
# 如何比较IMU
市场上的传感器都具有数据手册,其中包括以下全部或部分规格。如果数据表上存在这些规格,那么了解每个规格的含义非常重要,因为这是选择IMU的关键。
# 满刻度
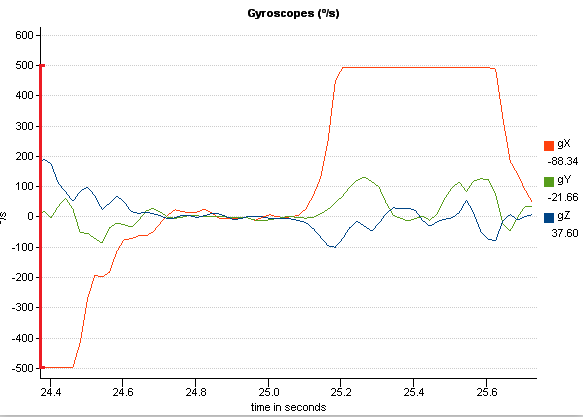
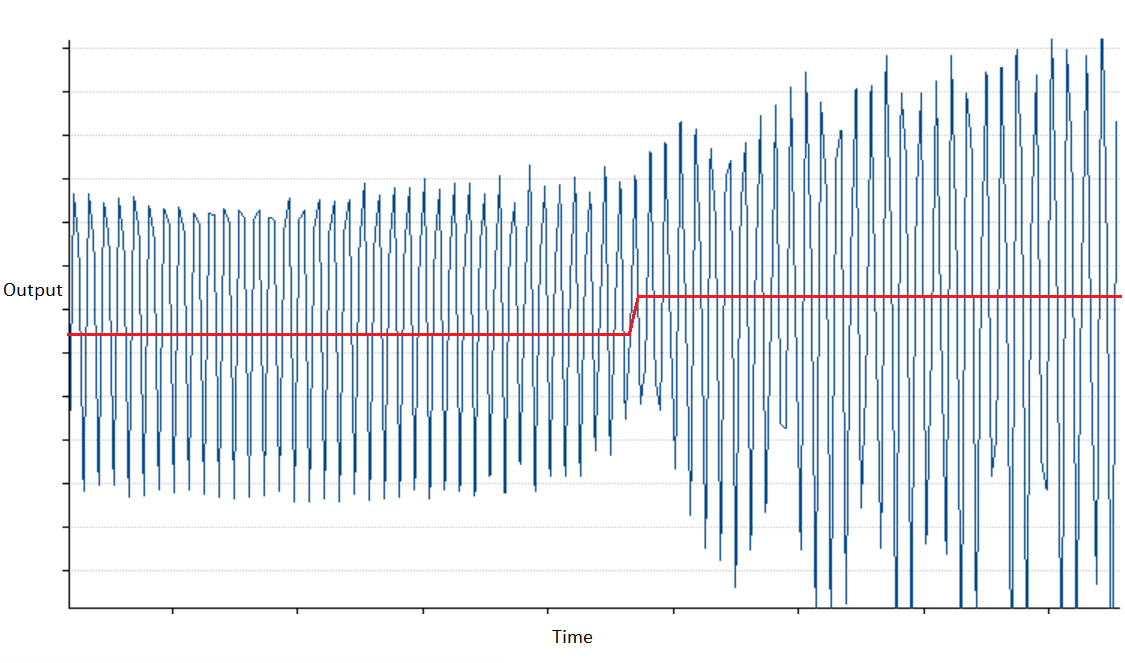
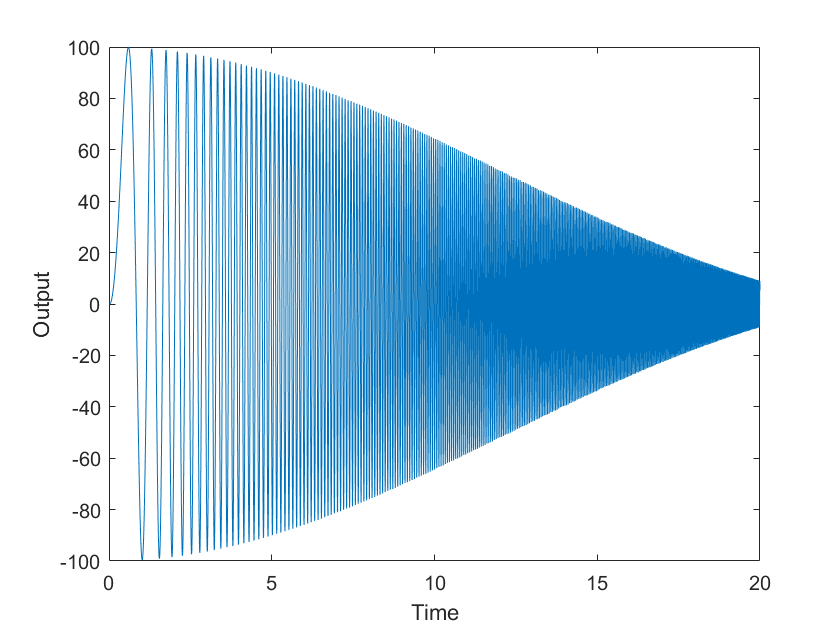
它表示传感器已校准的测量范围(例如加速度计上的 +/- 2g 或陀螺仪上的 +/-500°/s),它通常可以比最大指定值更远,但不能保证测量的准确性。例如,下图显示陀螺仪以 500°/s 的速度饱和,这意味着传感器不会测量任何更快的旋转。
# 比例因子稳定性
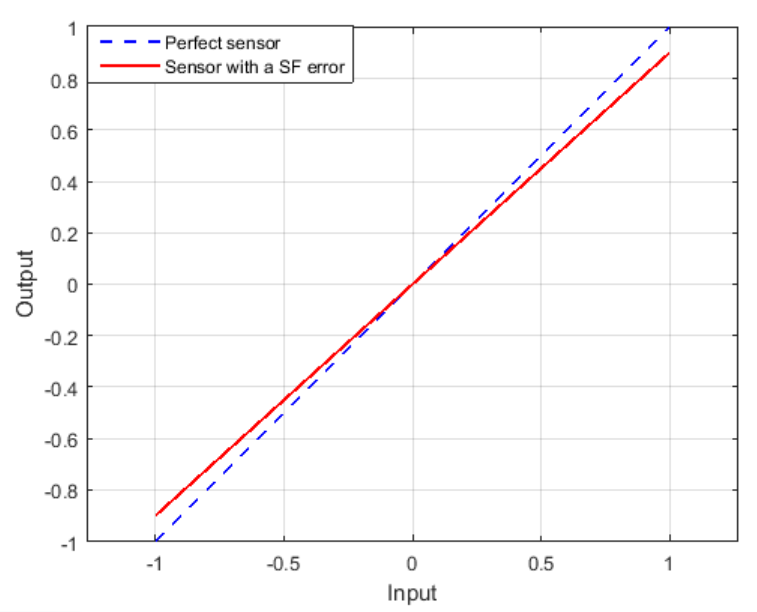
比例因子误差是与施加的运动成正比的测量误差。先进的传感器热校准可以最大限度地减少此类误差。FDISystems 规范的比例因子误差包括热稳定性误差和长期稳定性误差。
