# Data界面
该界面由 FDIsystems Log Viewer、FDI Diagnostic Telemetry 两部分组成:
# FDIsystems Log Viewer:上位机作图界面,具体见 第10.11节。
# FDI Diagnostic Telemetry:数据显示与记录界面。
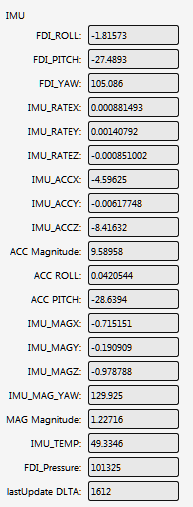
- Value Grid: 显示数据表,如下图所示,注意部分数据由于数据类型显示不全,如经纬度数据:
- Update Freq:配置Data界面可视化数据输出显示的频率,最高支持100Hz,默认10Hz;
Data set(s):数据输出类型,通过点击数据类型前面的方框来选择需要输出到图表中的数据,可以勾选多个。数据输出类型如下:
# IMU:惯导数据
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| IMU.FDI_ROLL | 融合后的横滚角 | 度(°) |
| IMU.FDI_PITCH | 融合后的俯仰角 | 度(°) |
| IMU.FDI_YAW | 融合后的航向角 | 度(°) |
| IMU.IMU_RATEX | 陀螺仪X 轴角速度 | 弧度/秒(rad/s) |
| IMU.IMU_RATEY | 陀螺仪 Y 轴角速度 | 弧度/秒(rad/s) |
| IMU.IMU_RATEZ | 陀螺仪 Z 轴角速度 | 弧度/秒(rad/s) |
| IMU.IMU_ACCX | 加速度计X 轴加速度 | 米/秒平方(m/s^2) |
| IMU.IMU_ACCY | 加速度计Y 轴加速度 | 米/秒平方(m/s^2) |
| IMU.IMU_ACCZ | 加速度计Z 轴加速度 | 米/秒平方(m/s^2) |
| IMU.ACC Magnitude | 加速度计输出加速度模 | 米/秒平方(m/s^2) |
| IMU.ACC ROLL | 仅由加速度计数据计算 | 度(°) |
| IMU.ACC PITCH | 仅由加速度计数据计算 | 度(°) |
| IMU.IMU_MAGX | 磁力计X 轴磁场强度 | 高斯(guass) |
| IMU.IMU_MAGY | 磁力计Y 轴磁场强度 | 高斯(guass) |
