
# INS在水文地理学方面优于MRU
在海洋测量应用中,根据船舶运动补偿声纳测量值至关重要。同时,需要位置输入来对点云进行地理定位。多年来,传统的方法是集成两个独立的组件:一个运动参考单元(MRU)和一个GNSS接收器,能够进行RTK处理以实现厘米精度。如果该解决方案适用于许多基本的水文应用,则在更具挑战性的条件下可能会遇到困难,例如桥梁测量或在波涛汹涌的大海中操作。
# Principle
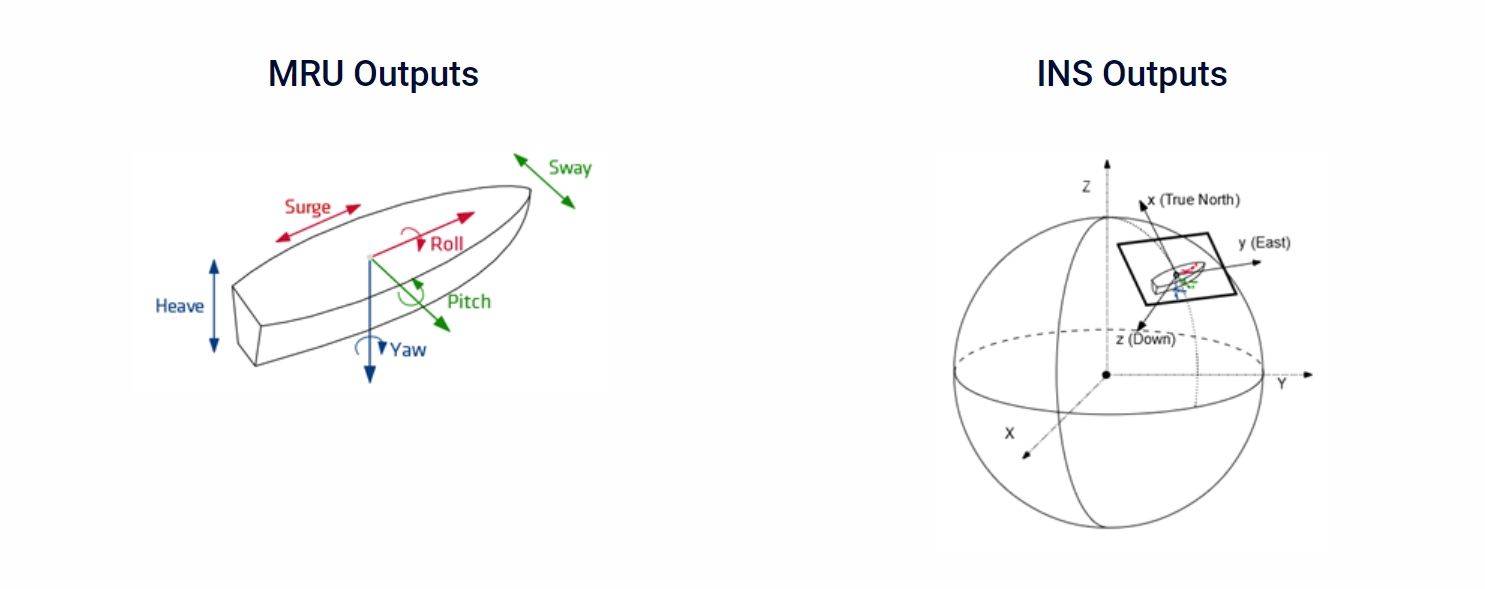
MRU(运动参考单元)也称为 AHRS(姿态航向和参考系统),是一种动态测斜仪。它使用陀螺仪检测旋转,使用加速度计检测重力,并计算其方向以提供滚动和俯仰。它可以使用地球磁场或地球自转速率来检测其航向(在这种情况下,也称为陀螺罗盘 、陀螺罗经)。它还使用其加速度计来检测波浪运动并提供船舶运动(升沉、浪涌和摇摆)测量。MRU 性能在低动态应用程序中是最佳的,并且可能会受到动态的显著影响。
INS是一个全惯性导航系统,它将使用GNSS辅助作为主要辅助源来补充惯性测量。由于惯性和GNSS耦合,即使在GNSS干扰的情况下,INS也能够输出位置。此外,INS姿态输出对动态不敏感,使其非常适合在具有挑战性的条件下操作。
# 优势
具有独立GNSS接收机的MRU与INS之间的快速比较清楚地表明,如果需要导航数据,则INS将是比具有GNSS的MRU更可取的解决方案。
| MRU with GNSS | INS | |
|---|---|---|
| Affordability | + | ++ |
| Ease of configuration | + | ++ |
| Performance | ++ | +++ |
| Outputs | + | +++ |
# INS测量的改进
在 INS 中,GNSS 速度可以辅助 Heave 算法,即使在波涛汹涌的海面上也能保持最佳精度,因为单个 MRU 完全取决于其加速度计。这意味着,即使我们纯粹关注姿态和船舶运动,GNSS也已经带来了性能提升。
现在,如果我们也认为该位置是必要的,那么使用INS(而不是MRU+GNSS)将大大提高位置性能。惯性确实可以补偿GNSS的不准确和中断。
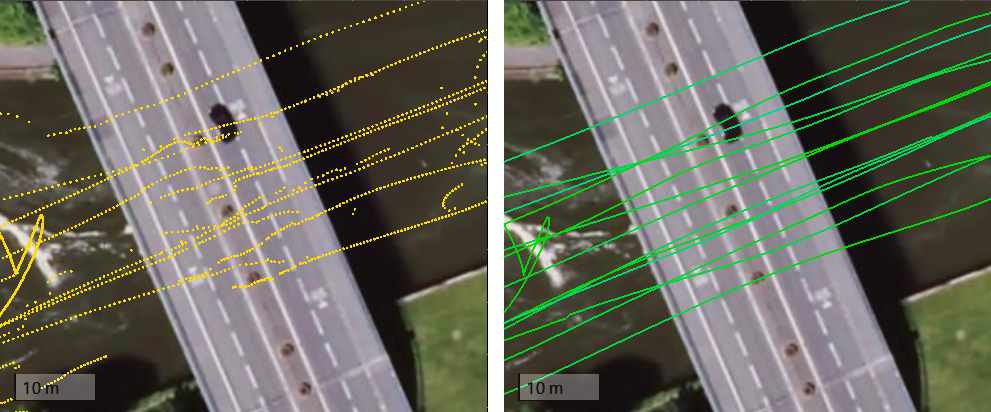
一个典型的例子是桥梁测量应用。在桥下时,独立的 GNSS 接收器位置会不准确甚至丢失。使用 INS 而不是 MRU + GNSS 将允许连续定位。接下来的 2 张图片显示了在勘测期间在桥下巡航时仅 GNSS(黄色)与 INS 位置(绿色)之间的比较。
← 惯导系统为何会“越走越偏” 如何比较IMU →