
# DETA10规格
# 导航规格
# DETA10导航性能
| NAVIGATION | Deta10 V | Deta10 A | Deta10 N |
| 俯仰/横滚 (静态) | 0.05 ° RMS | 0.05 ° RMS | 0.05 ° RMS |
| 俯仰/横滚 (动态)3 | 0.1 ° RMS | 0.1 ° RMS | 0.1° RMS |
| 相对航向 1(静态) | 2 ° /hr | 2 ° /hr | 2 ° /hr |
| 相对航向 1(动态) | 5 ° /hr | 5 ° /hr | 5 ° /hr |
| 绝对航向(磁辅助)2 | - | 0.5 ° RMS | 0.5° RMS |
| 水平位置3 | - | - | 1.5 m RMS |
| 速度精度 | - | - | ±0.05 m/s |
| 角度分辨率 | < 0.01 ° | < 0.01° | < 0.01° |
| 角度重复性 | < 0.1° | < 0.1 ° | < 0.1 ° |
| IMU数据输出频率 | 400 Hz | 400 Hz | 400 Hz |
| 导航数据输出频率 | 200 Hz | 200 Hz | 200 Hz |
表 : deta10导航性能规格 , 对DETA10 plcc 封装的模块不进行转台和温度校准,原因是因为回流焊工艺经过高温会破坏传感器的校准参数,所以plcc封装传感器精度要低于其他两种封装!
# 传感器规格
| 参数 | 加速度计 | 陀螺仪 | 磁力计 |
| 量程 | ±16 g | ±2000 °/s | ±1000uT |
