# Epsilon系列入门指南
# 使用前的准备工作
# 检查产品配件清单
用户在上手Epsilon系列产品时,首先检查产品配件是否完整:
| Epsilon-A 接口实物图 | Epsilon-E 接口实物图 | Epsilon-N 接口实物图 | Epsilon-D 接口实物图 | Epsilon-D4G 接口实物图 | Epsilon-Dp900 接口实物图 |
|---|---|---|---|---|---|
 |  |  |  |  | |
| AHRS ,配件为一个主航插线 | 配件为一个主航插线,一个辅助航插线 | 配件为一个主航插线,SMA射频连接线以及一个gnss天线 | 配件为一个主航插线,和一个辅助航插线,两根射频连接线以及两个gnss天线 | 配件为一个主航插线,和一个辅助航插线,两根射频连接线以及两个gnss天线,一个4g天线,内置sim卡 | 配件为一个主航插线,和一个辅助航插线,两根射频连接线以及两个gnss天线,一个电台专用天线 |
epsilon-d4g 的sim卡一般内置,订购前需要商家预置或者客户邮寄
# 检查配套软件、SDK以及驱动环境
用户在购买产品后,FDISystems会提供配套的软件、SDK支持,包括:
- 上位机软件FDIGroundStation_稳定_2023_11_18,打开它需要电脑安装一些基础的c/c++库文件,目前仅支持在windows系统下运行;
