
# FDI SPKF 运行模式
# FDI SPKF 介绍
得益于现代化的处理架构,FDISYSTEMS的惯性系统运行实时SPKF。GPS/GNSS 和惯性传感器之间的耦合允许 GNSS 数据校正任何惯性漂移,同时保持高频导航输出,具有出色的性能。
实施的算法不仅仅是直接的EKF实现,还包括高级误差模型和错误测量检测,以确保随时提供最佳导航性能。
模块化设计允许将各种辅助传感器连接到INS.可以连接GNSS,里程表,DVL和其他辅助传感器,以进一步提高导航性能。
此外,扩展卡尔曼滤波器能够估计用户输入的一些参数,以进一步提高精度,例如 GPS 杠杆臂、里程表增益等。
专门的运动曲线和误差模型为每个应用和每个辅助设备提供最佳选项和调整。
# 基本原则
惯性传感器(加速度计和陀螺仪)提供非常准确的短期运动测量,但当积分时间变长时会出现漂移。其他一些系统(例如 GNSS 接收器或里程计)提供低频测量,可能会受到干扰或短期测量误差的影响,但这些传感器可以长期提供良好的性能。
卡尔曼滤波器背后的基本思想是充分利用每个传感器的优点,避免缺点。高频预测(也称为传播)步骤使用惯性传感器来精确测量运动和导航数据。当辅助数据(例如 GPS 位置、里程表数据或 DVL 读数)可用时,卡尔曼滤波器将使用它来纠正当前状态并防止漂移。
由于辅助测量的频率低于预测步骤,因此在应用校正后可以观察到小跳跃。在正常操作条件下,这种跳跃应该非常小。
协方差矩阵保持每个估计参数误差的最新状态。当没有可用的测量时,估计误差往往会增加;当收到新的测量值时,该误差将会减小。该协方差矩阵还用于处理每个估计参数之间的“链接”。
除了 EKF 之外,还实施了传感器管理器来检查辅助测量并拒绝不良测量。
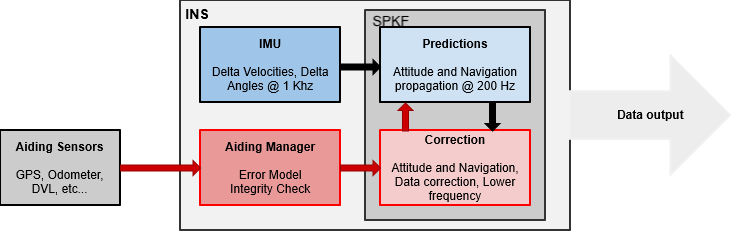
为了总结 EKF 操作,下图显示了如何使用 IMU 和外部传感器
# 运行模式
卡尔曼滤波器将根据情况运行多种计算模式。
# 未初始化模式
仅在启动时观察到此模式。在第一次姿态计算之前,滤波器使用加速度计识别重力的平均方向。此模式假定加速度较低,因此当器件静止或匀速上电时,可实现最佳初始化。如果INS在运动期间通电,则可能会在启动后的几分钟内达到完全精度。
# 垂直陀螺仪模式
初始化横滚角和俯仰角后,EKF 滤波器将以垂直陀螺仪(Vertical Gyro mode)模式运行,其中仅估计横滚和俯仰角。此模式使用垂直参考和内部陀螺仪来估计方向。因此,航向角是自由漂移的。船舶运动提供了运动数据,但在动态环境中可能会降低精度。
在这种模式下,性能取决于车辆的动力学。在高加速操作期间,性能可能会受到影响。
# 航向粗对准过程
本节仅适用于设备配置为在 AHRS 或 INS 操作模式下运行的情况。Heading Rough alignment procedures
在“垂直陀螺仪”模式下运行时,EKF 不断尝试使用不同的程序进行第一航向角对齐。这些过程有一些约束,下表说明了如何使用它们以及在哪些情况下使用它们:
| 方法 | 有效性 | Constraints - Remarks |
|---|---|---|
| 磁航向 | 当磁性航向辅助被启用时 | 此模式在入门级应用中很常见,没有高精度要求。如果启用了磁力计,则此信号在启动时可用。 |
| 全球导航卫星系统双天线航向 | 当 GNSS 双天线航向作为辅助输入被激活时。 | 如果设置允许安装两个GNSS天线,这种方法将是最方便的。它使用双天线 GNSS 接收器提供的 GNSS 真实航向来对齐航向。 |
| 运动学对准(航迹角辅助) | 在前轮导向汽车和固定翼飞机以及运动曲线中。 | 此方法允许航向主要与行进方向(地面上的航向)对齐的应用程序的航向对齐。它使用 GNSS 速度,考虑到首选的行进方向是向前的。 |
| 自由运动学对准(组合导航对准) | 在直升机、无人机、船舶和行人运动配置文件中 | 此方法使用相对速度来定义航向。这允许在任何方向上进行任何运动,这与传统的运动学对准方法不同。 |
# AHRS mode
一旦执行了航向粗略对齐,EKF 就可以估计全部航姿。垂直参考仍在稳定横滚角和俯仰角。由于双天线或磁辅助,航向也稳定。位置和速度是自由漂移的,在此模式下不能被视为有效。
