# Device Status界面说明
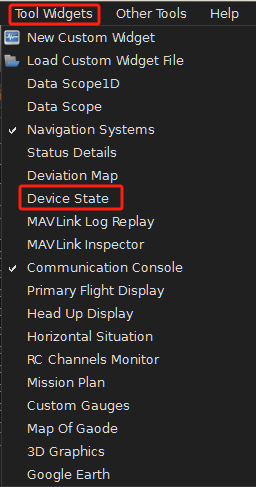
FDIGroundStation提供了一个可视化设备状态界面Device Status,便于用户方便了解当前设备的系统状态、传感器状态、导航状态、GNSS状态等信息。打开该界面的操作如下图所示,在Tool Wigdgets菜单里点击Device State即可显示:
下面对该界面的每一部分进行详细说明:
# Info系统信息
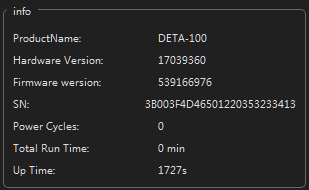
**ProductName**:产品型号,FDISYSTMES的产品型号按下图进行分类:
| THETA系列 | DETA系列 | EPSLION系列 | ||||||
|---|---|---|---|---|---|---|---|---|
| THETA | THETA | THETA | DETA | DETA | DETA | DETA | DETA | EPSILON |
| DETA10-A | DETA10-N | DETA20-A | DETA20-N | DETA30-A | DETA30-N |
- Hardware Version:硬件版本;
- Fireware Version:固件版本;
- SN:产品SN号,每个模组的SN号唯一,我们通过它可以查到到该模组的校准文件,出厂固件等信息:
- Power Cycles:启动次数,仅EPSLION系列统计该值:
- Total Run Time:总运行时长,仅EPSILON系列统计该值:
- Up Time:上电运行时间,每次上电开始统计:
# Systems系统
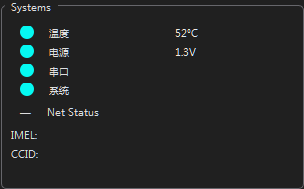
- 温度:显示当前的温度值,温度在-40℃-85℃范围内灯正常亮起(蓝色),否则显示异常(红色);
- 电源:显示当前的工作电压,仅EPSILON能正确显示,电压正常时蓝灯亮,否则红灯量;
- 串口:串口通讯状态图标,正常蓝灯亮,否则红灯亮;
- 系统:系统状态图标,当温度,电源,串口均正常时蓝灯亮,否则红灯亮;
- Net Status: 联网状态图标,当网络连接成功时蓝灯亮,否则为一条线;
- IMEI: 物联网或者SIM卡的国际移动设备识别码,当设备联网成功时显示;
- CCID:物联网卡或SIM卡识别码,当设备联网成功时显示;
# Sensors传感器

Accel:加速度计状态,对于图标x,y,z轴下方的状态灯,显示蓝灯表示该轴传感器正常工作,红灯表示该轴传感器故 障;INRange图标下方的状态灯,显示蓝灯表示三轴加速度计均没有超量程使用,否则表示超量程使用; 如果该模组有第二组加速度计传感器,则第二排状态灯同样显示,定义和第一组相同,否则显示一条线;
Gyro:陀螺仪状态,对于图标x,y,z轴下方的状态灯,显示蓝灯表示该轴传感器正常工作,红灯表示该轴传感器故障; INRange图标下方的状态灯,显示蓝灯表示三轴陀螺仪均没有超量程使用,否则表示超量程使用;如果该模组有第二组陀螺仪传感器,则第二排状态灯同样显示,定义和第一组相同,否则显示一条线;
Mag:磁力计状态,对于图标图标x,y,z轴下方的状态灯,显示蓝灯表示该轴传感器正常工作,红灯表示该轴传感器故障; INRange图标下方的状态灯,如果磁力计没有进行过校准(2D或者3D),或者磁模长与当地地磁场强度不匹配,即存在较大的磁干扰时,状态灯为红灯;状态灯为蓝灯时表示磁力计可以正常使用;
barometer:气压计状态,有气压计且且气压计正常时状态灯为蓝灯,否则为红灯,没有气压计则为一条线;
Temperature:温度计状态,温度在-40℃-85℃范围内灯正常亮起(蓝色),否则显示异常(红色);
# Clock时钟和同步
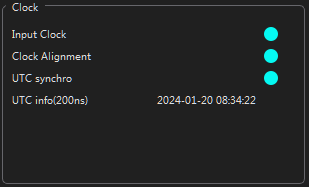
Input Clock:时钟输入有效状态,以捕获1pps中断且解析到GNSS时间为准,此时状态灯为蓝灯,否则为红灯;
Clock Alignment:时钟对准有效状态,以系统滴答定时器与1pps以及GNSS时间对齐生效为准,此时状态灯为蓝灯,否则为红灯;
UTC synchro:UTC时间对准有效状态,由于默认采用给的时钟源为GNSS时间,因此时钟对准有效则UTC时间对准有效,此时状态灯为蓝灯,
否则为红灯;
- UTC info:UTC 时间,即世界协调时时间,时间格式为年月日时分秒,需要注意与北京时间差8小时;