| 刻度因子误差 | 300ppm | 1,000 ppm | - |
| 零偏不稳定性 | 40ug | < 10 °/hr | - |
| 线性度 | < 0.1 % FS | < 0.1 % FS | 0.1 % FS |
| 噪声密度 | 75µg/√Hz | 0.0028º/s /√Hz | 140 µGauss/√Hz |
| 带宽 | 500 Hz | 500 Hz | 400 Hz |
| 正交性误差 | ±0.05 ° | ±0.05 ° | ±0.1 ° |
表: 传感器规格
# 接口&电气
| 接口&电气 | 环境 | |||
| 主接口 | UART (TTL)*4, CAN *1(外接转换器) | 操作温度 | -40°C to +85°C | |
| 拓展接口 | GPIO*2:1PPS input/output 、Event | 震动 | 10 g RMS [20 - 2 kHz] MIL-STD-810G | |
| 输入电压 | PLCC20 :3.3v | A:180mW, N:220 mW | 冲击 | 20,000 g | |
| BOX:3.6-5.5v | A:180mW, N:220 mW | MTBF | 50,000 hours | ||
| 防水:5.5-28v | A:180mW |
表 : deta10接口规格
# 结构规格
| Model | V | A | N |
| PLCC20 | DETA10-V | DETA10-A | DETA10-N |