| IMU.IMU_MAGZ | 磁力计Z 轴磁场强度 | 高斯(guass) |
| IMU.IMU_MAG_YAW | 仅由磁力计数据计算的 | 度(°) |
| IMU.MAG Magnitude | 磁力计输出磁场强度模 | 高斯(guass) |
| IMU.IMU_TEMP | 传感器温度 | 摄氏度(℃) |
| IMU.FDI_Pressure | 气压计原始气压值 | 帕斯卡(Pa) |
| IMU.lastUpdate DLTA |
表 : IMU数据定义
# IMU_RAW:惯导原始数据
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| IMU_RAW.raw_acc_x | 加速度计原始X轴数据 | 米/秒平方(m/s^2) |
| IMU_RAW.raw_acc_y | 加速度计原始Y轴数据 | 米/秒平方(m/s^2) |
| IMU_RAW.raw_acc_z | 加速度计原始Z轴数据 | 米/秒平方(m/s^2) |
| IMU_RAW.raw_gyros_x | 陀螺仪原始 X 轴角速度 | 弧度/秒(rad/s) |
| IMU_RAW.raw_gyros_y | 陀螺仪原始 Y 轴角速度 | 弧度/秒(rad/s) |
| IMU_RAW.raw_gyros_z | 陀螺仪原始 Z 轴角速度 | 弧度/秒(rad/s) |
| IMU_RAW.raw_mags_x | 磁力计原始X 轴加速度 | 高斯(guass) |
| IMU_RAW.raw_mags_y | 磁力计原始Y 轴加速度 | 高斯(guass) |
| IMU_RAW.raw_mags_z | 磁力计原始Z 轴加速度 | 高斯(guass) |
表 : IMU_RAW数据定义
# UKF:SPKF 融合数据
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| UKF.UKF_POSN | 融合后的北向位置 | 米(m) |
| UKF.UKF_POSE | 融合后的东向位置 | 米(m) |
| UKF.UKF_POSD | 融合后的地向位置 | 米(m) |
| UKF.UKF_VELN | 融合后的北向速度 | 米/秒(m/s) |
