# 1.2 FDIGroundStation基本使用说明
# 1.2.1 如何打开FDIGroundStation
打开上位机应用程序FDIGroundStation.exe,将模块与主机通过串口连接,通过设备管理器获得模块的端口号:

如果端口号获取失败可能是没有安装USB转TTL的设备驱动CP210x USB。
然后点击上位机左上角的Communication->Add Link,弹出如下界面:
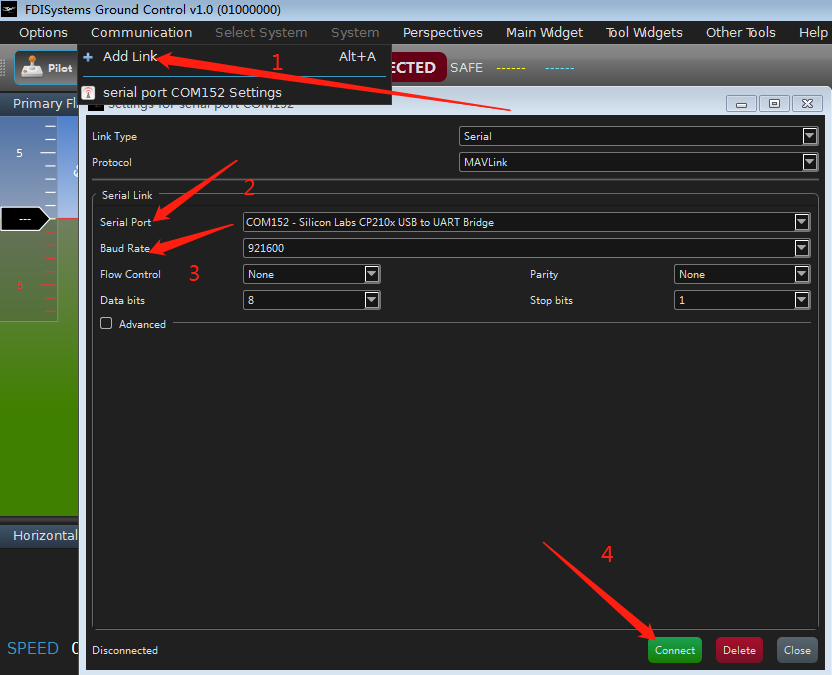
通过Serial Port选择模块的端口号,通过Baud Rate配置波特率为921600bps(默认),点击下方的绿色图标Connnect即可连接上位机。
# 1.2.2 FDIGroundStation界面组成
FDIGroundStation界面由Pilot、config和Data三大部分组成:

# 1.2.2.1 Pilot界面

该界面可以分为5个部分:
l 第一部分:飞控地面站仪盘显示界面。显示当前姿态和速度,位置,GPS经纬度高度等信息,通过该界面可以快速观测模块动态和静态的姿态输出性能。
l 第二部分:地图显示界面。当接入GPS信号时,根据当前接收到的经纬度信息在地图上实时定位,同时显示定位轨迹,支持谷歌地图。
l 第三部分:FDIsystem导航系统显示界面。
l 第四部分:状态显示界面。从上到下依次为:电池信息、MAVLink接收丢包率、MAVLink发送丢包率,MCU运行占用率、电台信号质量和GPS信号质量。当没有接入GPS信号时,显示 NO GPS;GPS定位精度由低到高依次显示为GPS 2D,GPS 3D,GPS Float和GPS Fixed;当接入双天线时,该图标显示为移动基站的GPS状态,当移动基站和移动站均达到GPS Fixed状态时,该图标显示为RTK DUAL。HAcc-horizontal accuracy est表示水平准确估计,VAcc-vertical accuracy est 表示垂直准确估计,它们的值越小,GPS定位的精度越高。
l 第五部分:通讯控制台界面。当对上位机进行了操作,该界面将反馈对应的信息。
# 1.2.2.2 config界面
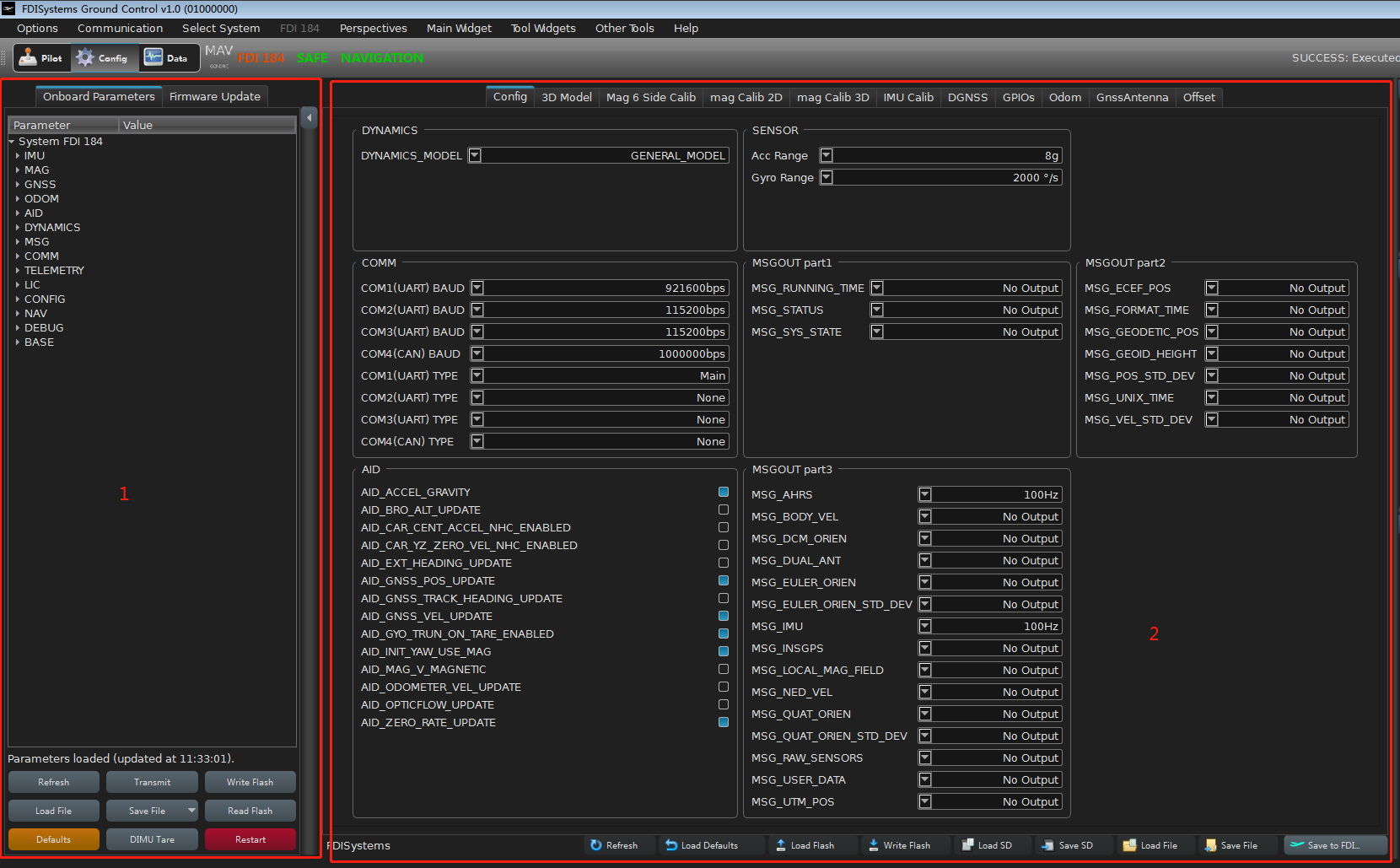