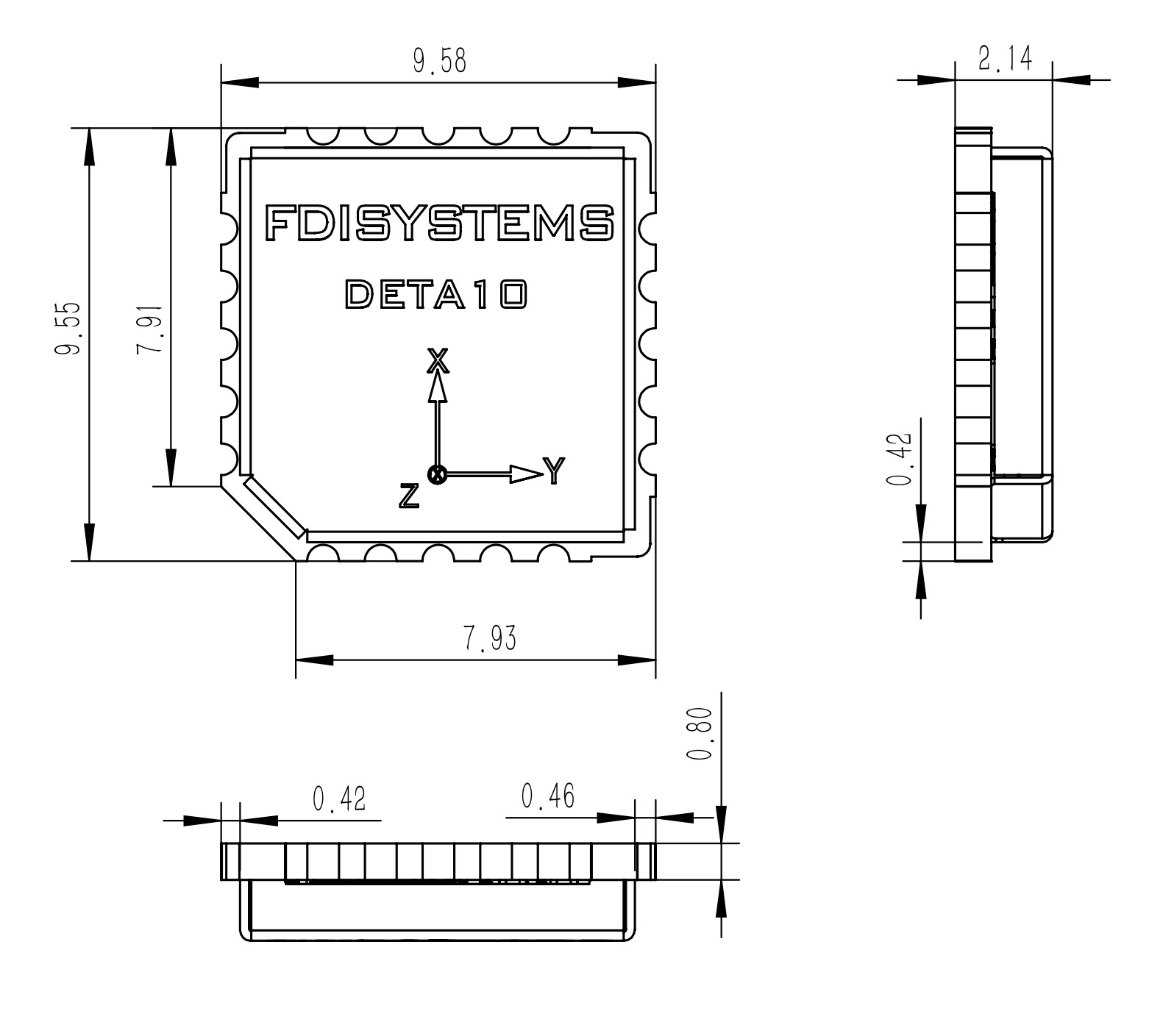
| Size | Weight | 9.5 x 9.5 x 2.6 m | 1 g | 9.5 x 9.5 x 2.6 m | 1 g | 9.5 x 9.5 x 2.6 m | 1 g |
| BOX | DETA10-VP | DETA10-AP | DETA10-NP |
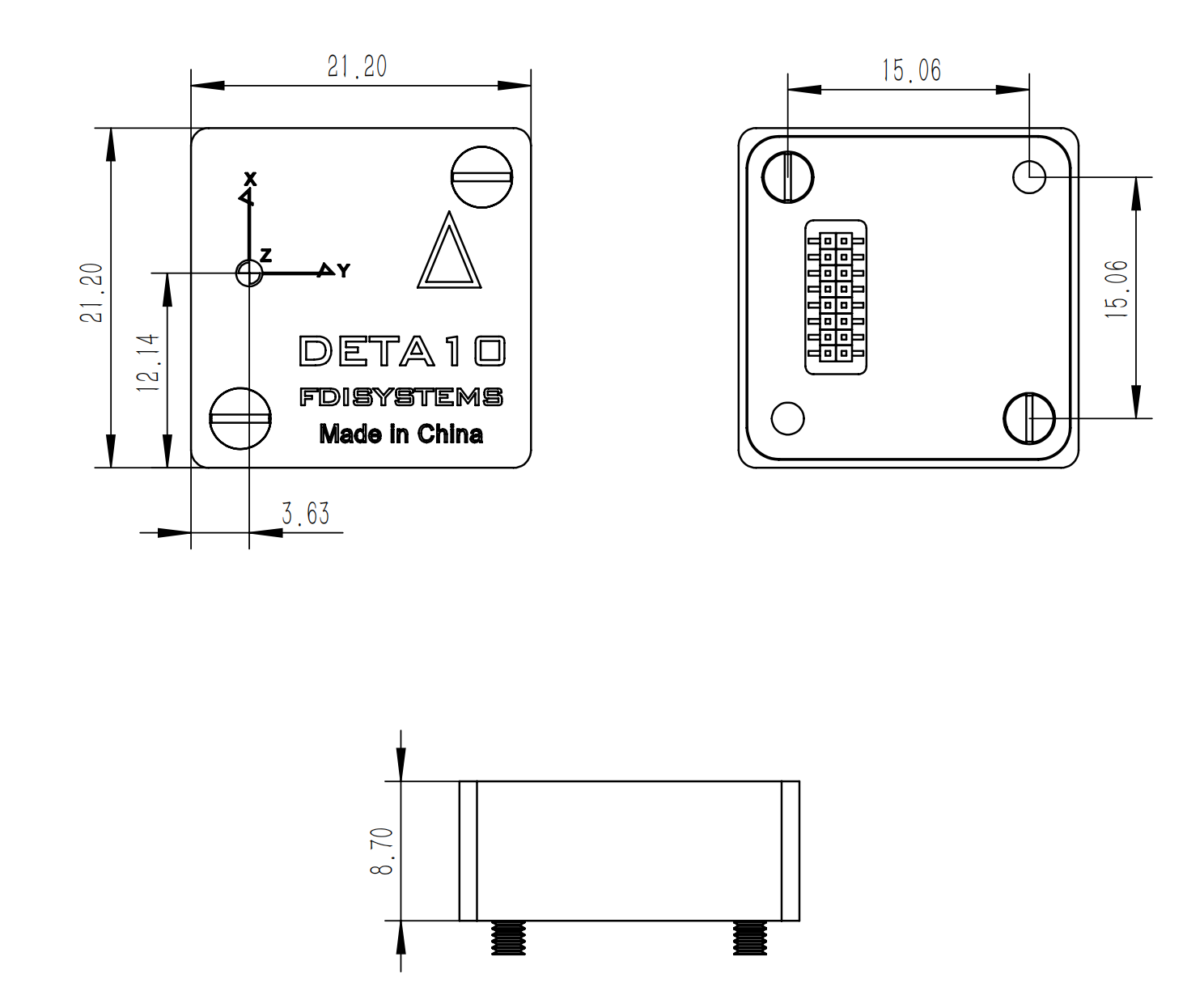
| Size | Weight | 21.2x21.2x8.5mm | 6g | 21.2x21.2x8.5mm | 6g | 21.2x21.2x8.5mm | 6g |
| PW防水 | DETA10-VPW | DETA10-APW | / |
| Size | Weight | 28x28x10.5mm | 15g | 28x28x10.5mm | 15g | / |
表 : deta10 结构规格
# 通讯规格
| 输入输出 | |
| 协议 | FDILink Binary, FDILink ASCII, NMEA |
| 拓展接口 | 欧拉角 (Yaw, Pitch, Roll); 四元数; 位置; 速度; 方向余弦矩阵; 加速度,角速度,磁场向量 |
| 融合引擎 | 自适应非线性Sigma-point 卡尔曼滤波器; 用户可配置辅助观测源 参数在线估计; 野值和异常检测隔离; 自适应滤波 |
| 外部辅 助 | GNSS, RTK,气压计,空速管, 里程计 |
| 指令配 置 | 支持串行指令配置:重启、校准、模式切换等 |