| UKF.UKF_VELE | 融合后的东向速度 | 米/秒(m/s) |
| UKF.UKF_VELD | 融合后的地向速度 | 米/秒(m/s) |
| UKF.UKF_LON | 融合后的经度 | 度(°) |
| UKF.UKF_LAT | 融合后的纬度 | 度(°) |
| UKF.UKF_GYO_BIAS_X | 陀螺仪 X 轴动态零偏 | 弧度/秒(rad/s) |
| UKF.UKF_GYO_BIAS_Y | 陀螺仪 Y 轴动态零偏 | 弧度/秒(rad/s) |
| UKF.UKF_GYO_BIAS_Z | 陀螺仪 Z 轴动态零偏 | 弧度/秒(rad/s) |
| UKF.UKF_ACC_BIAS_X | 加速度计 X 轴动态零偏 | 米/秒平方(m/s^2) |
| UKF.UKF_ACC_BIAS_Y | 加速度计 Y 轴动态零偏 | 米/秒平方(m/s^2) |
| UKF.UKF_ACC_BIAS_Z | 加速度计 Z 轴动态零偏 | 米/秒平方(m/s^2) |
| UKF.UKF_QUAT_W | 融合后的四元数 | |
| UKF.UKF_QUAT_X | 融合后的四元数 | |
| UKF.UKF_QUAT_Y | 融合后的四元数 | |
| UKF.UKF_QUAT_Z | 融合后的四元数 |
表 : UKF数据定义
# UKF_STD:SPKF 融合数据标准差,滤波指标
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| UKF_STD.UKF_STD_VELN | 北向速度融合标准差 | 无 |
| UKF_STD.UKF_STD_VELE | 东向速度融合标准差 | 无 |
| UKF_STD.UKF_STD_VELD | 地向速度融合标准差 | 无 |
| UKF_STD.UKF_STD_POSN | 北向位置融合标准差 | 无 |
| UKF_STD.UKF_STD_POSE | 东向位置融合标准差 | 无 |
| UKF_STD.UKF_STD_POSD | 地向位置融合标准差 | 无 |
| UKF_STD.UKF_STD_BaX | 加表X轴零偏估计标准差 | 无 |
| UKF_STD.UKF_STD_BaY | 加表Y轴零偏估计标准差 | 无 |