该界面主要进行参数配置,校准配置和输出数据包配置等操作:
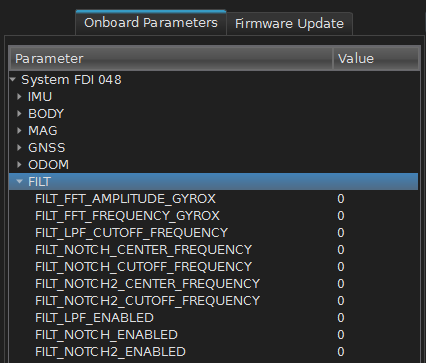
l 第一部分:该部分由Onboard parameters和Firmware Update组成。前者显示的是FDIsystem所使用的卡尔曼滤波器SPKF的配置参数以及传感器出厂时刻度因子、耦合误差、零偏等配置参数,一般不需要进行改动;后者与产品固件升级有关,具体见[1.6 FDIGroundStation 固件升级](<#_1.6 FDIGroundStation 固件升级>)。
l 第二部分:该部分由config、3D Model、Mag 6 side calib等功能配置界面组成:
1. Config界面:该界面进行最主要的参数配置和输出数据包配置:
DYNAMIC界面配置对象模型:默认使用GENERAL_MODEL,车载应用可以使用AUTODRIVER_MODEL,其他模型正在开发中;
COMM界面配置COMM1到COMM4的波特率和端口类型;
AID界面配置SPKF所使用的融合算法类型,具体见[1.3 FDIGroundStation SPKF融合开关说明](<#_1.3 FDIGroundStation SPKF融合开关说明>);
SENSOR界面配置加速度计和陀螺仪量程;
MSGOUT PART1-PART3界面配置用户使用FDILINK协议获取的数据包类型及输出频率:DETA10-V和DETA10-A默认配置100Hz的MSG_IMU和MSG_AHRS数据包,DETA10-N默认增加100Hz的MSG_INSGPS数据包。用户可以根据本产品的《FDILINK通讯协议》选择需要打开的数据包并设置对应的发送频率。
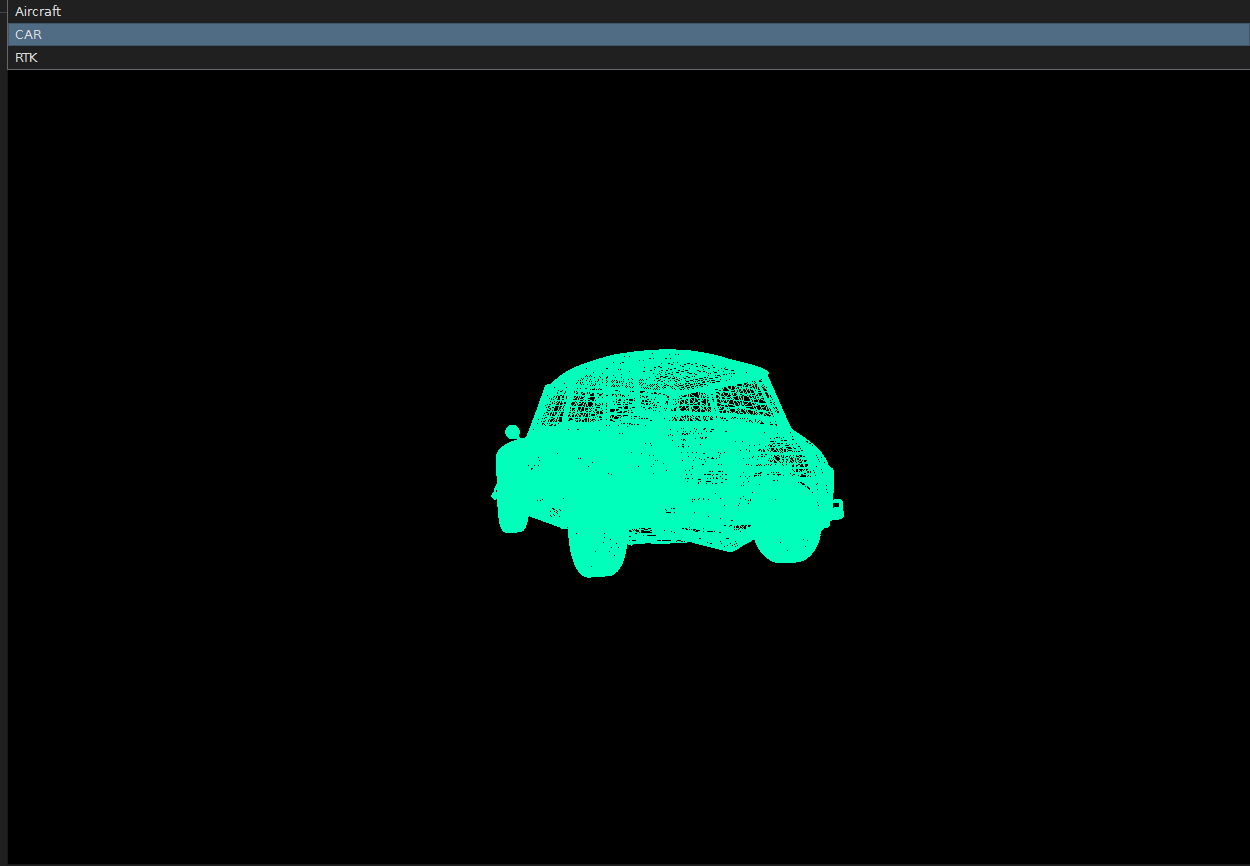
2. 3D Model界面:该界面将模块实时输出的姿态运用于飞机模型、汽车模型和FDIsystem产品模型,通过鼠标滚轮可以进行放大缩小操作:
3. Mag 6 side calib界面:磁力计六面校准功能,具体使用说明见[1.4.1 Mag 6 side Calib](<#_1.4.1 Mag 6 side Calib>)。
4. mag calib 2D界面:2D磁力计校准功能,具体使用说明见[1.4.2 mag Calib 2D](<#_1.4.2 mag Calib 2D>)。