# 非线性
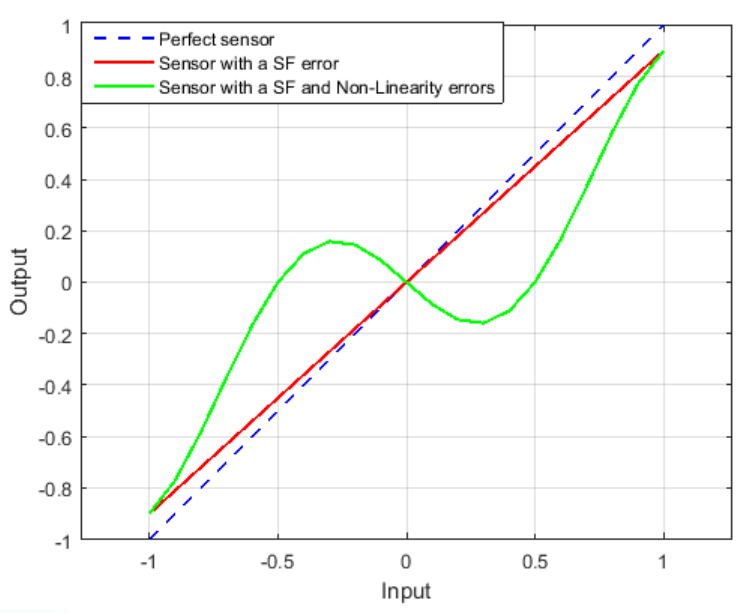
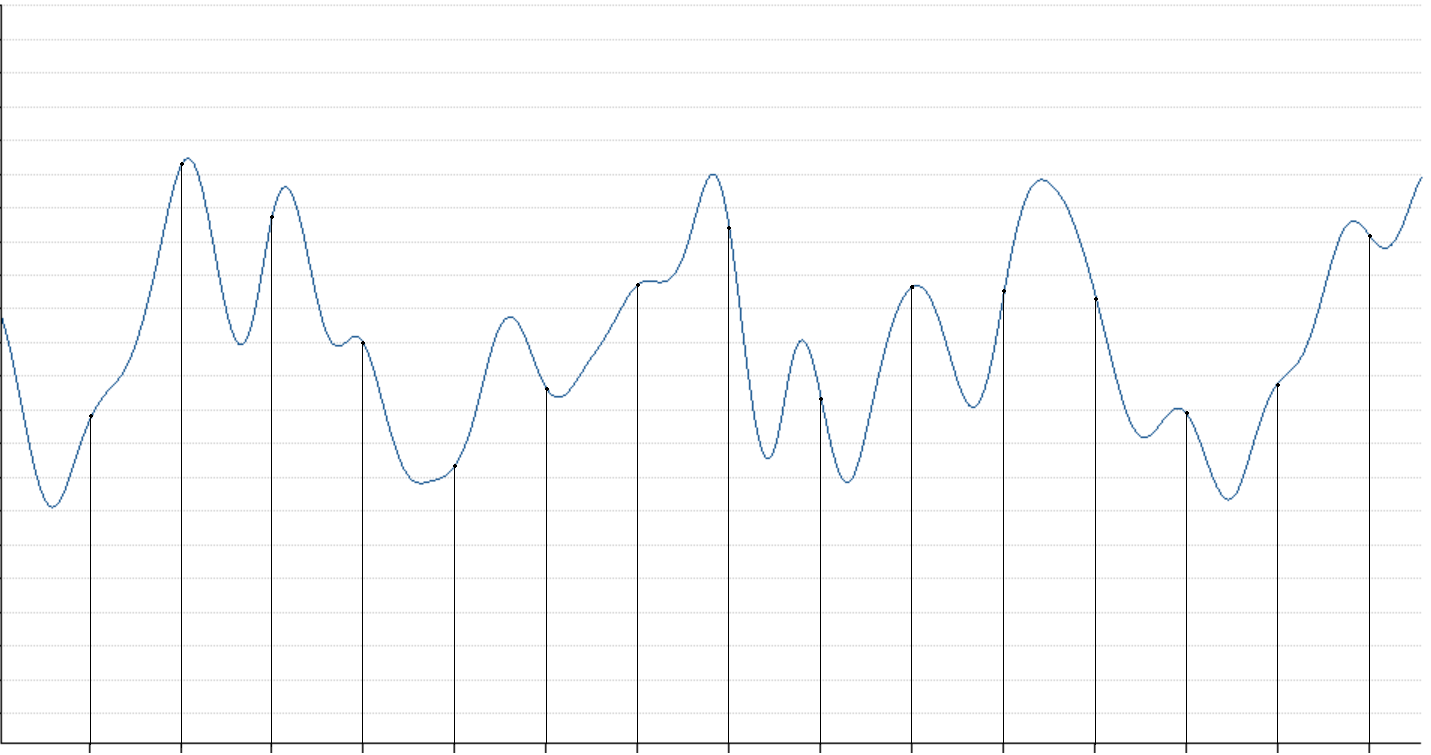
非线性类似于比例因子:传感器的输出与它应该测量的实际输入不对应。然而,输出不是根据满量程(红色)具有比例误差,而是以更复杂的方式变化(绿色)。
# 一年偏置稳定性
一年偏置规格是传感器数据表中非常重要的信息。它反映了传感器在其使用寿命内将漂移的程度。为了获得这样的规格,FDISystems运行传感器加速老化过程,包括热循环、功率循环、冲击和振动应力。
# 速度/角度随机游走
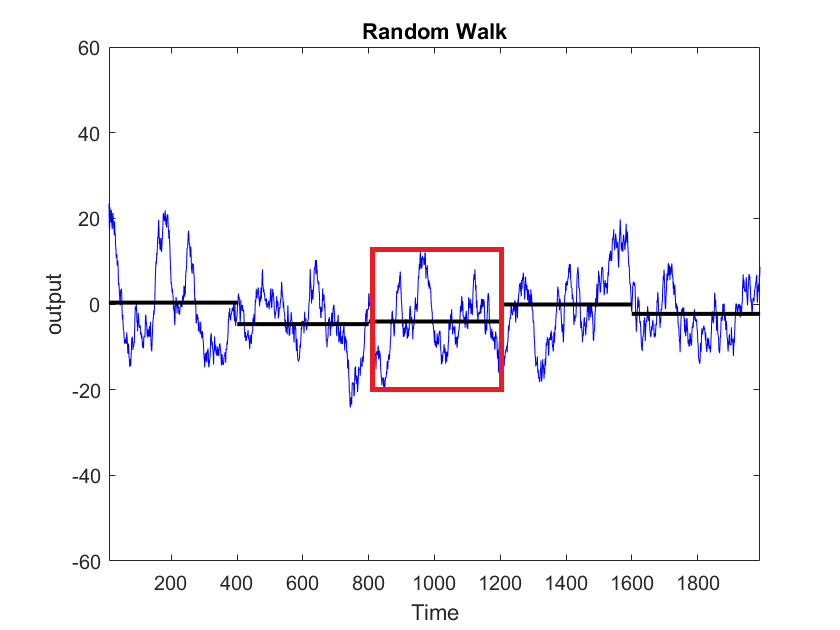
加速度计的速度随机游走或陀螺仪的角度随机游走表示传感器的噪声。偏置对应于长期噪声,而随机游走对应于短期噪声。这种噪声虽然是积分的,但会导致输出的随机变化。