| UKF_STD.UKF_STD_BaZ | 加表Z轴零偏估计标准差 | 无 |
| UKF_STD.UKF_STD_BgX | 陀螺仪X轴零偏估计标准差 | 无 |
| UKF_STD.UKF_STD_BgY | 陀螺仪Y轴零偏估计标准差 | 无 |
| UKF_STD.UKF_STD_BgZ | 陀螺仪Z轴零偏估计标准差 | 无 |
| UKF_STD.UKF_STD_Q1 | 四元数融合标准差 | 无 |
| UKF_STD.UKF_STD_Q2 | 四元数融合标准差 | |
| UKF_STD.UKF_STD_Q3 | 四元数融合标准差 | |
| UKF_STD.UKF_STD_Q4 | 四元数融合标准差 | |
| UKF_STD.UKF_STD_Euler_Roll | 横滚角融合标准差 | 无 |
| UKF_STD.UKF_STD_Euler_Pitch | 俯仰角融合标准差 | 无 |
| UKF_STD.UKF_STD_Euler_Yaw | 偏航角融合标准差 | 无 |
表 : UKF_STD数据定义
# GNSS:GPS 数据
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| GPS.Lat | GPS 原始纬度 | 度(°) |
| GPS.Lon | GPS 原始经度 | 度(°) |
| GPS.LocalN | 根据原始经纬度推算的 | 米(m) |
| GPS.LocalE | 根据原始经纬度推算的 | 米(m) |
| GPS.hAcc | 水平准确估计 | 米(m) |
| GPS.vAcc | 垂直准确估计 | 米(m) |
| GPS.course | GPS 原始航迹角 | 度(°) |
| GPS.height | GPS 原始高度 | 米(m) |
| GPS.pDOP | GPS 位置精度因子 | |
| GPS.tDOP | GPS 时间精度因子 | |
| GPS.velN | GPS 原始北向速度 | 米/秒(m/s) |
| GPS.velE | GPS 原始东向速度 | 米/秒(m/s) |
|---|---|---|
| GPS.velD | GPS 原始地向速度 | 米/秒(m/s) |
| GPS.lastPosUpdt | ||
| GPS.lastMessege | ||