5. Mag calib 3D界面:3D磁力计校准功能,具体使用说明见[1.4.3 mag Calib 3D](<#_1.4.3 mag Calib 3D>)。
6. IMU Calib界面:IMU刻度因子,耦合误差项,零偏等校准功能。由于出厂时这些参数已经得到校准,因此该功能默认不启用。
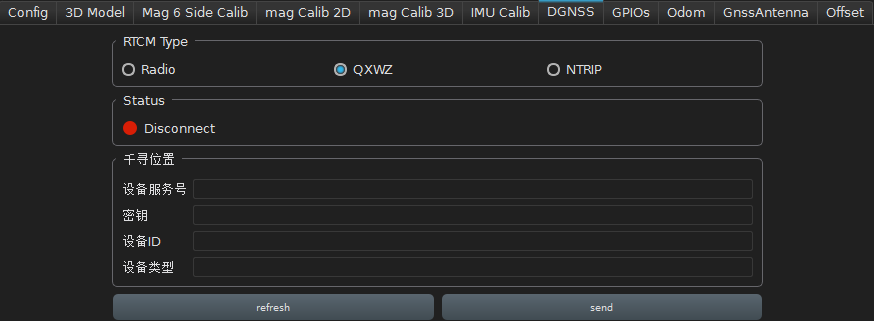
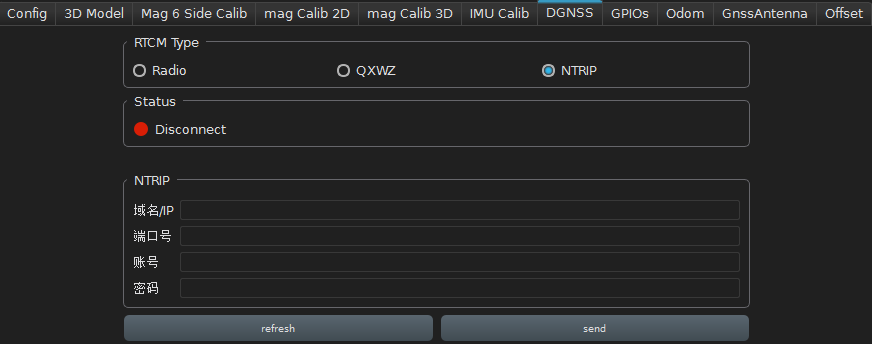
7. DGNSS界面:该界面进行GNSS相关配置:
Radio:电台模式。需要自行配置基站:
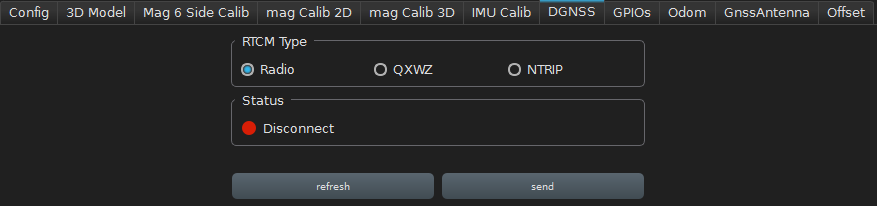
QXWZ:网络RTK模式。该模式需要连接网络,同时输入千寻账号:
NTRIP:局域网模式。配置基站后,该基站附件的所有用户通过连接对应的局域网即可使用该基站:
8. GPIO界面:待补充。
9. Odom界面:里程计校准,待补充。
10. GnssAntenna界面:双天线校准,待补充。
11. Offset界面:待补充。
# 1.2.2.3 Data界面
该界面由FDIsystems Log Viewer、FDI Diagnostic Telemetry和MAVlink Data Plot三部分组成:
FDIsystems Log Viewer:上位机作图界面,具体见[1.5 FDIGroundStation Log数据作图说明](<#_1.5 FDIGroundStation Log数据作图说明>)。
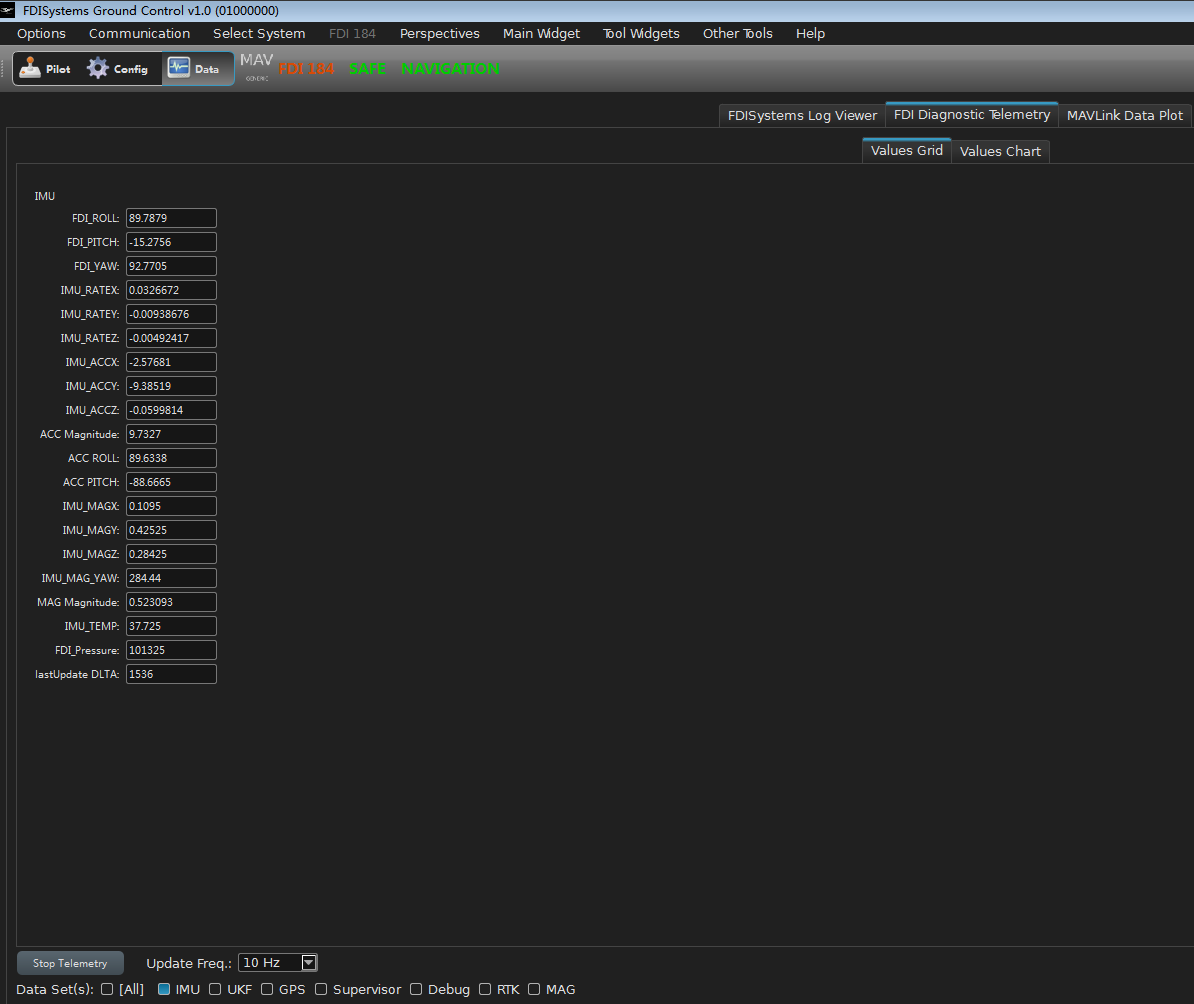
FDI Diagnostic Telemetry:数据显示与记录界面。Value Grid显示数据格,如下图所示:
Value chart显示数据图表:
① Start Telemetry:将勾选完的数据输出到图表中。
② Data set(s):数据输出类型,通过点击数据类型前面的方框来选择需要输出到图表中的数据,可以勾选多个。数据输出类型如下:
IMU:惯导数据。
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| IMU.FDI_ROLL | 融合后的横滚角 | 度(°) |
