| 零偏重复性(1σ) | 15 ug | 0.01°/h | / | / | / |
| 刻度因子重复性(1σ) | 20 ppm | 10 ppm | / | / | / |
| 刻度因子非线性(1σ) | 20 ppm | 10 ppm | / | / | / |
| 带宽 | 500 Hz | 500 Hz | 200 Hz | 100 Hz | 100 Hz |
航空版本具有气压高度计和空速传感器。
磁力计说明
- orion猎户系列光纤惯导,内部具有可以敏感地球自转的高精度光纤陀螺仪石英加速度计,可以通过粗对准和精对准完成高精度的航向初始化。
- 磁力计仅在磁环境良好的环境内,提供初始对准和长期辅助使用。
- 未进行磁软磁硬磁校准或者磁环境干扰大的场景会降低系统导航精度,谨慎打开磁辅助开关。
表 ORION9 传感器规格
# 内置 GNSS 规格
# 多星座多频RTK双天线定位定向(可以定制纯北斗)
| INTERNAL GNSS | D4G/Dp900 |
| Engine, update rate | 1408通道;BDS/GPS/GLONASS/Galileo/QZSS |
| 天线频点 |
主天线:BDS: B1I, B2I, B3I; GPS: L1C/A, L2P(Y)/L2C, L5; GLONASS: L1, L2; Galileo: E1, E5a, E5b; QZSS: L1, L2, L5 从天线:BDS: B1I, B2I, B3I; GPS: L1C/A, L2C; GLONASS: L1, L2; Galileo: E1, E5b; QZSS: L1, L2 |
| Cold start / Hot start | < 30 s / < 5 s |
| 高度限制 / 速度限制 | 50,000 m / 500 m/s |
表 ORION9 内置 GNSS 规格
# 增强抗干扰 GNSS 模块规格(选配)
# 干扰防欺诈GNSS RTK双天线定位定向
| Parameter | Value |
| 通道数 | 789 hardware channels |