| GPS.timeOfWeek | 周秒 | s |
| GPS.posN | 根据原始经纬度推算的 | 米(m) |
| GPS.posE | 根据原始经纬度推算的 | 米(m) |
表 : GPS数据定义
# RTK:移动站和移动基站数据,用于双天线模式
| 变量名 | 数据含义 | 单位 |
|---|---|---|
| RTK.Lat | 移动基站原始纬度 | 度(°) |
| RTK.Lon | 移动基站原始经度 | 度(°) |
| RTK.Height | 移动基站原始高度 | 米(m) |
| RTK.movingBaseVelN | 移动基站原始北向速度 | 米/秒(m/s) |
| RTK.movingBaseVelE | 移动基站原始东向速度 | 米/秒(m/s) |
| RTK.movingBaseVelD | 移动基站原始地向速度 | 米/秒(m/s) |
| RTK.movingBaseRelLength | 移动基站与基站之间的 | 米(m) |
| RTK.movingBaseRelHeading | 移动基站与基站形成的 | 度(°) |
| RTK.movingBaseRelN | 移动基站在以基站为原 | 米(m) |
| RTK.movingBaseRelE | 移动基站在以基站为原 | 米(m) |
| RTK.movingBaseRelD | 移动基站在以基站为原 | 米(m) |
| RTK.RoverRelLength | 双天线基线长度 | 米(m) |
| RTK.RoverRelHeading | 双天线航向 | 度(°) |
| RTK.RoverRelN | 双天线基线在北向的位 | 米(m) |
| RTK.RoverRelE | 双天线基线在东向的位 | 米(m) |
| RTK.RoverRelD | 双天线基线在地向的位 | 米(m) |
表 : RTK数据定义
- Value Chart: 显示数据曲线,首先在上述Data set(s)选择需要显示的数据类型,然后在左侧弹出的具体数据中,勾选需要显示的数据,最后随时间变化的曲线就实时显示在右侧,如下图所示:
上图示例中勾选了IMU数据类型,同时选中了陀螺仪X轴,Y轴以及Z轴数据作为曲线输出,颜色分别为蓝色,红色以及绿色,要改变曲线颜色,可以点击左下侧的Recolor按钮,想改变输出频率,点击左下角Update Freq框修改即可。