- 常用SDK包,包含单片机环境的SDK,ros环境的SDK,matlab环境的SDK;
- 基本的驱动环境是需要安装的,需要安装CP210x的串口驱动,否则USB接上PC或工控机后无法正常识别串口号;
# 快速组装
# 配件实物图与连接说明

# 航插线缆
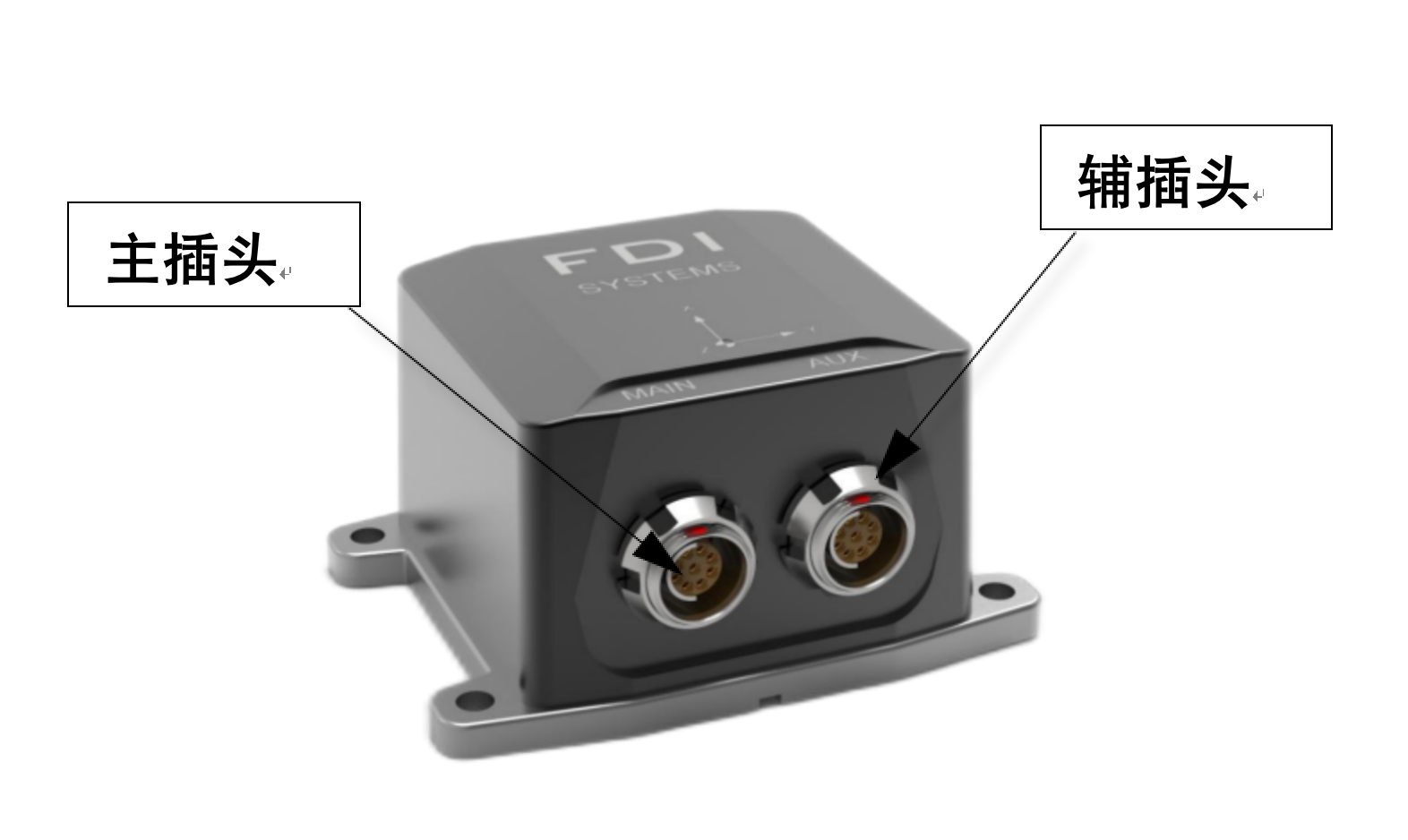
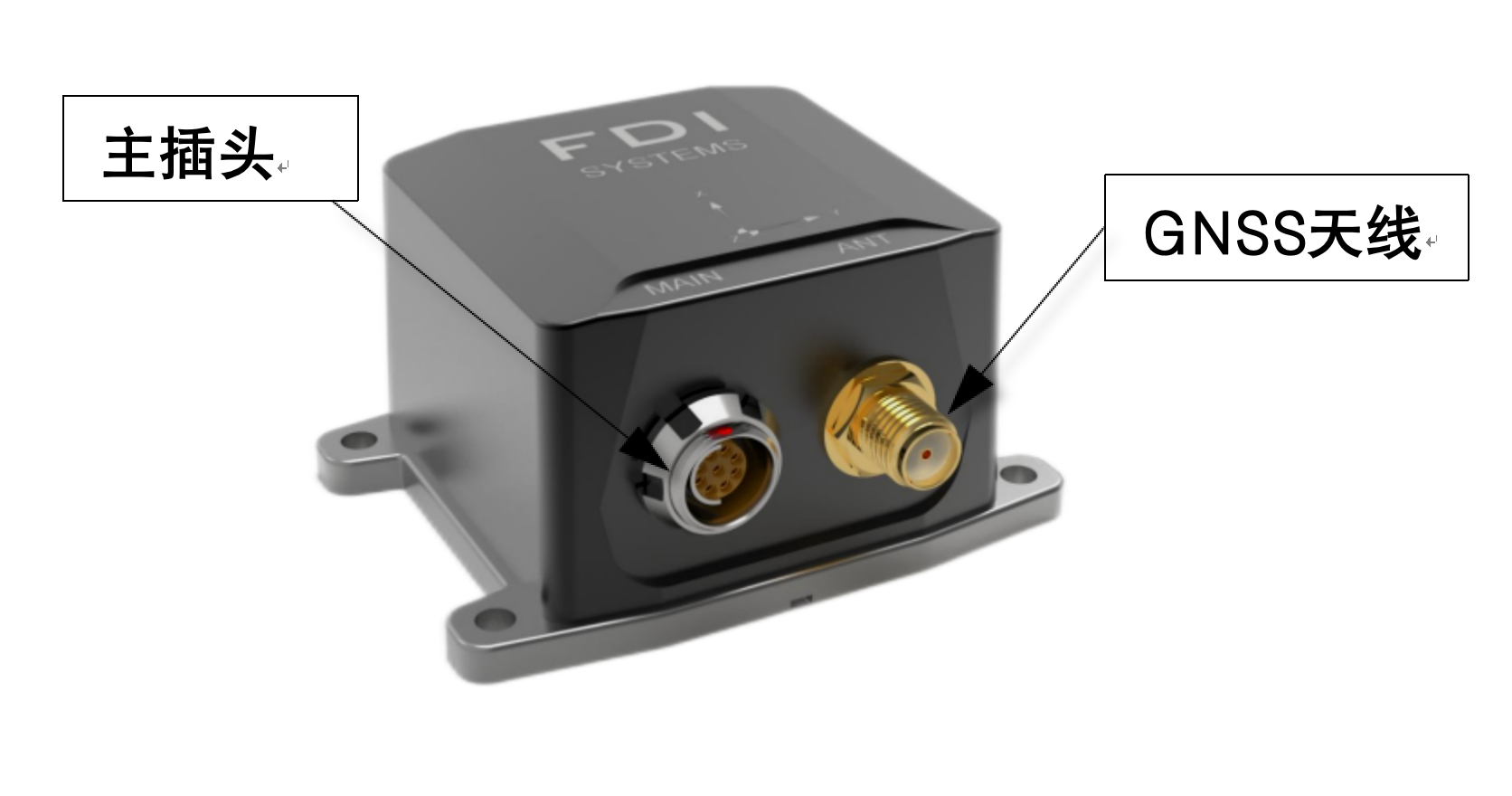
1) 0f-102-9P主航空插头线缆,是连接Epsilon系列主接口MAIN的线缆,具有RS232/SYNC/GPIO以及供电接口 DC线接电源,规格母头5525,供电范围8V-48V,模块内部具有射频组建在模式切换过程中需要电源有足够的功率支撑,电流至少3A;
2) 0f-102-9P辅航空插头线缆,用于接Epsilon系列辅接口AUX的线缆,具有RS422/CAN/USB 端口。
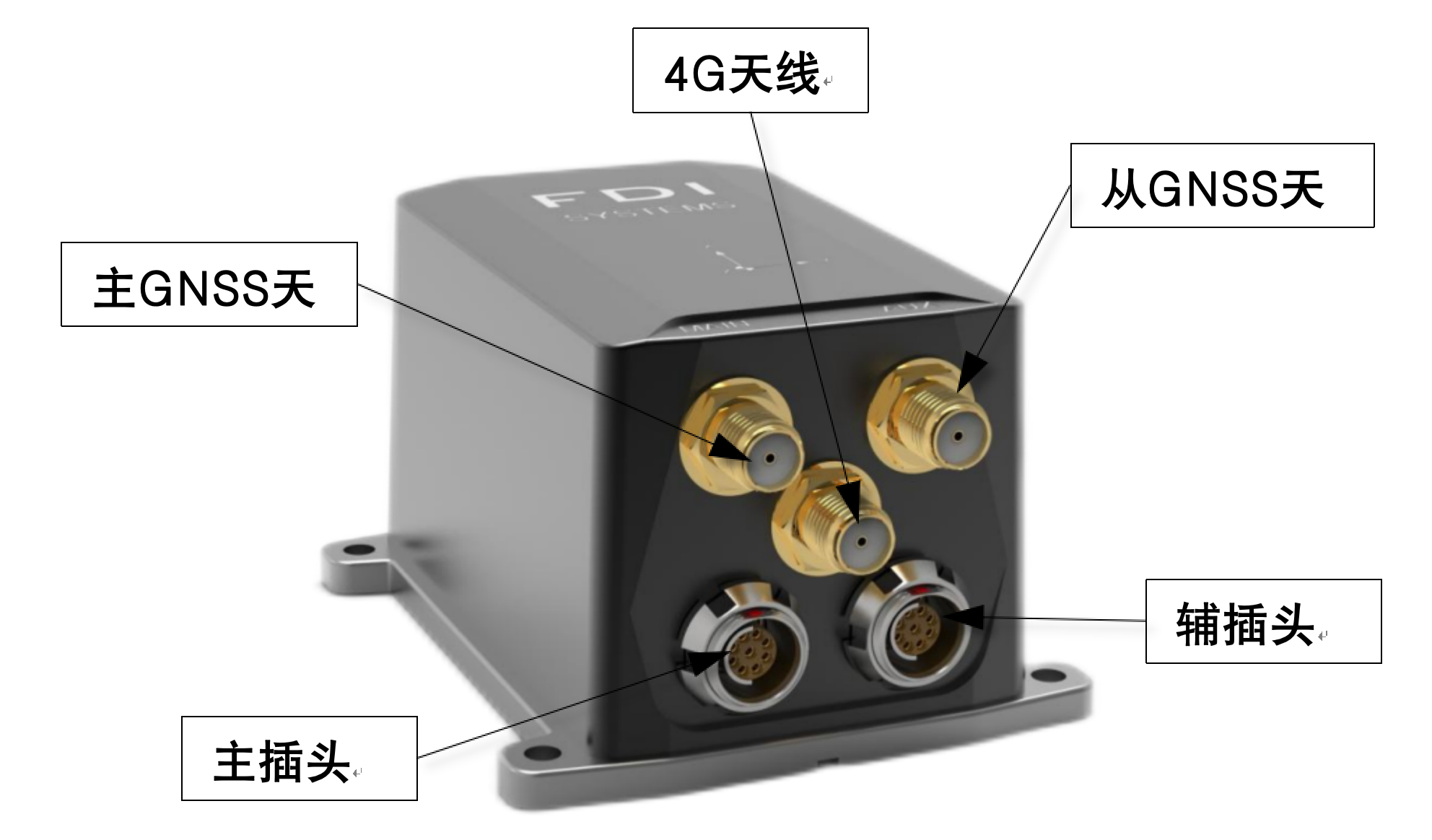
# 4G天线
- 4G天线直接接带4G联网功能模组的4G天线接口上,注意不要直接贴在金属物体上,否则会影响联网功能。
# SIM卡
图八:物联网卡实物图
- epsilon-d4g模块内置4g网络方式接收RTCM数据需要插卡,sim卡一般内置,订购前需要商家预置或者客户邮寄;
- 手机卡和物联网卡均支持;