| GNSS technology | GPS: L1 C/A, L1C, L2C, L2P(Y), L5;GLONASS: L1CA, L2CA, L2P, L3 CDMA;BeiDou: B1I, B1C, B2a, B2I, B2b, B3I;Galileo: E1, E5a, E5b, E6;QZSS: L1 C/A, L1C, L2C, L5, L6B |
| 抗干扰特性 | AIM+ advanced multipath mitigation、LOCK+ superior tracking robustness、IONO+ ionospheric disturbance protection、RAIM+ autonomous integrity monitoring |
| Performance | Value |
| RTK horizontal accuracy | 0.6 cm + 0.5 ppm |
| RTK vertical accuracy | 1 cm + 1 ppm |
| Initialization time | 7 s |
| Standalone accuracy(horizontal / vertical) | 1.2 m / 1.9 m |
| DGNSS accuracy(horizontal / vertical) | 0.4 m / 0.7 m |
| Velocity accuracy | 3 cm/s |
| Speed limit | 600m/s |
| GNSS attitude accuracy | 1 m antenna separation: Heading 0.15° / Pitch-Roll 0.25° 5 m antenna separation: Heading 0.03° / Pitch-Roll 0.05° |
| Maximum update rate | Position 20 Hz; |
| Latency | < 10 ms |
| Time precision | PPS resolution 1.4 ns;Event accuracy < 3 ns |
| Time to first fix | Cold start < 35 s;Warm start < 10 s;Re-acquisition 1 s |