| 数据同 步 | Sync-In, Sync-Out I/O pins; GPS PPS, 30 ns RMS, 60 ns 99% |
表 : deta10输入输出规格
# 结构图纸
# DETA10 plcc20封装尺寸图
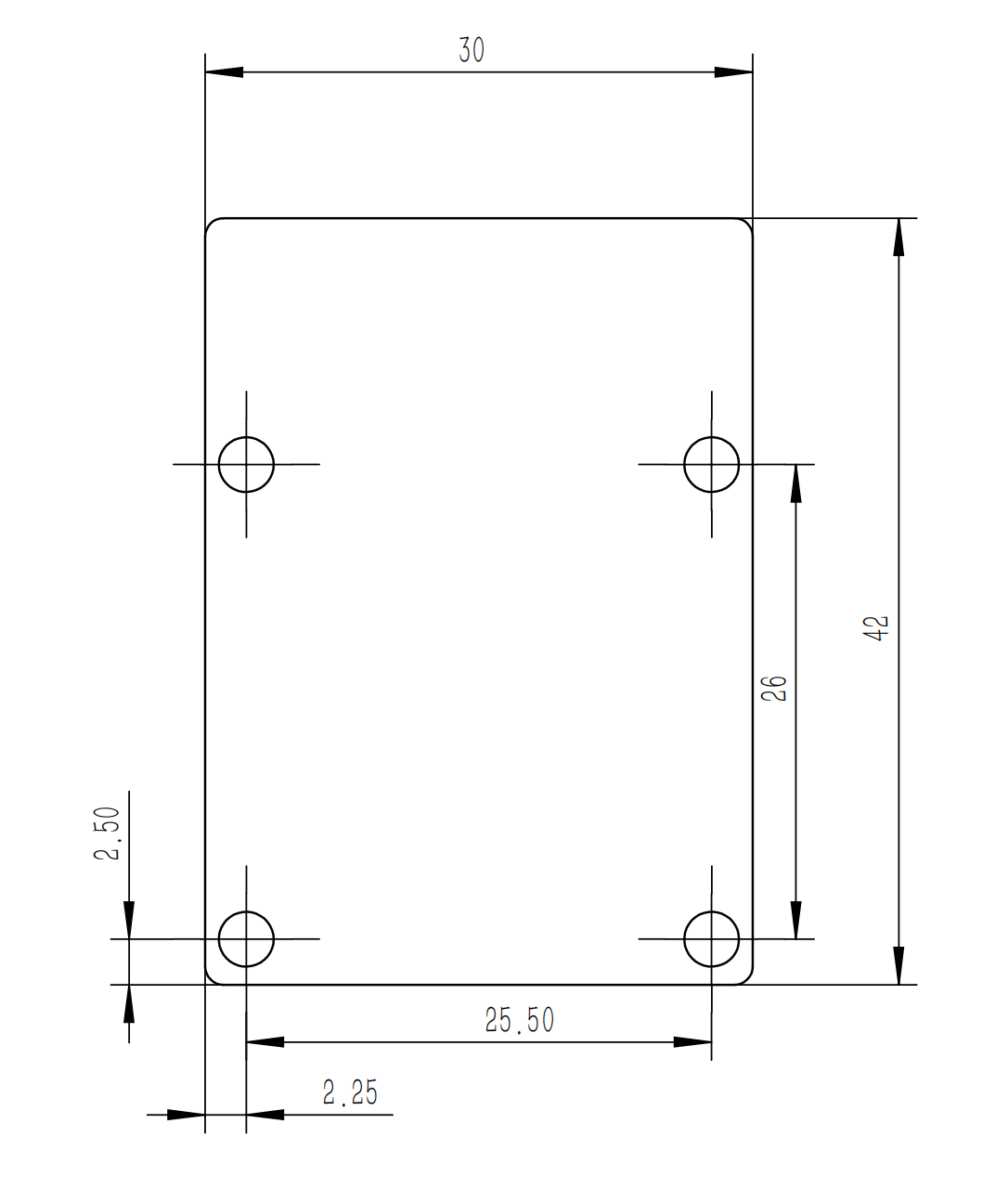
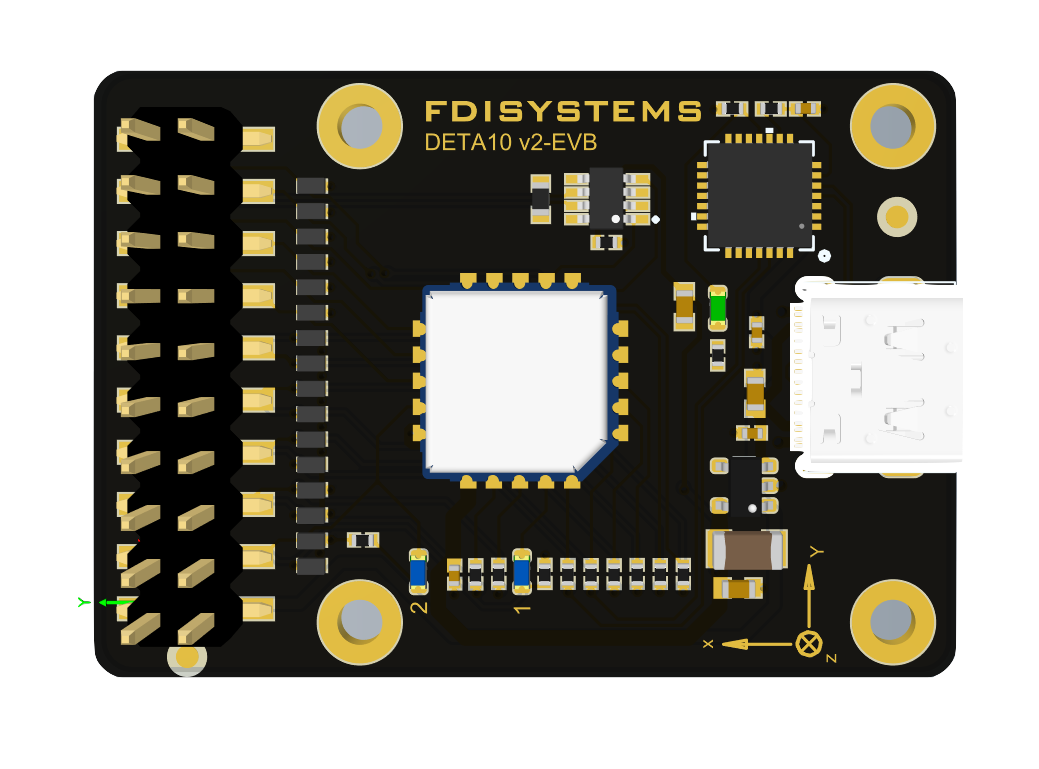
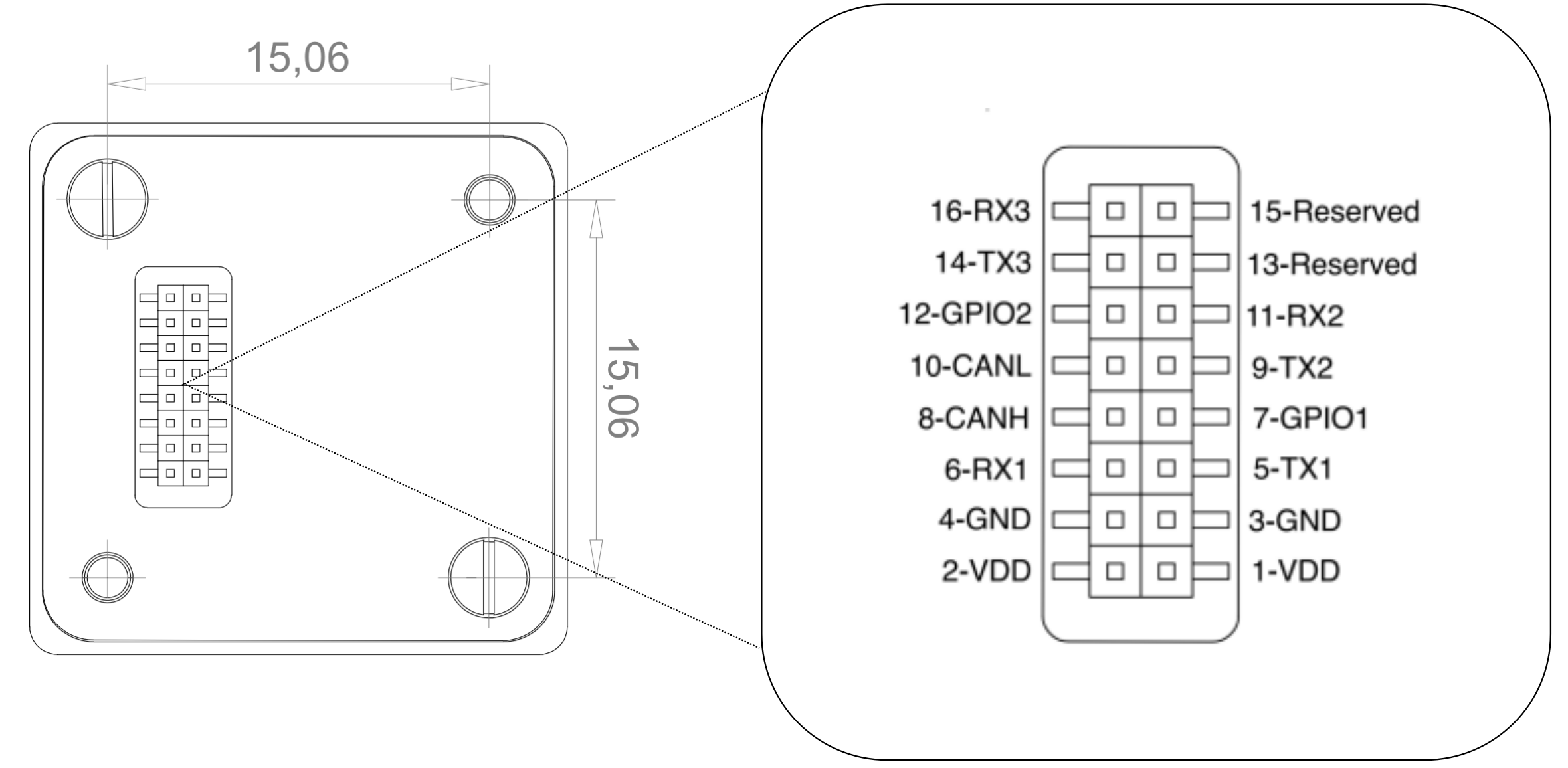
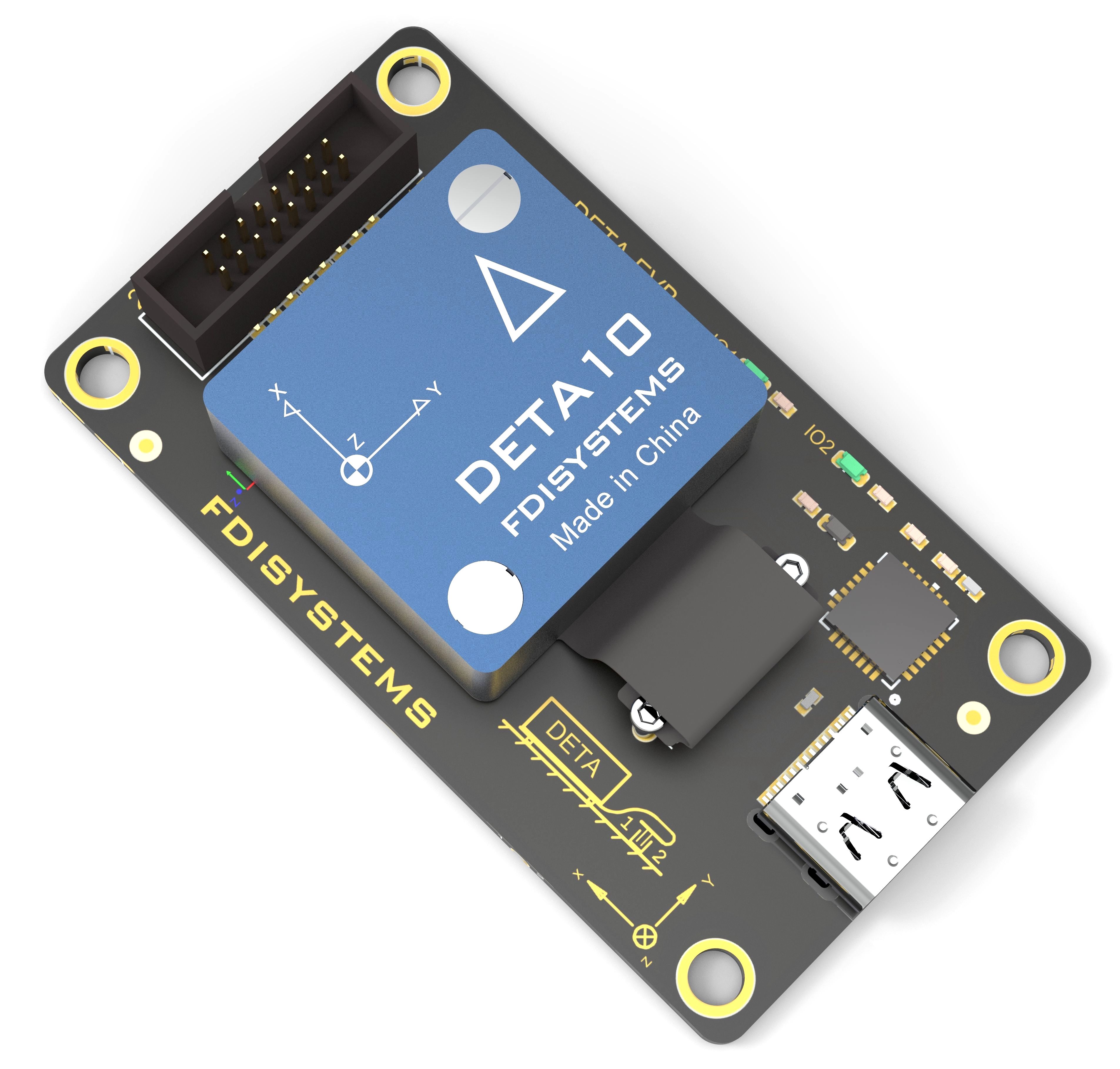
# DETA10 plcc20 EVB尺寸图
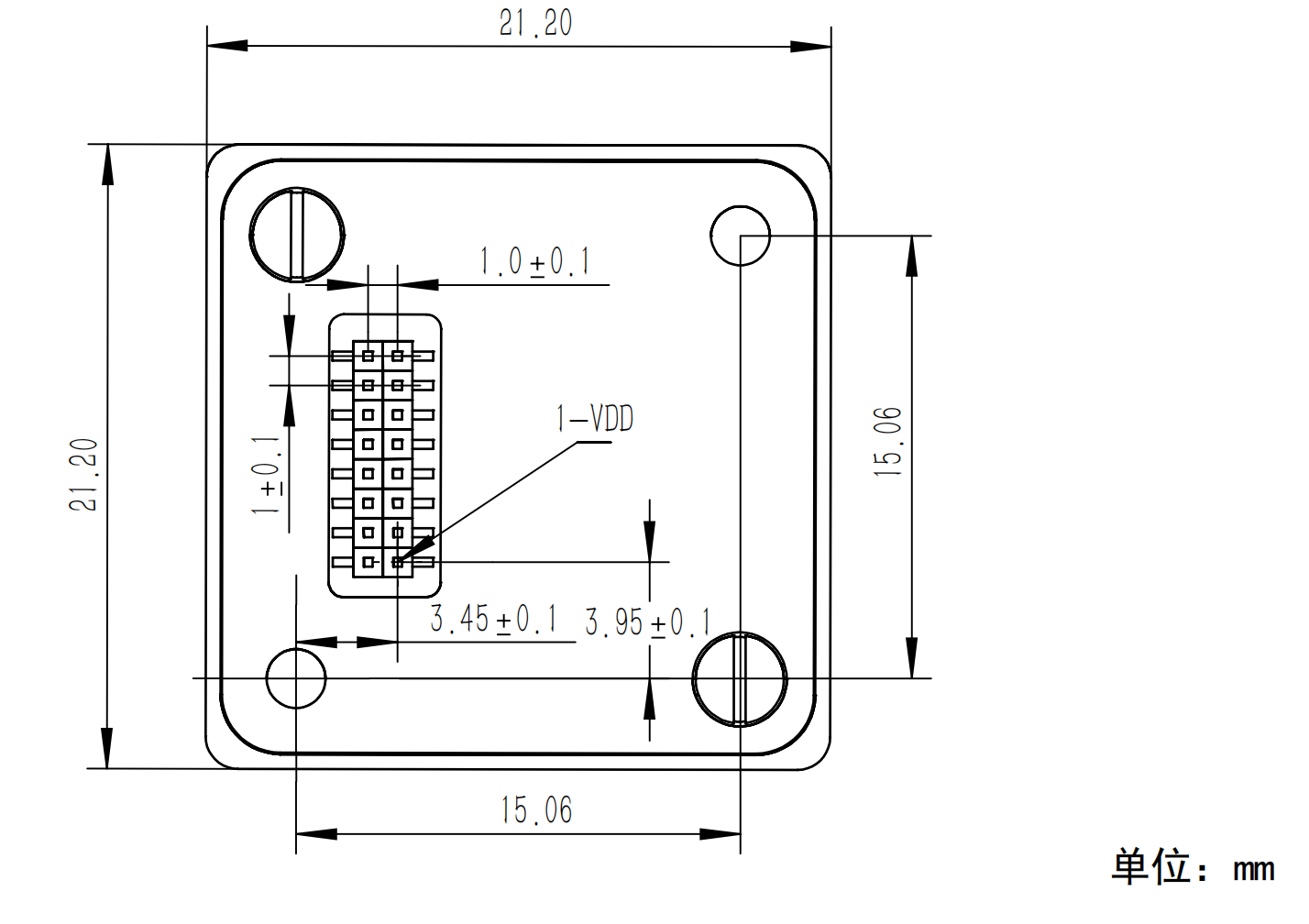
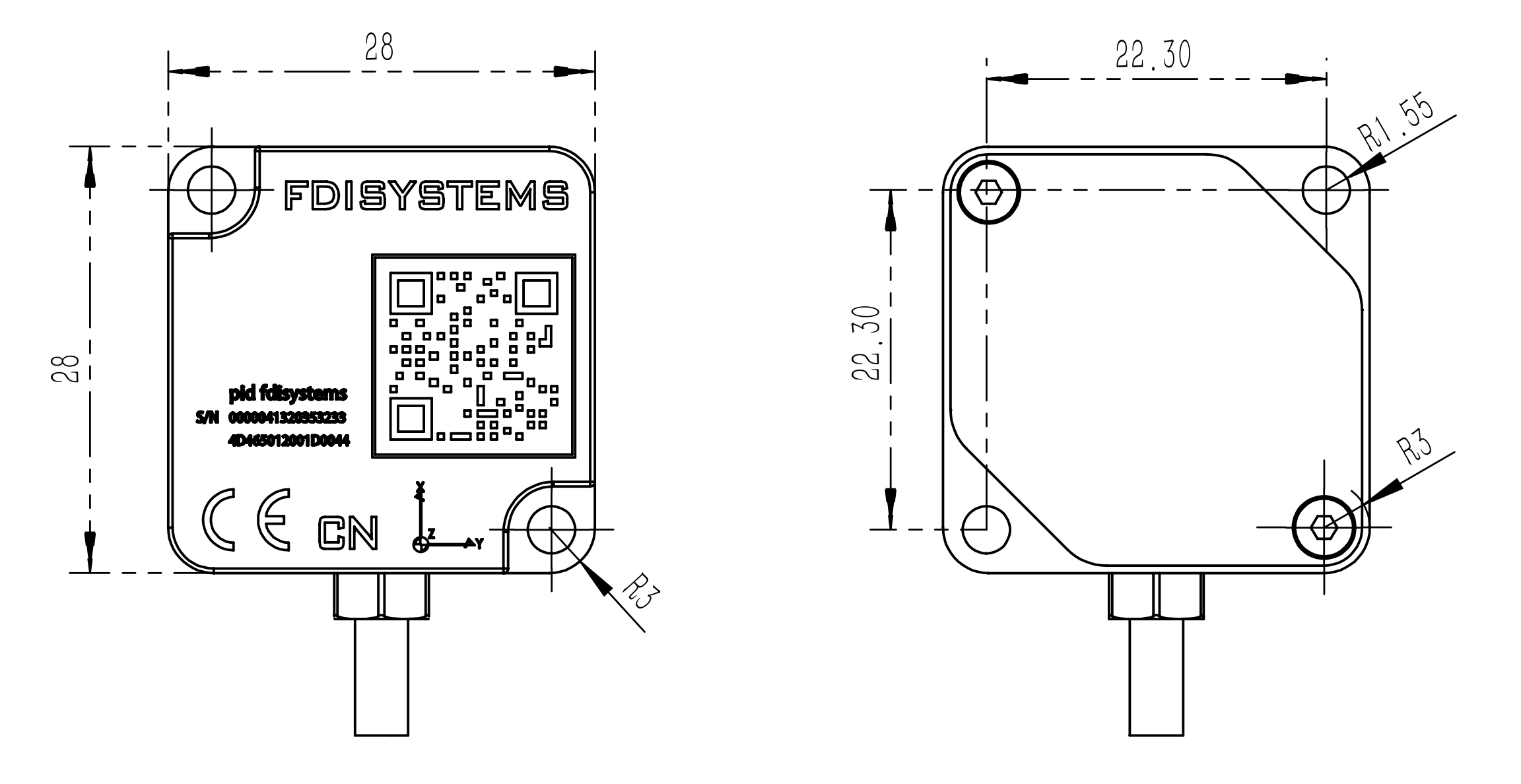
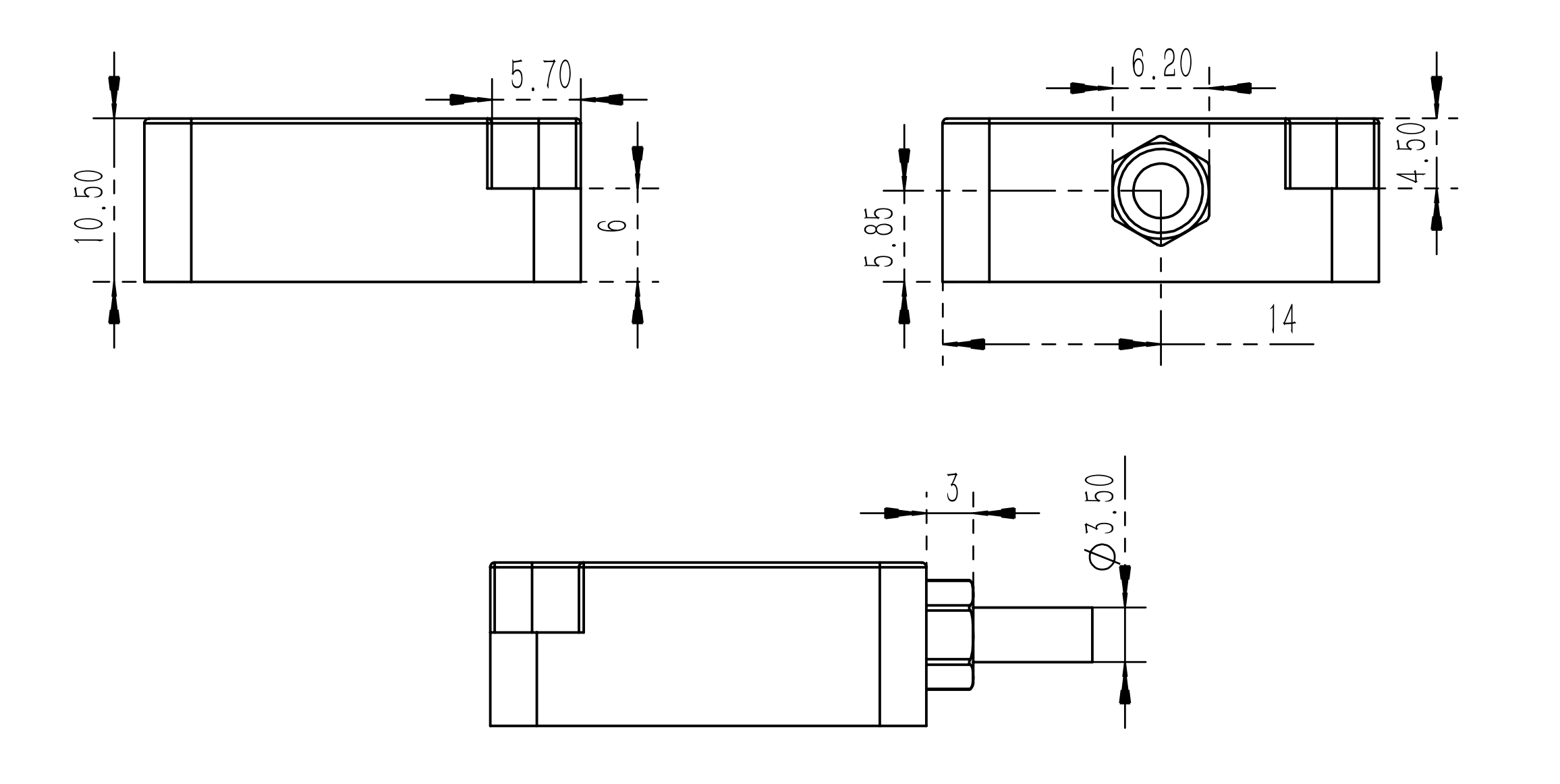
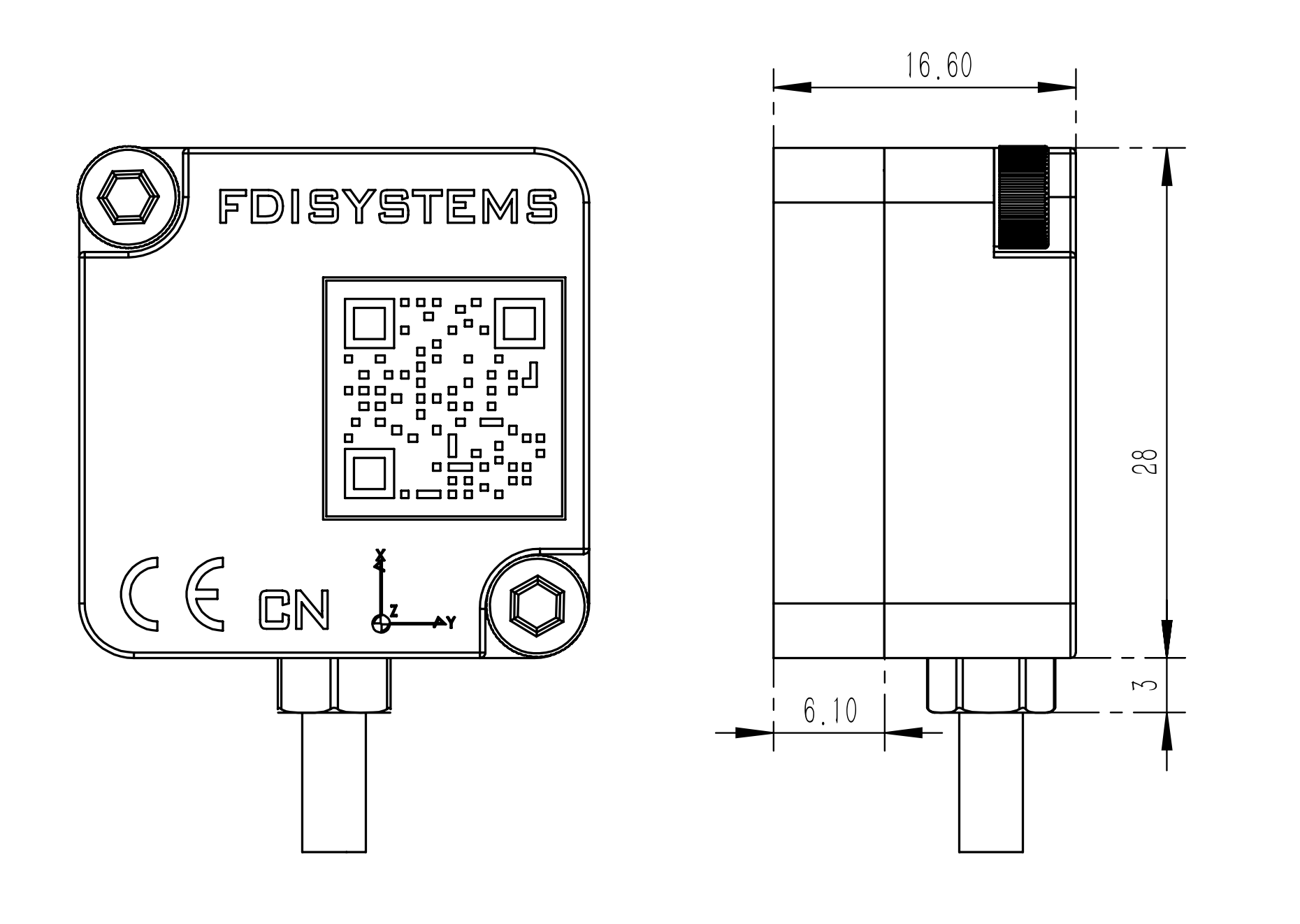
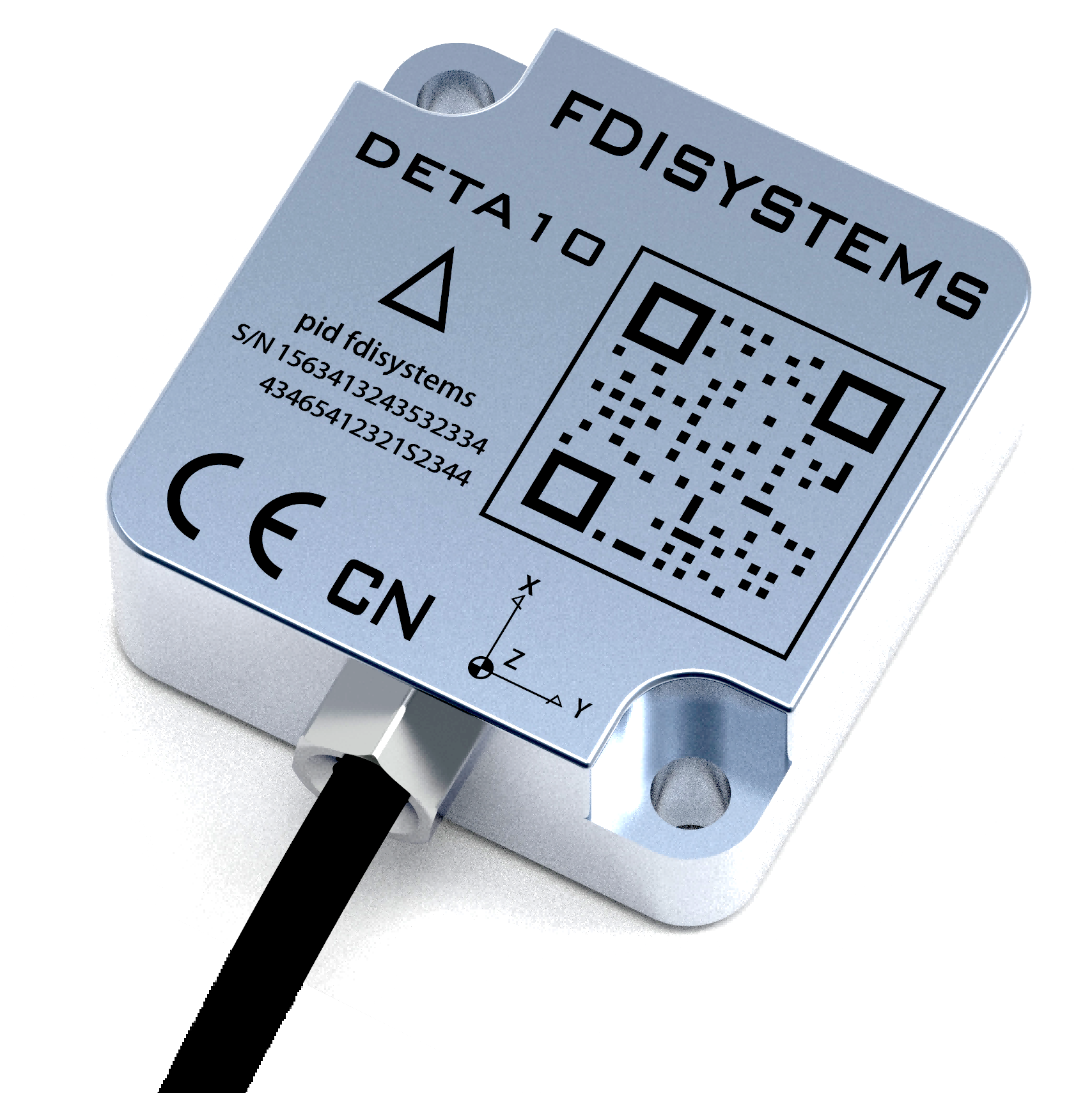
# DETA10/20/30/40 铝合金外壳封装尺寸图
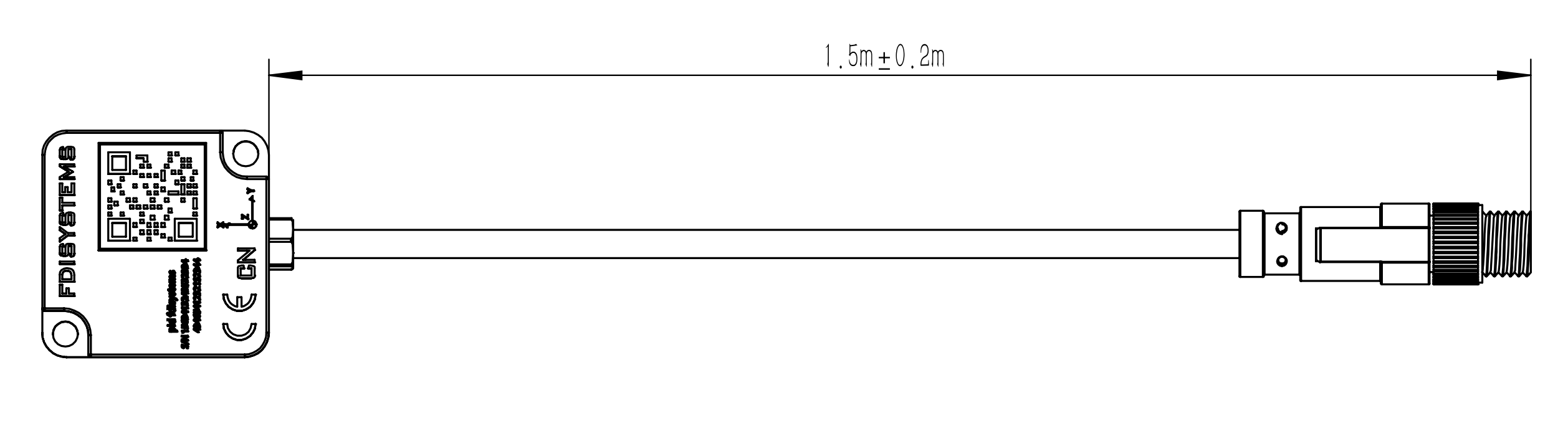
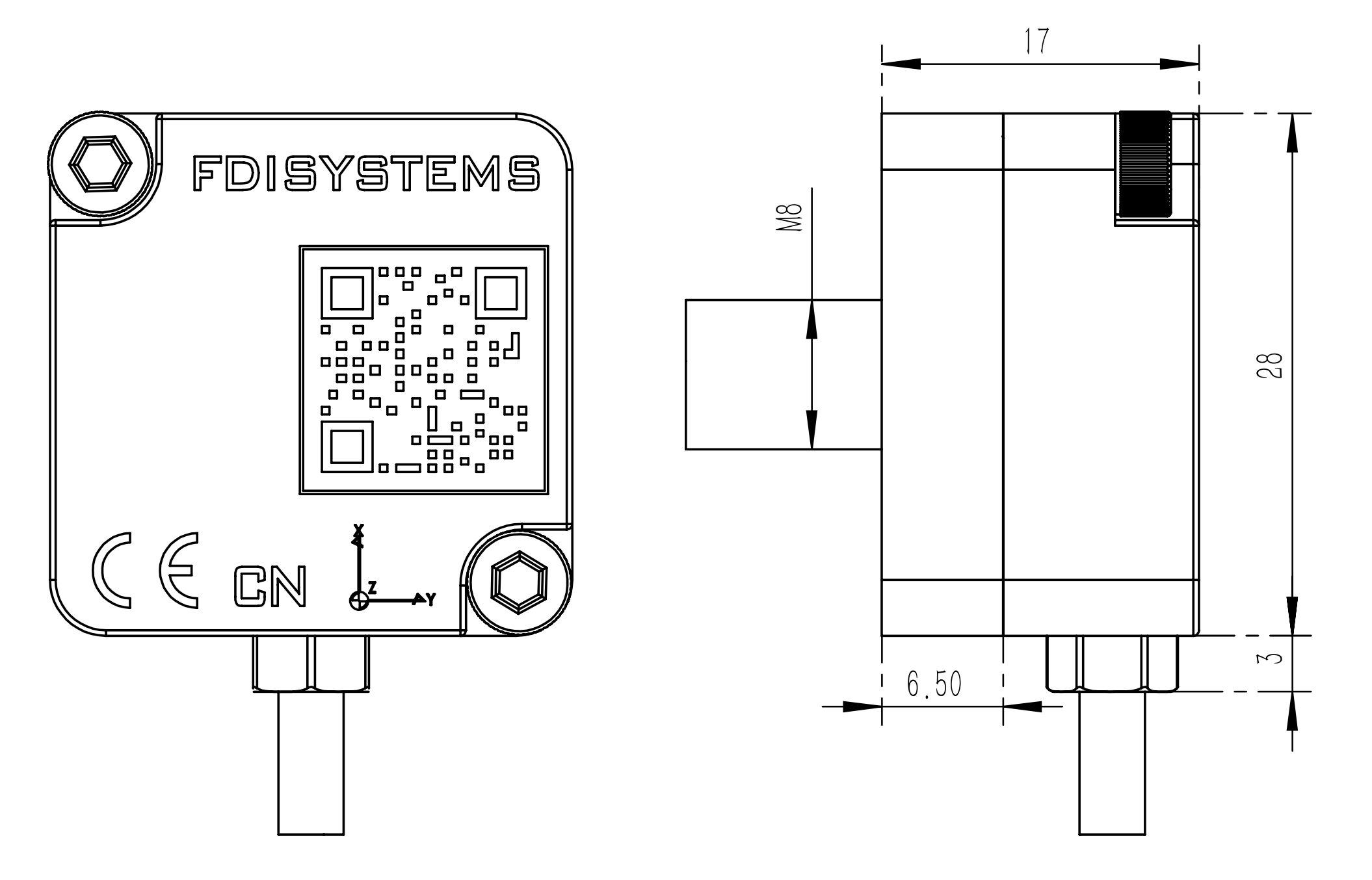
# DETA10/20/30pw 防水版本尺寸图
# 管脚介绍
# V/A/N 版本 plcc20
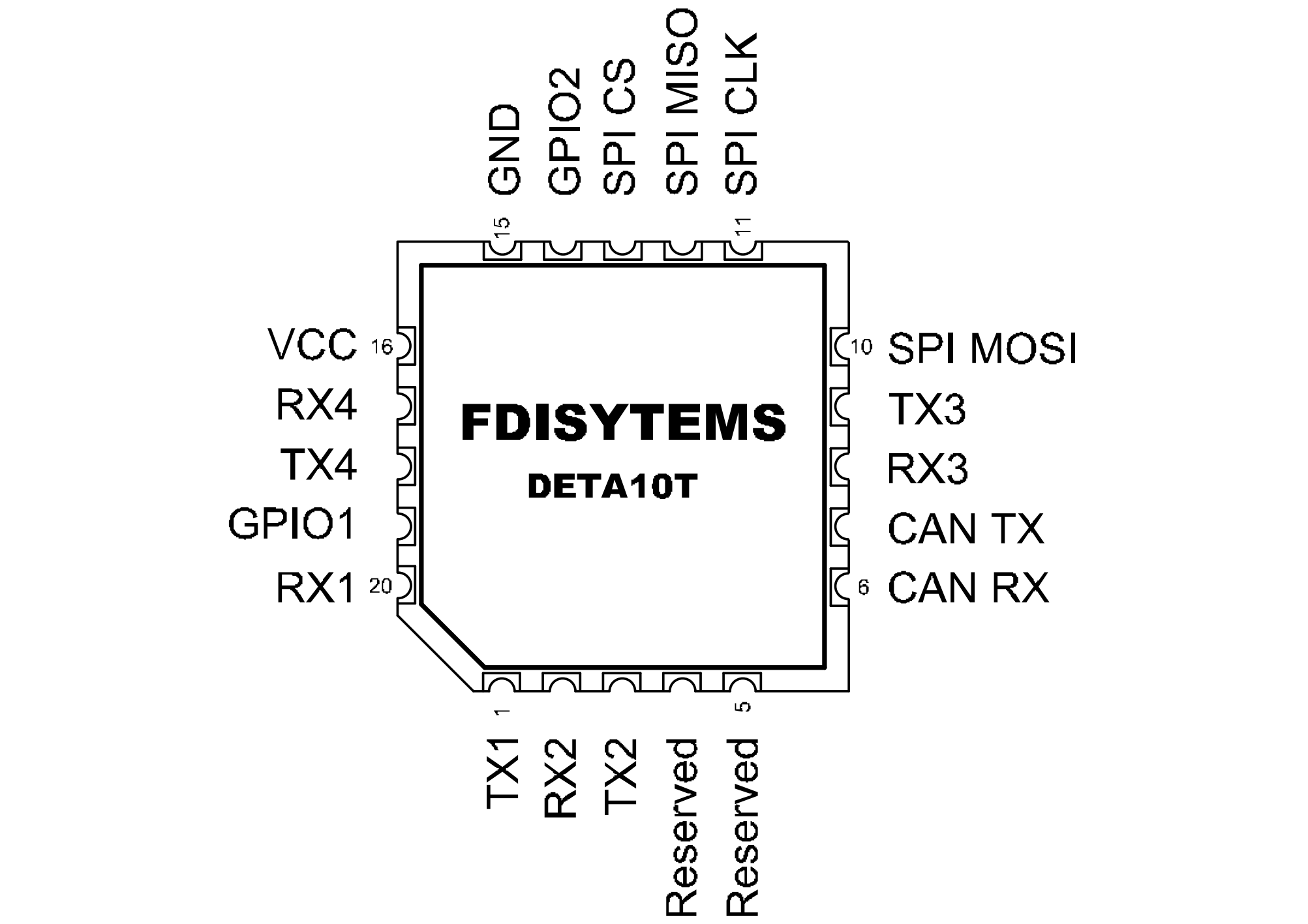