Velocity Random Walk速度随机游走通常以 m/s/√hr 或 m/s/√s 或 g/√Hz 表示
Angular Random Walk角度随机游走通常以°/√hr或°/√s表示
这对于需要精确滚动和俯仰的指向应用尤为重要。
# 运行偏置不稳定
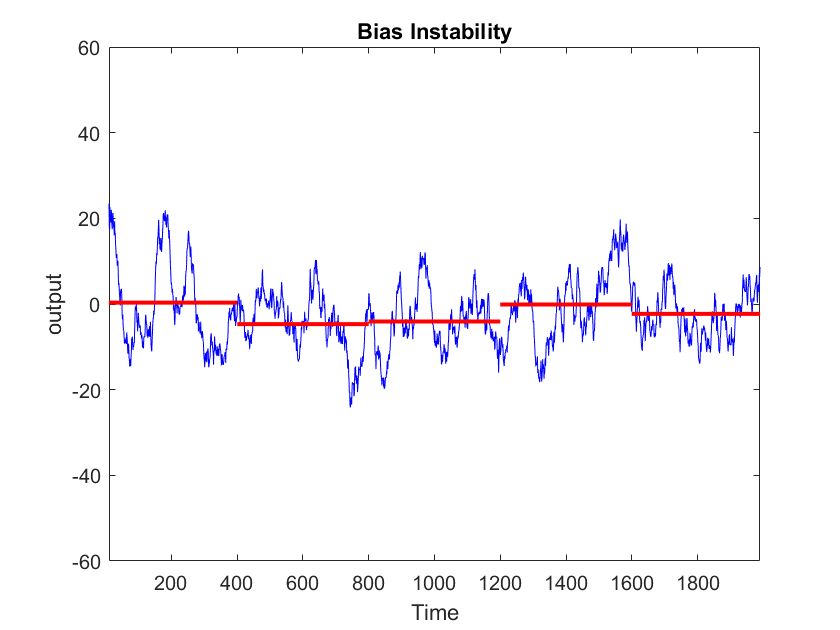
由于温度和机械应力等各种影响,IMU 的偏置在通电时会随着时间的推移而变化,这就是为什么 INS 需要不断借助外部辅助(如 GNSS、里程表、DVL 等)结合车辆动力学来重新估计这种偏差。 运行偏置不稳定性(In run Bias instability )是所有MEMS IMU的一种幻数,较低的值始终是目标。但是,此值并不能提供有关实际传感器性能的太多见解。特别是因为:
- 该值通常在恒定温度下测量
- 偏置不稳定性从未指定与相关时隙 (tau) 一起。如果偏差不稳定性是在非常低的时隙(例如tau<200s)获得的,那么这些信息就没有意义,因为偏差会很快发散。