至于垂直陀螺仪模式,性能可能会受到高动态机动的影响。
# 位置和速度初始化
至于航向对齐,当在AHRS模式下运行时,系统会连续尝试使用GNSS输入初始化位置和速度。
# 全导航模式
在这种模式下,EKF 提供完整的导航输出:估计方向、绝对位置和速度。
全导航模式Full Navigation mode可以使用所有可用的传感器输入来保持最佳解决方案,即使在 GNSS 短暂中断的情况下也是如此。
AHRS单元的行为因产品线而异:Epsilon-A不接受辅助数据,因此它只能在AHRS模式下运行。但是,更高性能的运动参考单元 (MRU) 接受外部 GNSS 输入,以允许在内部使用导航模式。这提高了方向输出的性能。在这种情况AHRS - Navigation Mode下,只有方向输出仍然可用。
# 航向能观性
本节对于了解 GNSS 辅助 INS 如何能够跟踪准确的航向非常重要。
# 使用单天线GNSS
在最简单的设置中,只有一个 INS 由单个 GNSS 天线辅助,并不总是能观察到航向。
特别是,当该设备处于静态条件或恒定速度时,只有滚动和俯仰角被精确校正,并且航向可能会显示出一些漂移(在标准偏差输出上报告)。一旦设备处于机动(加速度变化),EKF 也会稳定航向角。航向能观。
如果报告的偏航角标准偏差变高或误差增加,则进行一些动态操作将提高精度。这将有助于无人机的机载应用,例如只有一根天线可用。
# 使用双天线GNSS
当INS与双天线GNSS系统耦合时,在低动态条件下的航向观测性得到极大改善。在这种情况下,INS将能够在所有条件下提供准确的航向,并将在多路径环境中应对GNSS航向中断。双天线航向还提供非常精确的航向角,这通常是测量应用所需要的。
该方案在低动态和高精度要求的船舶应用中特别有效。
# Automotive 汽车应用约束
在汽车应用中,通常可以假设没有横向速度。此假设允许过滤器优化其性能。因此,一旦车辆行驶,航向就会变得完全准确。
使用双天线航向可以进一步提高航向性能,以防车辆经常处于静止状态导致航向不能观的漂移。
# 使用磁航向
在许多应用中,例如空中或有时在海洋环境中,只要磁力计经过校准并在远离磁干扰的情况下使用,就可以提供有效的航向辅助输入。通过使用位置和日期以及 2020 年世界磁力模型,磁航向将转换为真航向。
磁航向是在低动态条件下观察航向的一种经济有效的方法,但在复杂的磁性条件下可能会退化。其精度限制在大约1°。
# 提高导航性能
# 侧向速度约束
当选择“汽车”运动曲线时,EKF 假定横向速度为 0(没有打滑漂移)。除了提高航向性能外,这将大大减少城市峡谷等具有挑战性的条件下的位置漂移。
需要定期转弯来限制各个方向的速度。
# 里程计辅助
除了GNSS辅助之外,所有INS型号都提供里程计Odometer输入,可以大大提高导航系统在具有挑战性的环境(例如汽车应用的城市峡谷)的性能。即使在 GNSS 中断期间,里程表也能提供可靠的速度信息。这大大提高了航位推算精度。
与仅使用速度约束相比,里程表辅助提供了有用的速度信息,这些信息在直线或轻微转弯的航位推算中将非常有效。
我们的产品支持:
● 正交输出或具有正反方向的兼容里程表。
● CAN车辆速度消息(完全可配置),用于设置,与车辆的ODBII连接器直接接口
里程表集成非常简单,因为 EKF 将实时估计微调里程表的增益,并纠正里程表对齐和杠杆臂中的残余误差。
# 多普勒速度对数辅助 DVL
在许多海洋或水下应用中,DVL 是当 GPS 不可用时改进导航的不错选择。DVL已与EKF完全耦合,可在底部跟踪和水层条件下提供完整的导航性能。无需校准,因为EKF将自动调整对准和增益参数。
DVL数据与EKF的融合可以在真实条件下提供非常准确和可靠的水下位置数据。精心选择的任务模式(例如割草机)也可以极大地限制位置误差的增长。
除了卡尔曼滤波器与DVL的集成外,惯性传感器还可以存储和输出DVL消息(PD0),用于水剖析应用。
# ZUPT Mode
EKF能够在某些运动配置文件中自动使用“零速度更新”(ZUPT)。当传感器停止移动时,卡尔曼滤波器会检测零速度条件,并使用该信息来校正状态,然后限制位置/陀螺零偏/航向等漂移。