| 管脚号 | I/O | 名称 | 描述 |
|---|---|---|---|
| 1 | O | TX1 | UART1发送,TTL电平,默认921600bps |
| 2 | I | RX2 | UART2接收,TTL电平 |
| 3 | O | TX2 | UART2发送,TTL电平 |
| 4,5 | / | Reserved | 保留无需连接 |
| 6 | I | CAN RX | CAN 总线接收 |
| 7 | O | CAN TX | CAN 总线发送 |
| 8 | I | RX3 | UART3 接收,TTL电平,外部设备数据 |
| 9 | O | TX3 | UART3 发送,TTL电平,外部设备数据 |
| 10 | I | SPI MOSI | SPI 总线输入,主机模式/从机模式待开放 |
| 11 | I | SPI SCK | SPI 时钟,主机模式/从机模式待开放 |
| 12 | O | SPI MISO | SPI 总线输出,主机模式/从机模式待开放 |
| 13 | I | SPI CS | SPI 使能,主机模式/从机模式待开放 |
| 14 | IO | GPIO2 | 可编程通用输入输出 PPS/IO |
| 15 | / | GND | 电源地 |
| 16 | / | VCC | 3.3v直流电源 |
| 17 | I | RX4 | UART4接收,TTL电平,默认921600bps |
| 18 | O | TX4 | UART4发送,TTL电平,默认921600bps |