| IMU.FDI_PITCH | 融合后的俯仰角 | 度(°) |
| IMU.FDI_YAW | 融合后的航向角 | 度(°) |
| IMU.IMU_RATEX | 陀螺仪原始X轴角速度 | 弧度/秒(rad/s) |
| IMU.IMU_RATEY | 陀螺仪原始Y轴角速度 | 弧度/秒(rad/s) |
| IMU.IMU_RATEZ | 陀螺仪原始Z轴角速度 | 弧度/秒(rad/s) |
| IMU.IMU_ACCX | 加速度计原始X轴加速度 | 米/秒平方(m/s^2) |
| IMU.IMU_ACCY | 加速度计原始Y轴加速度 | 米/秒平方(m/s^2) |
| IMU.IMU_ACCZ | 加速度计原始Z轴加速度 | 米/秒平方(m/s^2) |
| IMU.ACC Magnitude | 加速度计输出加速度模值 | 米/秒平方(m/s^2) |
| IMU.ACC ROLL | 仅由加速度计数据计算的横滚角 | 度(°) |
| IMU.ACC PITCH | 仅由加速度计数据计算的俯仰角 | 度(°) |
| IMU.IMU_MAGX | 磁力计原始X轴磁场强度 | 高斯(guass) |
| IMU.IMU_MAGY | 磁力计原始Y轴磁场强度 | 高斯(guass) |
| IMU.IMU_MAGZ | 磁力计原始Z轴磁场强度 | 高斯(guass) |
| IMU.IMU_MAG_YAW | 仅由磁力计数据计算的磁航向角 | 度(°) |
| IMU.MAG Magnitude | 磁力计输出磁场强度模值 | 高斯(guass) |
| IMU.IMU_TEMP | 传感器温度 | 摄氏度(℃) |
| IMU.FDI_Pressure | 气压计原始气压值 | 帕斯卡(Pa) |
| IMU.lastUpdate DLTA |
UKF:SPKF融合数据。
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| UKF.UKF_POSN | 融合后的北向位置 | 米(m) |
| UKF.UKF_POSE | 融合后的东向位置 | 米(m) |
| UKF.UKF_POSD | 融合后的地向位置 | 米(m) |