| Tracking performance(C/N0 threshold) | Tracking 20 dB-Hz;Acquisition 30 dB-Hz |
表 抗干扰 GNSS 模块规格
# 电气规格
# 供电规格
| Parameter | Orion9-A | Orion9-D/D4G/DP900 | Orion9-D4G/DP900-AIR |
| 输入电压 | 12-48 V | 12-48 V | 12-48 V |
| 功耗 | Max 25 W(典型 13 W@25℃) | Max 25 W(典型 13 W@25℃) | Max 25 W(典型 13 W@25℃) |
表 ORION9 供电规格
# 通讯规格
# 输入 / 输出与控制
| 类别 | 参数 | 规格 |
| 输入 / 输出 | 协议 | FDILink Binary、FDILink ASCII、NMEA0183/2000、RTCM、DroneCAN |
| 支持输入 | 陀螺(NAV、Pitch、Roll)四元数、位置、速度、时间;空速、攻角、侧滑角、风速矢气估计系统数据 | |
| 控制 | 串口 | RS232 x 2 路 & RS422 x 1 路,最高 921600 bps |
| USB | USB x 1 路(log) | |
| CAN | CAN 2.0A/B x 2 路,最高 1 Mbps | |
| Ethernet | 10 Mbit - UDP / TCP server / TCP client / web-server(GUI)/ FTP synchro / 日志 | |
| 同步接口 | GPIO*2 路(可编程)/ Sync*1 路 / PPS*2 路(TTL5V)继电*1 路 / NanoSIM卡(内置) |
表 ORION9 输入/输出与控制规格
# 数据与辅助能力
| 类别 | 参数 | 规格 |
| 输出数据 | 基础数据 | 姿态角、四元数、比力、陀螺零偏、温度、速度、位置 |
| 扩展数据 | 方向余弦矩阵、加速度/角速度原始数据、星质量数据 | |
| 数据频率 | 导航输出 | 500 Hz,1000 Hz(IMU data) |