# Solution导航模式
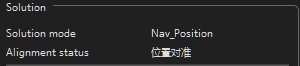
Solution mode:组合导航解算模式,分为以下几类:
| Solution mode | 说明 |
|---|---|
| UNINITIALIZED | 仅由陀螺仪积分的模式 |
| VRU | 仅由加速度计辅助陀螺仪的倾角系统模式 |
| AHRS | 由加速度计和磁力计辅助陀螺仪的航姿参考系统模式 |
| NAV_Velocity | 由GNSS速度辅助的导航系统模式 |
| Nav_Position | 由GNSS位置辅助的导航系统模式 |
Alignment status:组合导航对准状态,分为以下几类:
| Alignment status | 说明 |
|---|---|
| UNALIGNMENT | 未对准 |
| ATTITUDE_ALIGNMENT | 姿态对准 |
| POSITION_ALIGNMENT | 位置对准 |
| ALL_ALIGNMENT | 航姿对准,包括姿态对准和位置对准 |
# Solution
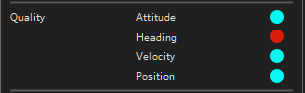
- Quality: 组合导航系统解算质量,包括姿态(Attitude),航向(Heading),速度(Velocity),位置(Position):
(1) Attitude:姿态解算质量,姿态数据可用则状态灯为蓝灯,否则为红灯;
(2) Heading:航向解算质量,航向数据可用则状态灯为蓝灯,否则为红灯;
(3) Velocity:速度解算质量,速度数据可用则状态灯为蓝灯,否则为红灯;
(4) Position:位置解算质量,位置数据可用则状态灯为蓝灯,否则为红灯;
# Aid辅助状态
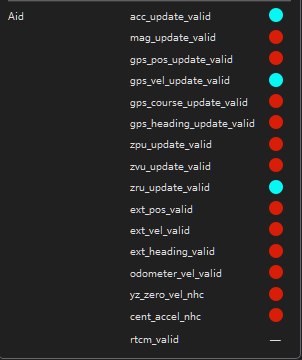
- Aid: 组合导航滤波量测更新有效性状态,如果对应的量程更新有效,则该状态灯显示为蓝灯,否则为红灯,具体说明如下表所示:
| Aid类型 | 说明 |
|---|---|
| acc_update_valid | 加速度计融合生效 |
| mag_update_valid | 磁力计融合生效 |
| gps_pos_update_valid | GPS位置融合生效 |
| gps_vel_update_valid | GPS速度融合生效 |
| gps_course_update_valid | GPS航迹角融合生效 |
| gps_heading_update_valid | GPS双天线航向融合生效 |
| zpu_update_valid | 零位置更新生效 |
| zvu_update_valid | 零速度更新生效 |
| zru_update_valid | 零角速度更新生效 |
| ext_pos_valid | 外部位置融合生效 |
| ext_vel_valid | 外部速度融合生效 |
| ext_heading_valid | 外部航向融合生效 |
| ddom_vel_valid | 里程计速度融合生效 |
| yz_zero_vel_valid | 汽车速度约束更新生效 |
| cent_accel_nhc | 汽车中心加速度约束更新生效 |
| rtcm_valid | RTCM数据接收生效 |
# GNSS info卫星信息
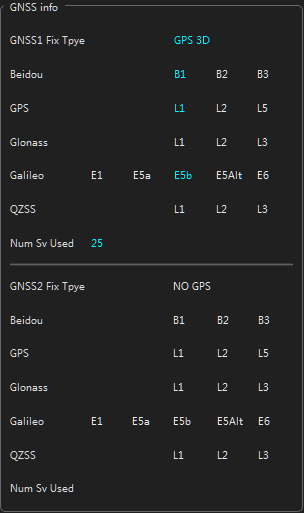
- GNSS1/2 Fix Tpye: 主天线GNSS状态(1)和辅天线的GNSS状态(2),具体定义可见:
- Beidou: 当前使用卫星中北斗卫星的频段,包含B1,B2和B3,使用该频段时字体为蓝色,否则为白色;
- GPS: 当前使用卫星中GPS卫星的频段,包含L1,L2和L5,使用该频段时字体为蓝色,否则为白色;
- Glonass: 当前使用卫星中Glonass卫星的频段,包含E1,E5a,E5b,E5Alt,E6,使用该频段时字体为蓝色,否则为白色; * Galileo: 当前使用卫星中Glonass卫星的频段,包含E1,E5a,E5b,E5Alt,E6,使用该频段时字体为蓝色,否则为白色;
- QZSS: 当前使用卫星中QZSS卫星的频段,包含L1,L2和L3,使用该频段时字体为蓝色,否则为白色;
* Num Sv Used: 当前天线接收的可用卫星数量;