| UKF.UKF_VELN | 融合后的北向速度 | 米/秒(m/s) |
| UKF.UKF_VELE | 融合后的东向速度 | 米/秒(m/s) |
| UKF.UKF_VELD | 融合后的地向速度 | 米/秒(m/s) |
| UKF.UKF_LON | 融合后的经度 | 度(°) |
| UKF.UKF_LAT | 融合后的纬度 | 度(°) |
| UKF.UKF_GYO_BIAS_X | 陀螺仪X轴动态零偏 | 弧度/秒(rad/s) |
| UKF.UKF_GYO_BIAS_Y | 陀螺仪Y轴动态零偏 | 弧度/秒(rad/s) |
| UKF.UKF_GYO_BIAS_Z | 陀螺仪Z轴动态零偏 | 弧度/秒(rad/s) |
| UKF.UKF_ACC_BIAS_X | 加速度计X轴动态零偏 | 米/秒平方(m/s^2) |
| UKF.UKF_ACC_BIAS_Y | 加速度计Y轴动态零偏 | 米/秒平方(m/s^2) |
| UKF.UKF_ACC_BIAS_Z | 加速度计Z轴动态零偏 | 米/秒平方(m/s^2) |
| UKF.UKF_QUAT_W | 融合后的四元数 | |
| UKF.UKF_QUAT_X | ||
| UKF.UKF_QUAT_Y | ||
| UKF.UKF_QUAT_Z |
GPS:GPS数据。
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| GPS.Lat | GPS原始纬度 | 度(°) |
| GPS.Lon | GPS原始经度 | 度(°) |
| GPS.LocalN | 根据原始经纬度推算的北向粗略位置 | 米(m) |
| GPS.LocalE | 根据原始经纬度推算的东向粗略位置 | 米(m) |
| GPS.hAcc | 水平准确估计 | 米(m) |
| GPS.vAcc | 垂直准确估计 | 米(m) |
| GPS.course | GPS原始航迹角 | 度(°) |
| GPS.height | GPS原始高度 | 米(m) |
| GPS.pDOP | GPS位置精度因子 | |
| GPS.tDOP | GPS时间精度因子 | |
| GPS.velN | GPS原始北向速度 | 米/秒(m/s) |
| GPS.velE | GPS原始东向速度 | 米/秒(m/s) |