- 如果使用的是物联网卡只能在一个设备使用,更换设备会锁卡,锁卡请联系飞迪后者运营商解锁方可使用;
- 部分物联网卡有定向限制,更换即可;
# 天线
- 每个天线会配转接线连接模块;
- 天线需要放在室外开阔处(模块可在室内),室外如果有高楼大厦收星效果不好建议将天线放置在高处(比如天台),天线必须放在装置上的话可用立柱加高天线;
- 远离干扰源,如电机干扰、射频干扰、开关电源等;
- 双天线模块支持只使用一个天线,但必须是主天线;
- 双天线模块的天线安装至少相隔0.4m,距离越大精度越高;
# 快速启动
# 基本操作
1) 将GNSS天线放置在载体高处并固定,可以清晰地看到天空。对于D系列模组,主天线与从天线之间尽量无遮挡,间隔(基线长度)越长越好,建议不低于0.4m;
2) 将GNSS天线与 Epsilon系列系列 模组连接,4G天线连接,插上SIM卡;
3) 将模组与计算机通过串口连接,通过DC母头正常供电;
4) 运行电脑上的 FDISYSTEMS 上位机软件 FDIGroundStation。
5) 点击 connect 按钮连接上位机,波特率默认为921600bps。
# GNSS天线安装
当在车载中安装 Epsilon系列 模组时,正确的安装和对准对于实现良好的性能至关重要。在您的应用场景中选择安装位置有许多要求需要满足,包括:
- Epsilon系列 模组应安装在不超过其工作温度范围的区域内。