| 19 | IO | GPIO1 | 可编程通用输入输出 PPS/IO |
| 20 | I | RX1 | UART1接收,TTL电平,默认921600bps |
# V/A/N 版本 plcc20 evb
| 管脚号 | I/O | 名称 | 描述 |
|---|---|---|---|
| 1 | O | TX1 | UART1发送,TTL电平,默认921600bps |
| 2 | I | RX2 | UART2接收,TTL电平,暂时不用 |
| 3 | O | TX2 | UART2发送,TTL电平,暂时不用 |
| 4,5 | / | Reserved | 保留无需连接 |
| 6 | I | CAN RX | CAN 总线接收 |
| 7 | O | CAN TX | CAN 总线发送 |
| 8 | I | RX3 | UART3 接收,TTL电平,外部设备数据 |
| 9 | O | TX3 | UART3 发送,TTL电平,外部设备数据 |
| 10 | I | SPI MOSI | SPI 总线输入,主机模式/从机模式待开放 |
| 11 | I | SPI SCK | SPI 时钟,主机模式/从机模式待开放 |
| 12 | O | SPI MISO | SPI 总线输出,主机模式/从机模式待开放 |
| 13 | I | SPI CS | SPI 使能,主机模式/从机模式待开放 |
| 14 | IO | GPIO2 | 可编程通用输入输出 PPS/IO |
| 15 | / | GND | 电源地 |
| 16 | / | VCC | 3.3v直流电源 |