| GPS.velD | GPS原始地向速度 | 米/秒(m/s) |
| GPS.lastPosUpdt | ||
| GPS.lastMessege | ||
| GPS.timeOfWeek | ||
| GPS.posN | 根据原始经纬度推算的北向位置 | 米(m) |
| GPS.posE | 根据原始经纬度推算的北向位置 | 米(m) |
RTK:移动站和移动基站数据,用于双天线模式。
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| RTK.Lat | 移动基站原始纬度 | 度(°) |
| RTK.Lon | 移动基站原始经度 | 度(°) |
| RTK.Height | 移动基站原始高度 | 米(m) |
| RTK.movingBaseVelN | 移动基站原始北向速度 | 米/秒(m/s) |
| RTK.movingBaseVelE | 移动基站原始东向速度 | 米/秒(m/s) |
| RTK.movingBaseVelD | 移动基站原始地向速度 | 米/秒(m/s) |
| RTK.movingBaseRelLength | 移动基站与基站之间的距离 | 米(m) |
| RTK.movingBaseRelHeading | 移动基站与基站形成的航向角 | 度(°) |
| RTK.movingBaseRelN | 移动基站在以基站为原点的北向位置 | 米(m) |
| RTK.movingBaseRelE | 移动基站在以基站为原点的东向位置 | 米(m) |
| RTK.movingBaseRelD | 移动基站在以基站为原点的地向位置 | 米(m) |
| RTK.RoverRelLength | 移动站与移动基站之间的距离(双天线基线长度) | 米(m) |
| RTK.RoverRelHeading | 双天线航向 | 度(°) |
| RTK.RoverRelN | 双天线基线在北向的位置 | 米(m) |
| RTK.RoverRelE | 双天线基线在东向的位置 | 米(m) |
| RTK.RoverRelD | 双天线基线在地向的位置 | 米(m) |
| RTK.lastUpdate DLTA |