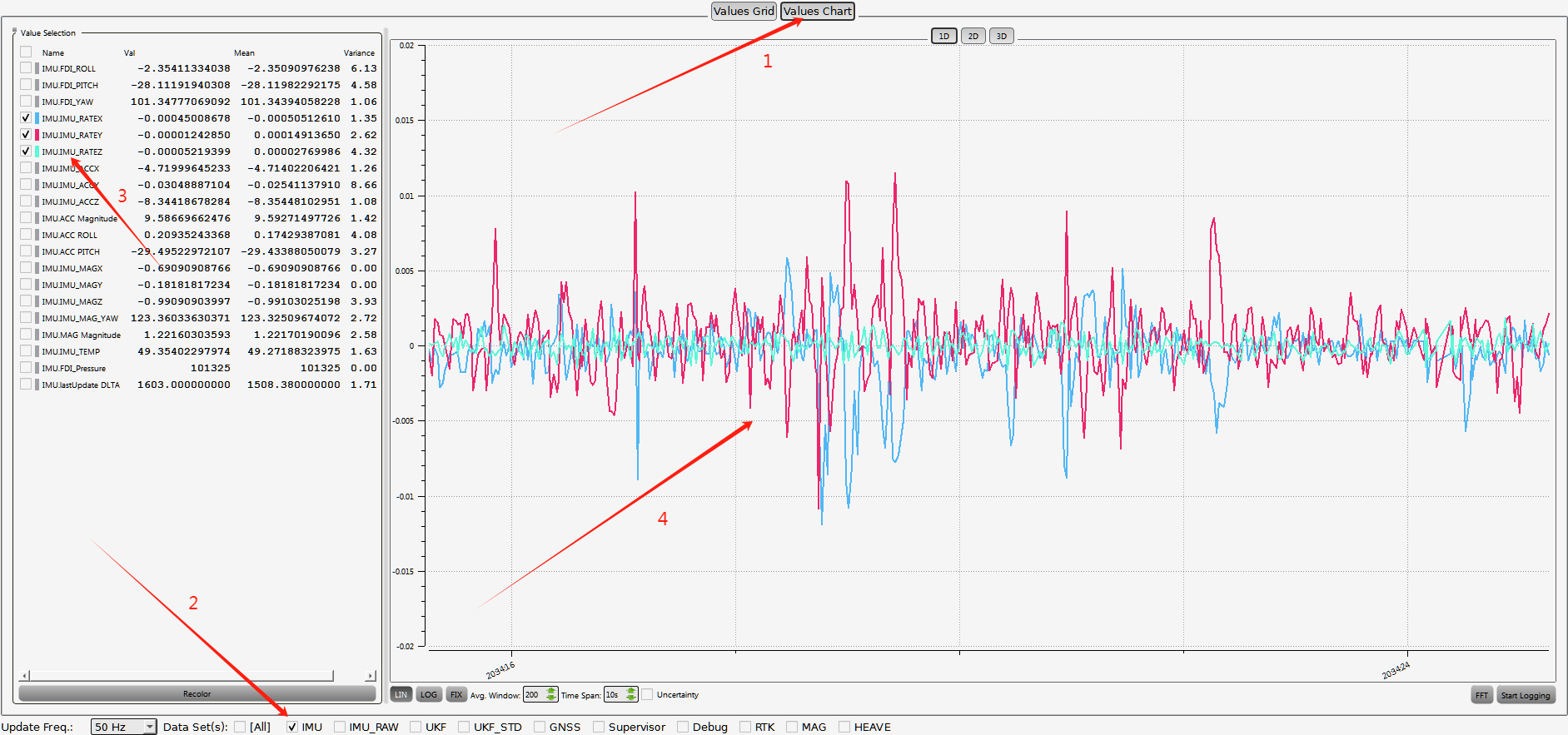
Value Selection:选中数据类型的数值显示界面,包含原始值 Val,平均值 Mean 和方差 Variance,勾选数据左侧的方框即可在右边显示对应的曲线。
Avg.Window,Time Span:纵坐标与横坐标的范围,可以进行动态调整。
FIX:自适应调整右侧曲线界面的纵坐标显示分辨率,鼠标右键点击曲线界面也能实现相同的效果。
1D、2D、3D:数据曲线图显示方式。默认的1D数据曲线图横坐标为时间戳,纵坐标为左侧 Value Selection 界面勾选数据;2D、3D数据曲线图需要在左下侧XY或者XYZ框中指定数据类型,然后系统以该指定数据作为X轴、Y轴和Z轴进行作图并实时显示。下面以在3D界面显示NED位置3D轨迹为例,进行说明:
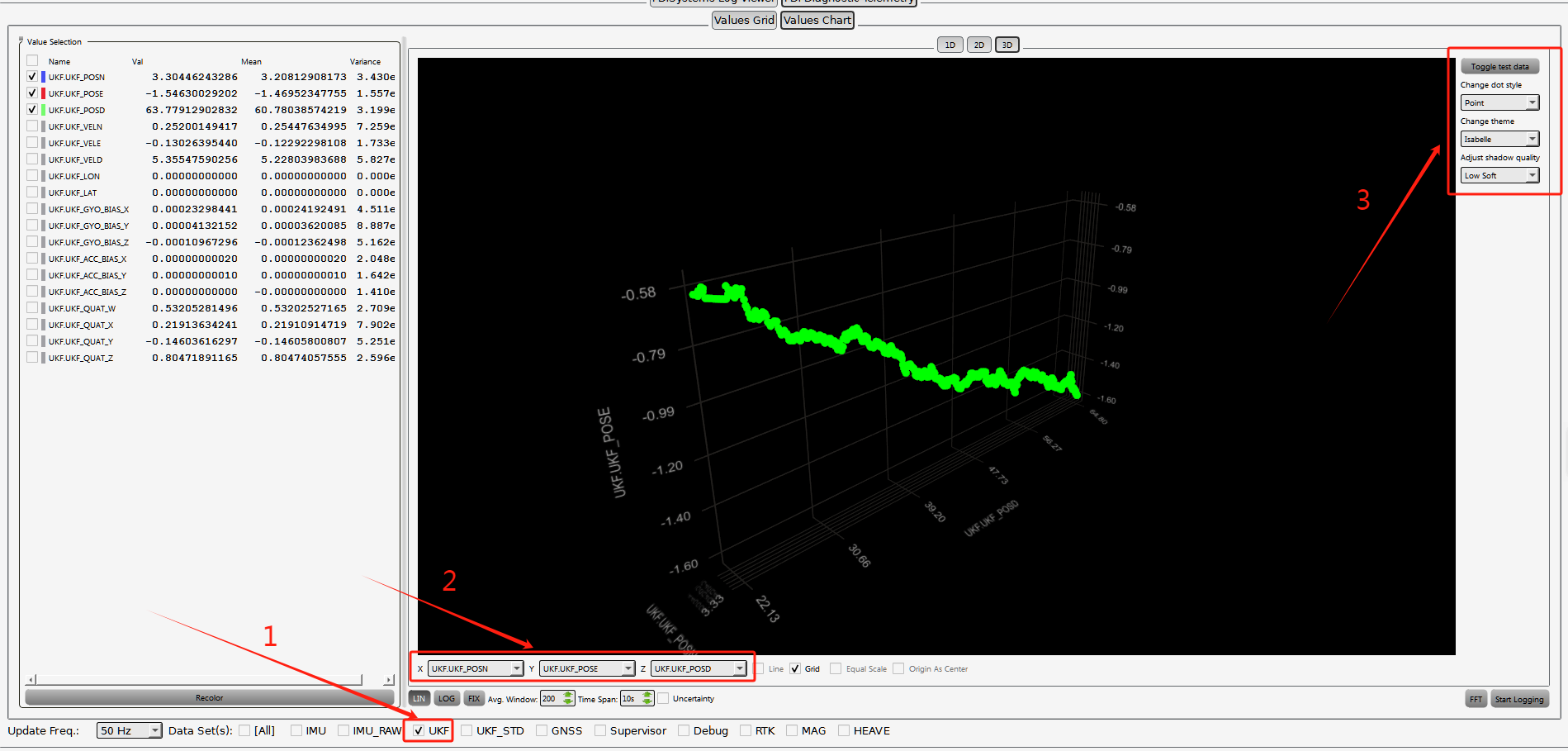
Step1:勾选下方的UKF数据类型;
Step2:在图左下测的xyz三轴数据框中选择类型,分别为UKF.UKF_POSN,UKF.UKF_POSE,UKF.UKF_POSD,此时3D曲线开始显示;
Step3:右上角红框可以配置3D曲线的一些属性:
Change dot style:曲线里的点的属性配置,默认为Point;
Change theme:3D曲线主题,默认为Ebony;
Adjust shawdow quality:阴影质量设置,默认为Low Soft;
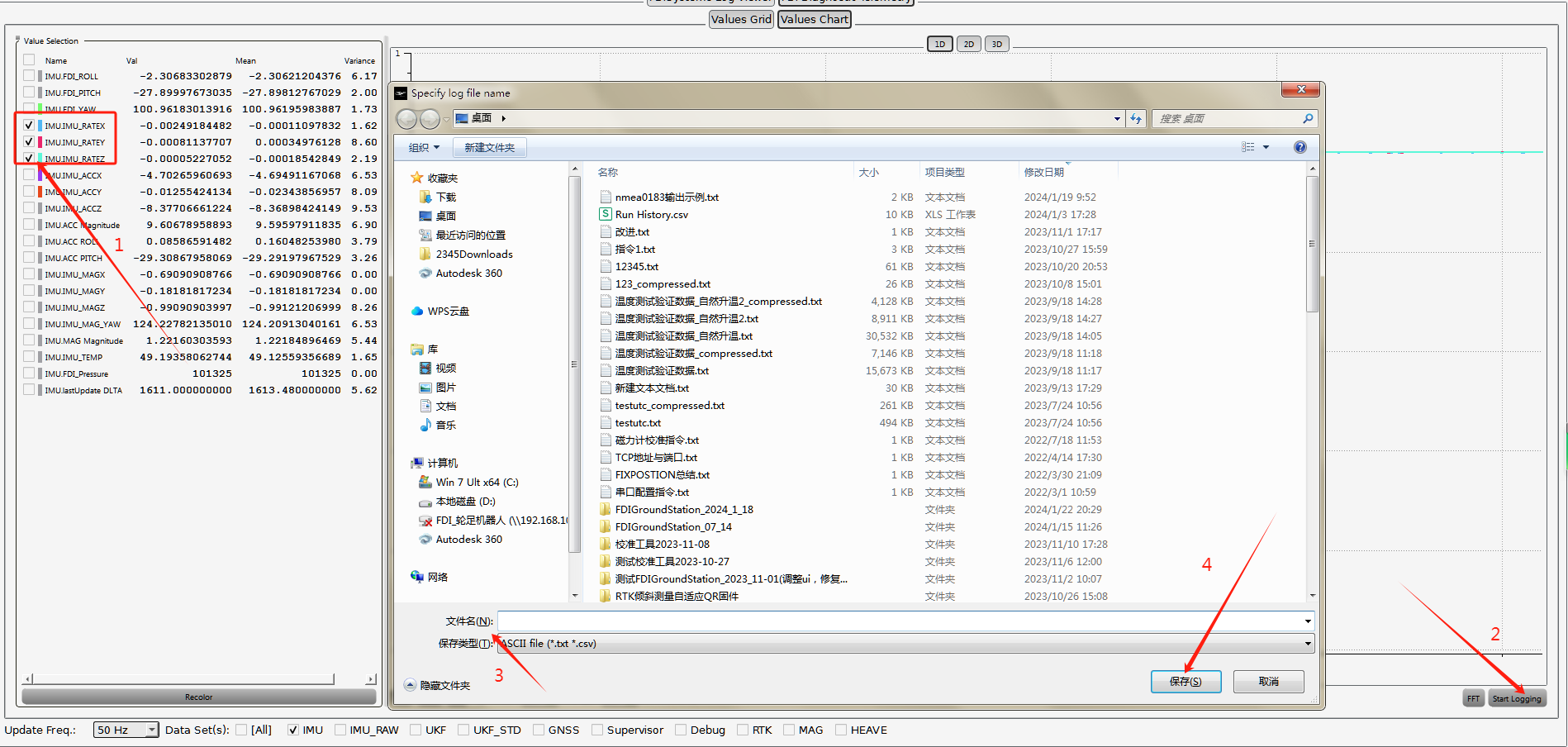
- Start Logging:数据记录功能,位于界面右下角,点击它将输出的数据以 txt 格式或者 log 格式保存到指定的位置中。注意需要将数据在左侧 Value Selection 界面中进行勾选,如下图所示,在弹出的文件框中选择保存的数据名称以及格式,最后点击保存上位机便开始记录左侧勾选中的数据,此时Start Logging变为stop Logging按钮,再次点击该按钮数据记录结束,同时生成对应的格式文件,txt 文件可以直接查看数据,log 文件可导入上位机作图。下图为values chart 界面,箭头所标准的数字为操作顺序。