- Epsilon系列 或保持一定的空气流动性,防止温度过高。
- Epsilon系列 模组的安装应远离振动。
- 在无法准确测量杆臂的情况下,Epsilon系列 模组与GNSS主天线的安装距离尽可能的小,从而尽可能的减小杆臂效应带来的影响。
- Epsilon系列 模组应安装在车载重心附近。
- 如果使用磁力计数据作为航向参考,则 Epsilon系列 模组应安装在距离动态磁干扰源至少20cm远的地方,比如远离大电流接线、大型电机等设备。
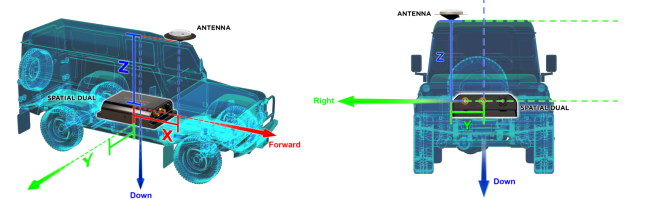
# GNSS天线对准
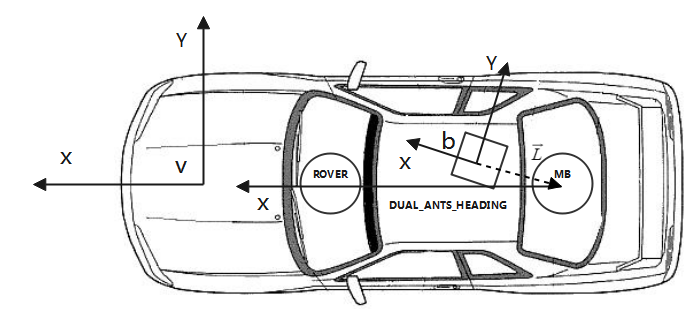
对准 Epsilon系列 模组最简单方法是安装轴与车身轴对齐。这意味着模组X轴向前指向车辆的正前部,而Z轴向下指向地面,如下图所示。天线偏移从 Epsilon系列 模组中心到主天线相位中心,并在模组坐标系下表示(X轴向前,Z轴向下)。天线偏移主要为了补偿杆臂速度,精确地设置天线偏移是非常重要的。不正确的GNSS天线偏移将导致转弯和角旋转情况下的性能下降。请注意,由于Z轴指向下,将天线安装在 DETA100系列 模组上方将导致负的Z轴偏移。
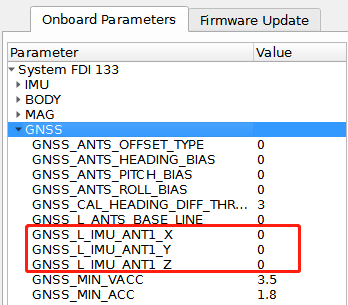
FDIGroundStation 提供了杆臂值的参数界面,以便您在测量杆臂数据后输入,如下图所示,具体内容见《Epsilon系列使用手册》10.9.3章节。