| 融合引擎 | 算法 | 自适应非线性 Sigma-point 卡尔曼滤波器 |
| 外部辅助 | 里程计 / DVL / 激光 / SLAM | 里程计、DVL、雷达、双目、激光、摄像头、SLAM 等 PVA 辅助 |
| 用户配置 | 支持串行滑台配置、磁自动标定、静态对准 | |
| 数据同步 | 时间基准 | Sync-In、Sync-Out、I/O pins、GNSS PPS、30 ns RMS、60 ns 99% |
| 计时精度 | 时间 | 0.1 ppm,< 0.5 ps/s 漂移补偿 |
表 ORION9 数据与辅助能力
# 环境规格
| Parameter | Value |
| 日志存储 | Logging Capacity: 8 GB or 48 h @ 200 Hz |
| 环境 | -40℃ to +60℃ / -40℃ to +80℃ |
| MTBF(估算) | 50,000 h |
| Shock limit | 80 g @ 20 ms |
| 防护等级 | IP68 / 10 m 防护 |
表 ORION9 环境规格
# 结构规格
# 机械概览
| Parameter | Orion9-A | Orion9-D/D4G/DP900 | Orion9-D4G/DP900-AIR |
| 尺寸(mm) | 190 x 179 x 109 | 190 x 179 x 109 | 190 x 179 x 109 |
| 重量 | 3.5 kg | 3.6 kg | 3.6 kg |
| 外壳 | 全系列铝型腔体,航空插头 | 铝合金氧化坚固外壳 | 航空插头 |
表 ORION9 机械概览
注意
如果您计划使用 orion 内部磁力计,请确保不要使用铁磁性材料来安装设备。
# 设备机械对齐
# 结构图纸
# orion9-A 尺寸图
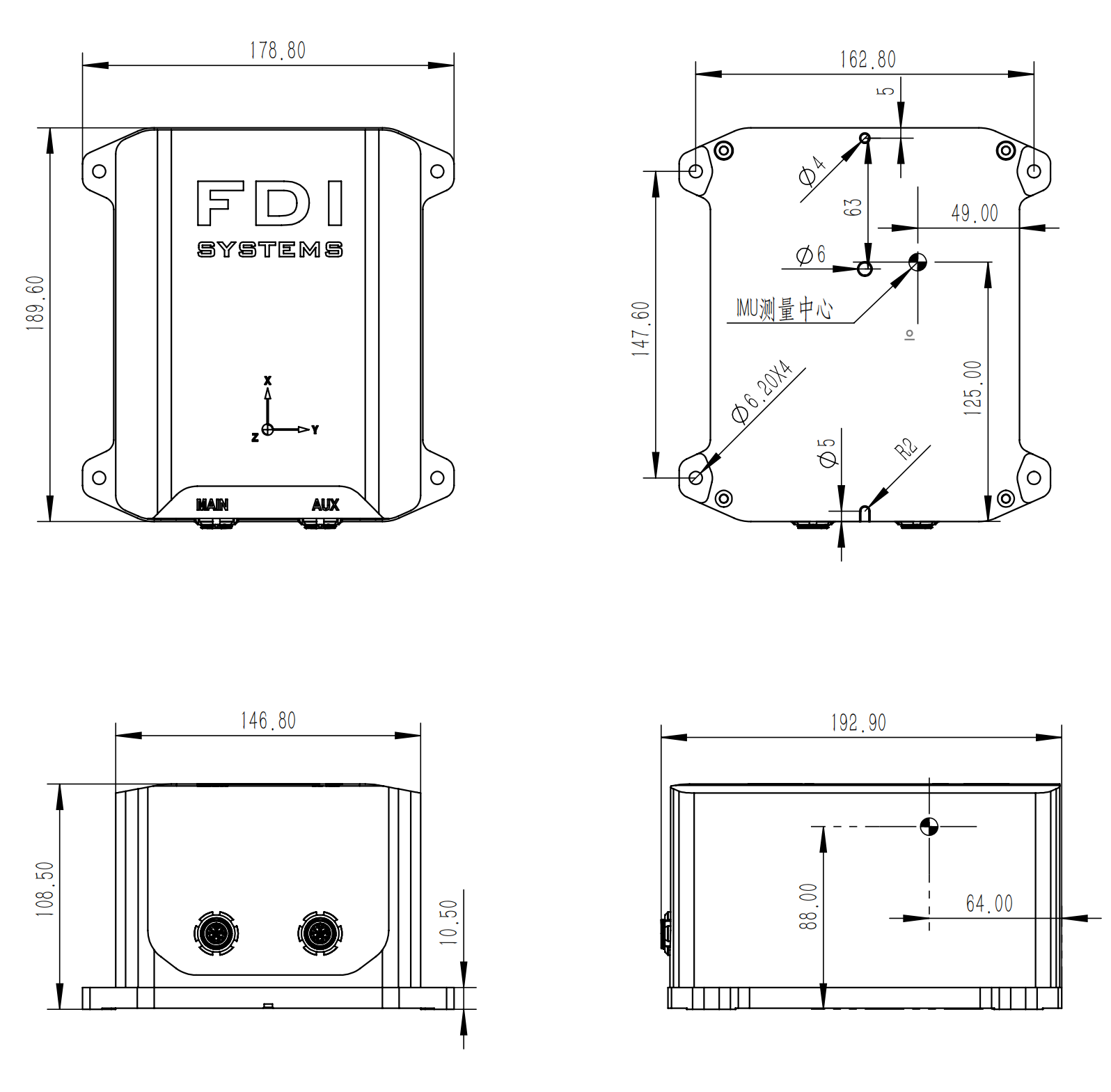
orion9-A 尺寸图
# orion9-D4G/Dp900 尺寸图
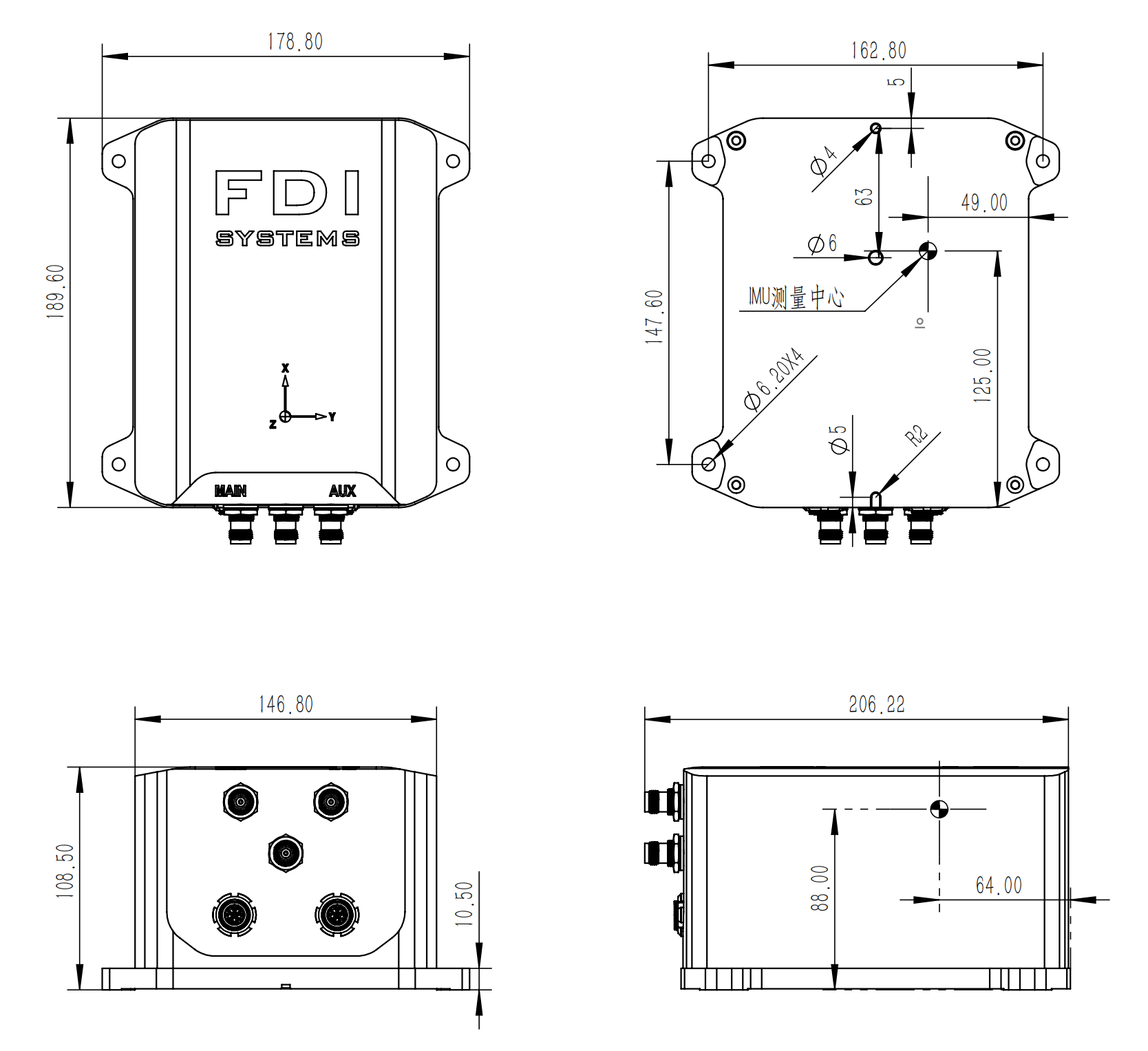
orion9-D 尺寸图
