# 模组安装
# 1安装启动
1.使用两颗M2螺丝将模组固定在您的测量对象上。
2.给 DETA10系列 模组电源线接口供电,带EVB底板的模组直接通过USB串口供电。
3.将 DETA10系列 模组与计算机连接,同时打开上位机软件 FDIGroundStation,然后点击 connect 按钮连接,默认波特率为921600bps。
4.模组上电运行时默认需要保持2s的静止以计算静态零偏,否则输出姿态可能存在漂移现象,具体说明见12章问题四。
5.该系统现在已准备好可以使用了。
# 2安装和对准
# 安装方式
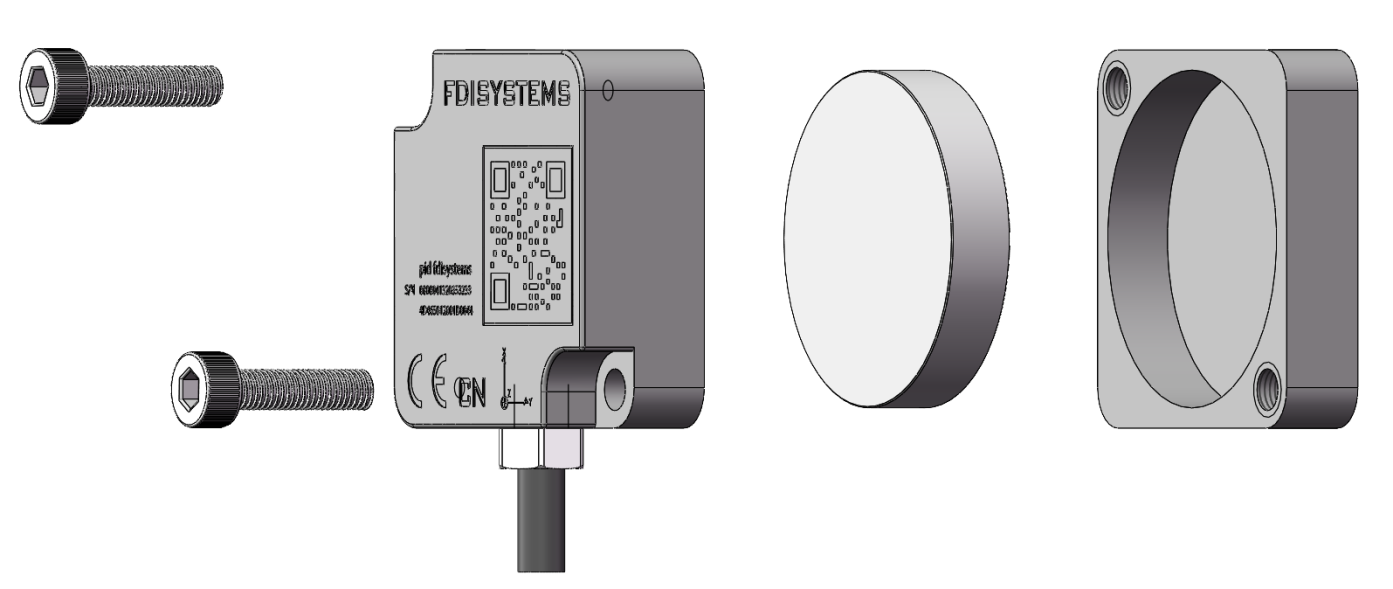
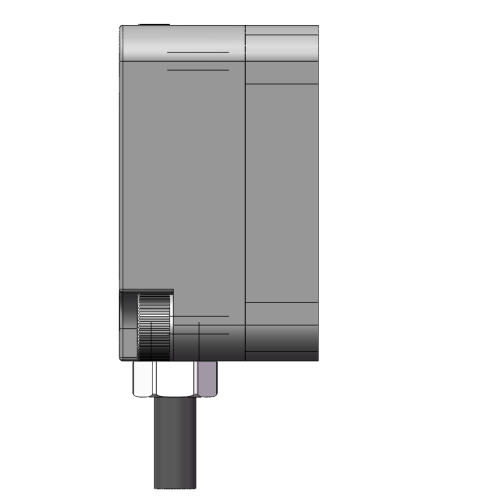
# 磁吸套装
# M8快接套装
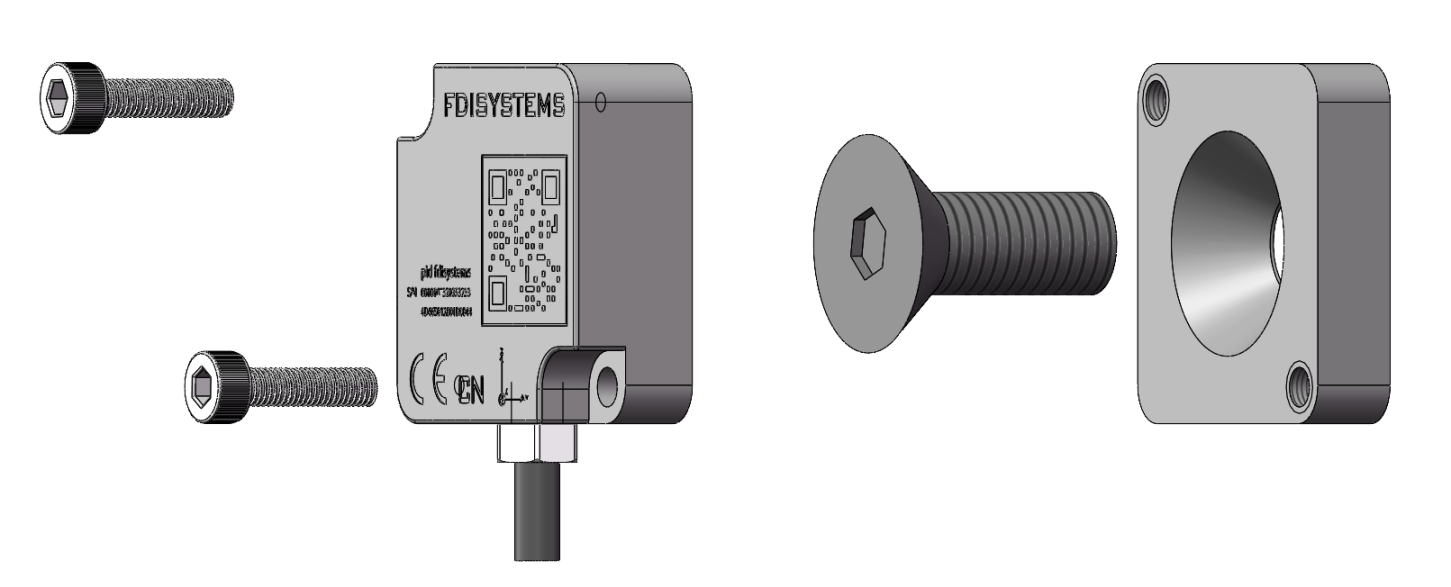

当在载体中安装 DETA10系列 模组时,正确的安装和对准对于实现良好的性能至关重要。在您的应用场景中选择安装位置有许多要求需要满足,包括:
1.DETA10系列 模组应安装在不超过其工作温度范围的区域内。
2.DETA10系列 模组的安装应远离振动。
3.外接GNSS时,条件允许的话,DETA10系列 模组与GNSS天线的安装距离尽可能的小,从而尽可能的减小杆臂效应带来的影响。
4.DETA10系列 模组应安装在载体重心附近。
5.如果使用磁力计数据作为航向参考,则 DETA10系列 模组应安装在距离动态磁干扰源至少20cm远的地方,比如大电流接线,大型电机等设备。
# 2.1坐标系标定与对准
在使用 FDISYSTEMS 的惯导模组和其他传感器进行融合结算时,不同传感器坐标系之间的标定尤为重要,这直接影响多传感器融合的性能。比如使用惯导与相机,激光雷达进行建图定位和导航时,最先需要进行的工作就是将三个传感器的坐标系进行联合标定。