对于D系列模组,辅助天线ROVER应直接安装在主天线MB的前面,尽可能保持距离,如下图所示。距离越远,定向精度就越高,例如安装在汽车上。如果无法将辅助天线直接安装在主天线前面,则可以安装在另一个位置。在这种情况下,必须准确地测量双天线航向偏移并在上位机软件的参数表中进行配置,具体内容见《Epsilon系列使用手册》10.9章节。
# RTK账号配置
对于购买了Epsilon-D或者Epsilon-Dx模组的用户,FDIGroundStation 软件允许用户对差分账号进行配置,前提是用户购买了相关服务(千寻,移动高精度定位服务等)。配置界面位于 Config 界面的 DGNSS 内,具体内容见《Epsilon系列使用手册》10.9章节。
# 磁力计校准
如果用户在模组上电启动阶段就希望能获得较为准确的航向信息,那么磁力计校准是必须的,FDIGroundStation 软件提供了 Mag 6 side Calib、mag Calib 2D 和 mag Calib 3D 三种磁力计校准功能,一般推荐使用mag Calib 3D校准;当模块安装在车载,船载和机载上时, 磁力计无法在整个空间内运动,此时所有的 3D 磁力计校准方法不可用,可采用mag Calib 2D进行磁力计校准,具体内容见《Epsilon系列使用手册》10.8章节。
固件更改日志 →