③ Value Selection:选中数据类型的数值显示界面,包含原始值Val,平均值Mean和方差**Variance,**勾选数据左侧的方框即可在右边显示对应的曲线。
④ Avg.Window,Time Span:纵坐标与横坐标的范围,可以进行调整。
⑤ Start Logging:数据记录功能,点击它将输出的数据以txt格式或者log格式保存到指定的位置中。注意需要将数据在左侧Value Selection界面中进行勾选,如下图所示,再次点击该图标数据记录结束,同时生成对应的格式文件,txt文件可以直接查看数据,log文件用于导入上位机作图。

l MAVLink Data Plot😗*MAVLink **数据输出图表:

# 1.2.3 如何保存修改的参数和配置
当用户在FDIGroundStation中修改了参数或者配置的话,需要写入到模块内进行保存,否则修改不生效。具体操作步骤如下:
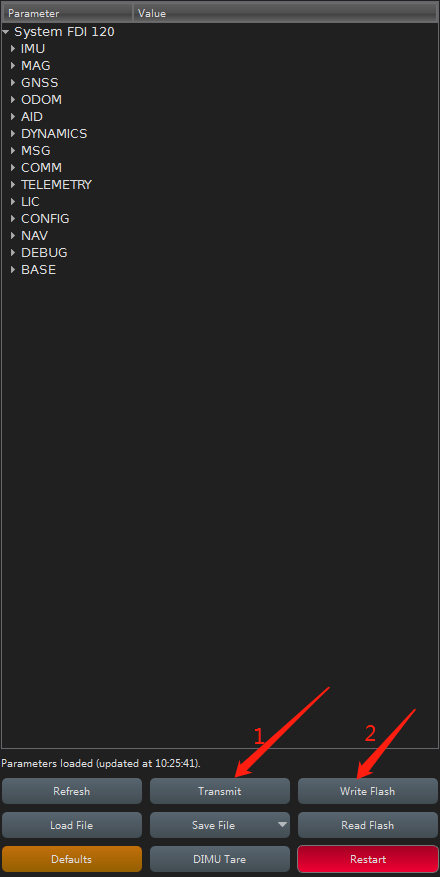
1. 对config界面Onboard parameters里的参数进行了修改,亦或是完成了磁力计校准,里程计校准以及双天线校准等操作之后,需要将新的参数传递到参数表中并写入Flash:依次点击Transmit按钮和Write Flash按钮:
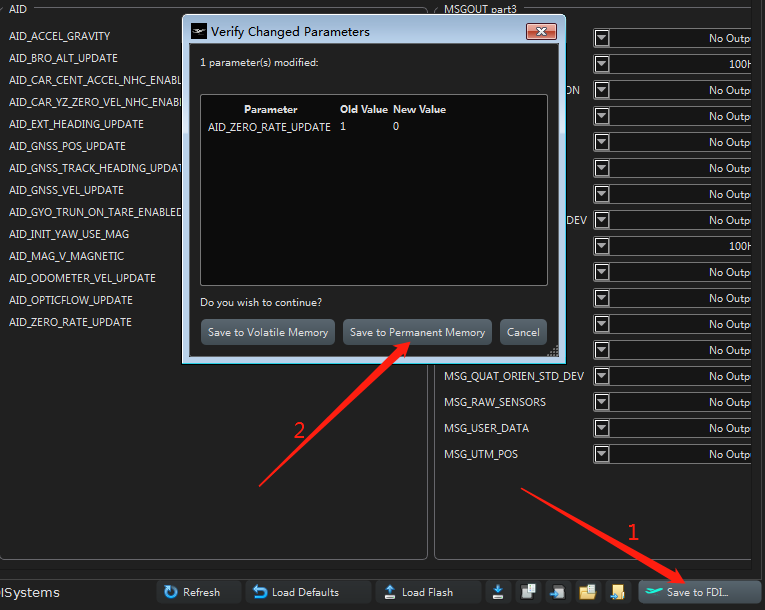
2. 对config界面里的config主界面进行了配置修改同样需要进行保存:

比如用户修改了AID配置后,依次点击右下角的Save to FDI按钮,然后在弹出的窗口中点击Save to Permanent Memory即可完成配置保存,如下图所示。
# 1.2.4 系统重启,调平和参数导入导出
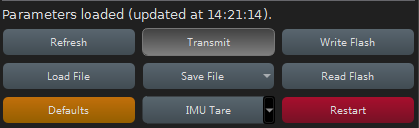
上述功能均在config界面的功能按钮中实现,如上图所示:
Restart:系统重启按钮。当用户修改了参数或者配置时,通过该按钮对系统进行重启,比如打开磁力计开关,进行了磁力计校准等操作;模块输出姿态发散,或者出现系统问题时也可以点击该按钮重启。该功能的作用等价于模块重新上电。
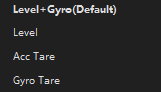
IMU Tare:该功能右侧有一个箭头,点击该箭头将显示如下图所示界面:
Level:坐标系转换功能按钮。将模块安装平面水平放置时(通过全站仪或者气泡居中方法),此时输出的俯仰角和横滚角一般不为零,说明模块与安装平面存在安装误差角。将模块静止放置,点击该按钮后上位机将自动计算出该安装误差角的大小,通过模块内置的旋转矩阵算法将模块坐标系转换到安装平面坐标系。该功能一般用于RTK倾斜测量领域,点击完该按钮后需要点击Write Flash按钮进行参数保存。
Acc Tare:加表调平按钮。模块静止时加速度计输出的模长理论上为1g(约9.8m/s^2),如果加速度计输出的真实模长与1g相差较大,则可以通过该按钮对加速度计零偏进行重新修正,使其回到1g附近。注意点击该按钮前模块必须处于水平静止状态,点击完该按钮后需要点击Write Flash按钮进行参数保存。
Gyro Tare:陀螺仪调平按钮。该按钮的功能是重新计算陀螺仪静态零偏,从而使减去零偏之后的陀螺仪三轴角速度回到零附近。该按钮必须在模块静止时操作,否则计算出来的零偏有误,从而导致姿态漂移。如果用户在静止时发现姿态角在漂移,一般是陀螺仪静态零偏计算有误,建议点击该按钮进行重新校准,点击完该按钮后需要点击Write Flash按钮进行参数保存。
Level + Gyro(Default):该按钮的作用等同于点击一次Level按钮再点击一次Gyro按钮。
Save File:参数表保存按钮。点击该按钮后,可以将Onboard parameters里的参数保存为txt文件格式。FDIsystem的研发人员如果需要对用户的模块进行参数修改以提高使用性能时,用户可以点击此按钮将txt文档发送给研发人员。
Load File:参数表写入按钮。FDIsystem的研发人员对txt文档修改后发送给用户,用户通过该按钮即能将新的参数写入模块中。点击过后需要对参数进行传递和保存否则下次上电时修改的参数会丢失。完整的操作步骤为:
Load File->Transmit->Write Flash。
Refresh: 参数刷新按钮。点击该按钮对参数表和配置表进行刷新,当用户在config界面修改了参数或者配置后**,通过该按钮可以验证改写的参数是否成功写入模块Flash中;或者config**界面有部分参数未显示完全时,也需要点击该按钮使其恢复正常。
# 1.2.5 低通滤波器与陷波滤波器