# Allan 方差
Allan方差是一个复杂的图表,显示了传感器在各种时间尺度上的表现。
Allan方差通常在环境温度和控制温度下测量,因此用户在比较Allan方差时仍应小心。
当高频噪声为“高斯”时(通常情况如此),可以在 1 秒的时间尺度上测量角/速度随机游走。
偏置不稳定性是曲线的底部。
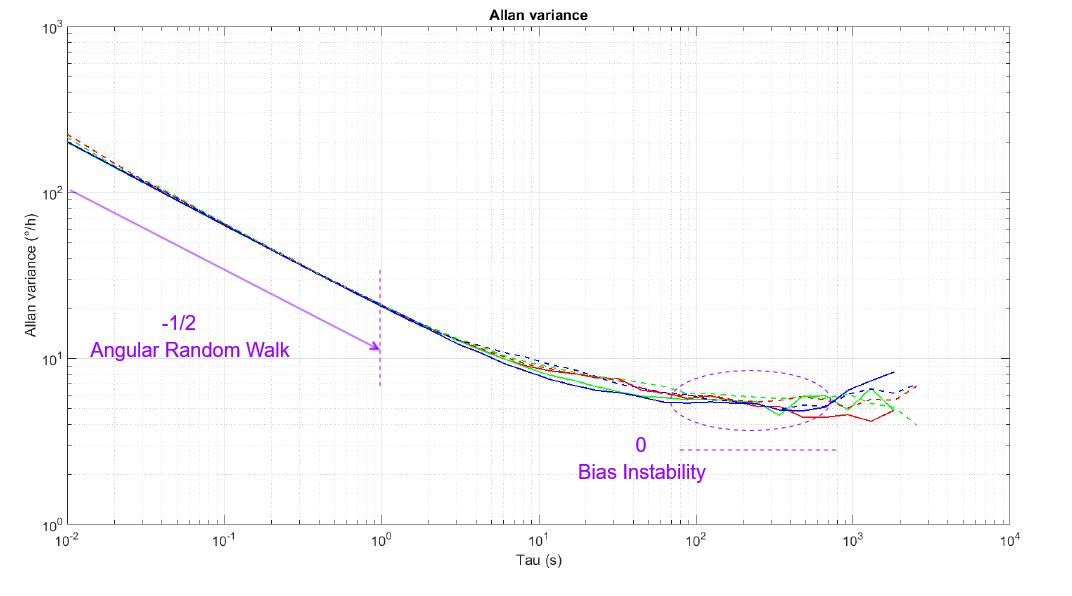
更重要的是传感器在达到偏置不稳定性后的行为。虽然最好的MEMS传感器趋于稳定,但较低等级的传感器或未经校准的传感器会迅速上升,显示传感器偏置漂移。
# 振动整流误差VRE
它通常在高质量的系统上提供,而大多数 IMU 只是没有指定振动中会发生什么。
振动校正误差给出了加速度计或陀螺仪上给定振动水平的预期偏差。
例如,如果VRE为1°/h/g²,这意味着我们可以预期1g随机振动的最大偏置为1°/h。
# 采样率
采样率是在传感器输入端进行测量的频率。采样率除以 2 就是奈奎斯特频率,它给出了我们正在测量的信号的最大可观测频率。
# 带宽
带宽Bandwidth是您可以获取可靠加速度或角速度读数的最大频率。这将直接表示您将能够测量的运动频率,因为任何频率高于带宽的信号都会衰减。
# 分辨率
分辨率Resolution是传感器上可测量的最小增量。
该参数不太重要,因为通常比传感器的噪声低得多。传感器角度或速度随机游走将是实际的决定性因素,因为该参数给出了 1 秒平均值期间的实际系统噪声水平。
# 正交性
正交性Orthogonality表示不同轴的传感器之间的物理错位。
# 跨轴灵敏度
Cross-Axis Sensitivity这是传感器对施加在垂直轴上的振动的灵敏度。理想情况下,它应该是最小的,因为每个轴都应该彼此独立。
# Gyro-G效应
陀螺仪在加速时可能会有偏差,这种误差称为陀螺仪 g 效应。这通常在校准期间进行估计和补偿。