# orion9-Air 尺寸图
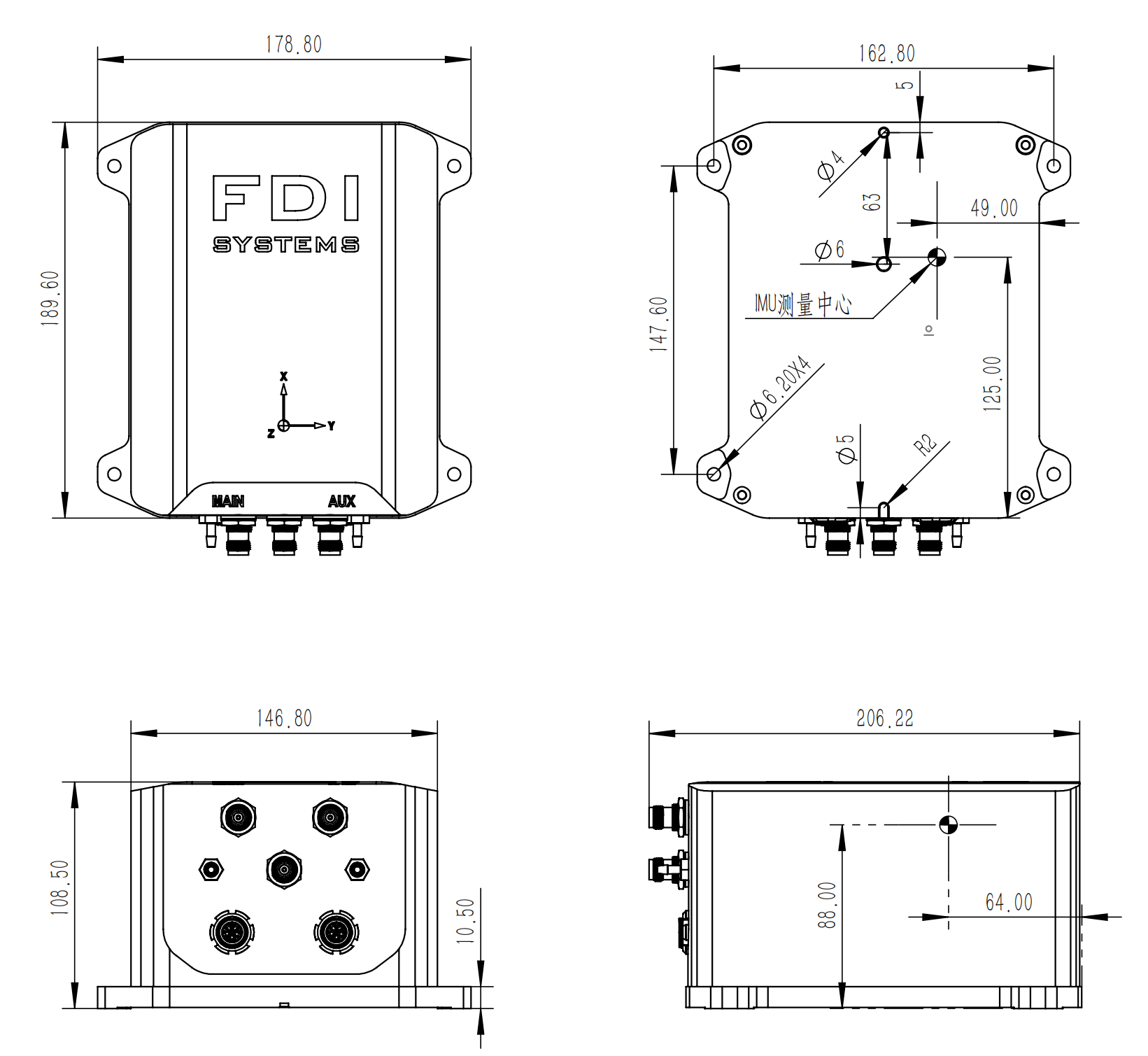
orion9-AIR 尺寸图
# Orion 3D STEP 模型
Orion 系列 Rugged STEP File:
| 型号 | 外形 | STEP |
|---|---|---|
| orion9-A | | Orion9-A Rugged STEP File |
| orion9-D4G | | Orion9-D4G Rugged STEP File |
| orion9-D4G-Air | | Orion9-D4G-Air Rugged STEP File |
# 接口部分
# 接口定义
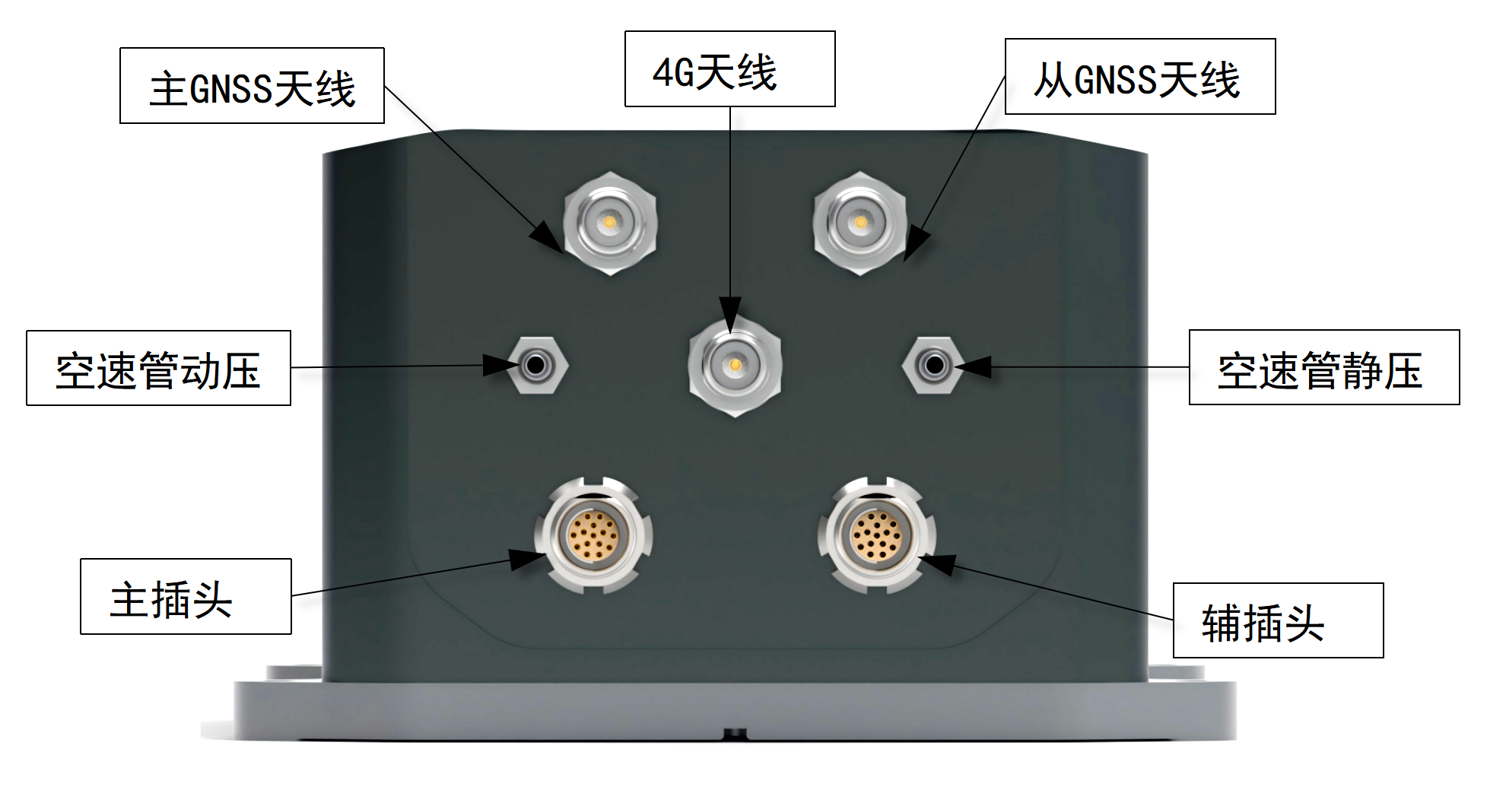
接口定义
# 主航插接头引脚
| Pin | Colour | Function | Primary DB9-1 | Auxiliary DB9-2 | 422 DB9-1 | CAN DB9-1 | GPIO DB9-3 | Power DC | 备注 |
| 1 | 黑 | GND | 5 | 5 | 5 | 5 | Ring | 12-48电源 | |
| 2 | 棕 | Power | Tip | ||||||
| 3 | 红 | Primary RS232 Tx | 2 | 主接口RS232 | |||||
| 4 | 白 | Primary RS232 Rx | 3 | ||||||
| 5 | 粉 | Auxiliary RS232 Tx | 2 | 辅接口RS232 | |||||
| 6 | 灰 | Auxiliary RS232 Rx | 3 | ||||||
| 7 | 绿白 | RS422Y T+ | 1 | RS422发送差分对 | |||||
| 8 | 蓝白 | RS422Z T- | 2 | ||||||
| 9 | 紫白 | RS422B R+ | 3 | RS422接收差分对 | |||||
| 10 | 橙白 | RS422A R- | 4 | ||||||
| 11 | 红白 | CAN H | 2 | CAN总线 | |||||
| 12 | 黑白 | CAN L | 3 | ||||||