| 17 | I | RX4 | UART4接收,TTL电平,默认921600bps |
| 18 | O | TX4 | UART4发送,TTL电平,默认921600bps |
| 19 | IO | GPIO1 | 可编程通用输入输出 PPS/IO |
| 20 | I | RX1 | UART1接收,TTL电平,默认921600bps |
# V/A/N -p版本 box
| 管脚号 | I/O | 名称 | 描述 |
|---|---|---|---|
| 1 | / | VDD | 3.6-5.5v直流电源 |
| 2 | / | VDD | 3.6-5.5v直流电源 |
| 3 | / | GND | 电源地 |
| 4 | / | GND | 电源地 |
| 5 | O | TX1 | COM1发送,TTL电平,默认921600bps |
| 6 | I | RX1 | COM1接收,TTL电平,默认921600bps |
| 7 | I/O | GPIO1 | |
| 8 | I/O | CAN H | CAN 总线接收 |
| 9 | O | TX2 | COM2发送,TTL电平,默认921600bps |
| 10 | I/O | CAN L | CAN 总线接收 |
| 11 | I | RX2 | COM2接收,TTL电平,默认921600bps |
| 12 | I/O | GPIO2 | |
| 13 | / | Reserved | 保留无需连接 |
| 14 | O | TX3 | UART3 发送 ,TTL电平,外部设备数据 |