在上位机软件Data界面和fdilink协议输出的数据包中,DETA10系列 模组的坐标系与外壳上标注的丝印一致,为北东地(NED)坐标系,其中X轴指向北,Y轴指向东,Z轴朝下;而在ros驱动中,为了与ros定义的坐标系保持一致,三轴陀螺仪和三轴加速度计的坐标系变为东北天(ENU)坐标系,其外壳丝印上标注的X轴与ros下定义的X轴一致,指向东,ros下定义的Y轴,Z轴与丝印标注相反,分别指向北和天。
对于外接 GNSS 设备的用户,如果 DETA10系列 模组安装位置偏离GNSS天线太多,则需要对杆臂进行标定,杆臂是定义在 DETA10系列 模组坐标系XYZ下的(北东地),原点位于模组中心。需要注意的是,由于模组定义的Z轴朝下,一般GNSS天线安装位置高于模组,因此杆臂的Z轴输入一般为负值。
FDISYSTEMS 允许用户对模组坐标系(三轴陀螺仪,三轴加表以及三轴磁力计)进行自定义设定,通过上位机 FDIGroundStation 软件的坐标系旋转功能实现。
# 3磁力计
DETA10系列 模组包含磁力计,它用来确定模组上电时的偏航角(可关闭)。建议在距离动态磁干扰源至少 20cm 的地方安装 DETA10系列 模组。动态磁干扰源包括电机、大电流布线和运动的含有磁性的金属物件。当您仅使用磁力计初始化模组上电时的偏航角时,磁干扰不会导致模组的航向误差。磁力计在使用前必须进行软磁和硬磁校准,具体见第10.7节。FDIsystems 提供了全套的2D/3D磁校准算法,可以简单快速的完成校准。
# 4振动抑制
与其他惯性系统相比,DETA10系列 模组能够容忍高水平的振动。这是由于其独特的陀螺仪设计和内置的划船圆锥算法。然而,模组所能容忍的振动量是有限的,而大程度的振动可能会导致模组的精度降低。
当将 DETA10系列 模组安装到振动平台时,有几种选择。建议首先尝试安装 DETA10系列 模组,看看它是否能承受振动。上位机软件 Data 界面中的 IMU 数据视图可以让您充分了解振动有多严重,请参见第10.4.3节。如果振动导致传感器超出传感器范围,则需要增加传感器范围。 如果 DETA10系列 模组无法承受振动,则有以下几种选项:
1.试着找到一个振动较小的安装点。
2.DETA10系列 模组下方可以安装一小块扁平的橡胶。
3.DETA10系列 模组可以安装在板上,然后通过隔振装置安装到平台上。