| 13 | 蓝 | GPIO 1 | 2 | 1pps秒脉冲422差分电平输出 | |||||
| 14 | 浅绿 | GPIO 2 | 3 | 1pps秒脉冲TTL电平 | |||||
| 15 | 橙 | SYNC | 6 | SYNC同步信号 | |||||
| 16 | 黄 | GND | 1 | 信号地 |
表 11:主航插接头引脚
# 辅航插接头引脚
| Pin | Colour | Function | Primary DB9-1 | Auxiliary DB9-2 | ETH DB9-3 | CAN DB9-4 | GPIO DB9-3 | PowerDC | 备注 |
| 1 | 黑 | GND | 5 | 5 | 5 | 5 | Ring | 12-48电源 | |
| 2 | 棕 | Power | Tip | ||||||
| 3 | 红 | USB DM | 2 | USB用于LOG文件的读取 | |||||
| 4 | 白 | USB DP | 3 | ||||||
| 5 | 粉 | SWD_IO | 2 | 预留备用 | |||||
| 6 | 灰 | SWD_CLK | 3 | ||||||
| 7 | 绿白 | ETHERNET_TXD+ | 1 | 以太网发送差分对 | |||||
| 8 | 蓝白 | ETHERNET_TXD- | 2 | ||||||
| 9 | 紫白 | ETHERNET_RXD- | 3 | 以太网接收差分对 | |||||
| 10 | 橙白 | ETHERNET_RXD+ | 4 | ||||||
| 11 | 红白 | CAN2 H | 2 | CAN总线 | |||||
| 12 | 黑白 | CAN2 L | 3 | ||||||
| 13 | 蓝 | PPS+ | 2 | 1pps秒脉冲422差分电平输出 | |||||
| 14 | 浅绿 | PPS- | 3 | ||||||
| 15 | 橙 | PPS | 6 | 1pps秒脉冲TTL电平 | |||||
| 16 | 黄 | GND | 1 | 信号地 |
表 12:辅航插接头引脚
← orion9评估套件和配件 结构规格 →