| 15 | / | Reserved | 保留无需连接 |
| 16 | I | RX3 | UART3 接收,TTL电平,外部设备数据 |
表 : deta10-p接口定义
# V/A/N -p版本 box Evb 开发板
| 管脚号 | I/O | 名称 | 描述 |
|---|---|---|---|
| 1 | / | VDD | 3.6-5.5v直流电源 |
| 2 | / | VDD | 3.6-5.5v直流电源 |
| 3 | / | GND | 电源地 |
| 4 | / | GND | 电源地 |
| 5 | O | TX1 | COM1发送,TTL电平,默认921600bps |
| 6 | I | RX1 | COM1接收,TTL电平,默认921600bps |
| 7 | I/O | GPIO1 | |
| 8 | I/O | CAN H | CAN 总线接收 |
| 9 | O | TX2 | COM2发送,TTL电平,默认921600bps |
| 10 | I/O | CAN L | CAN 总线接收 |
| 11 | I | RX2 | COM2接收,TTL电平,默认921600bps |
| 12 | I/O | GPIO2 | |
| 13 | / | Reserved | 保留无需连接 |
| 14 | O | TX3 | UART3 发送 ,TTL电平,外部设备数据 |
| 15 | / | Reserved | 保留无需连接 |
| 16 | I | RX3 | UART3 接收,TTL电平,外部设备数据 |
表 : deta10-p接口定义
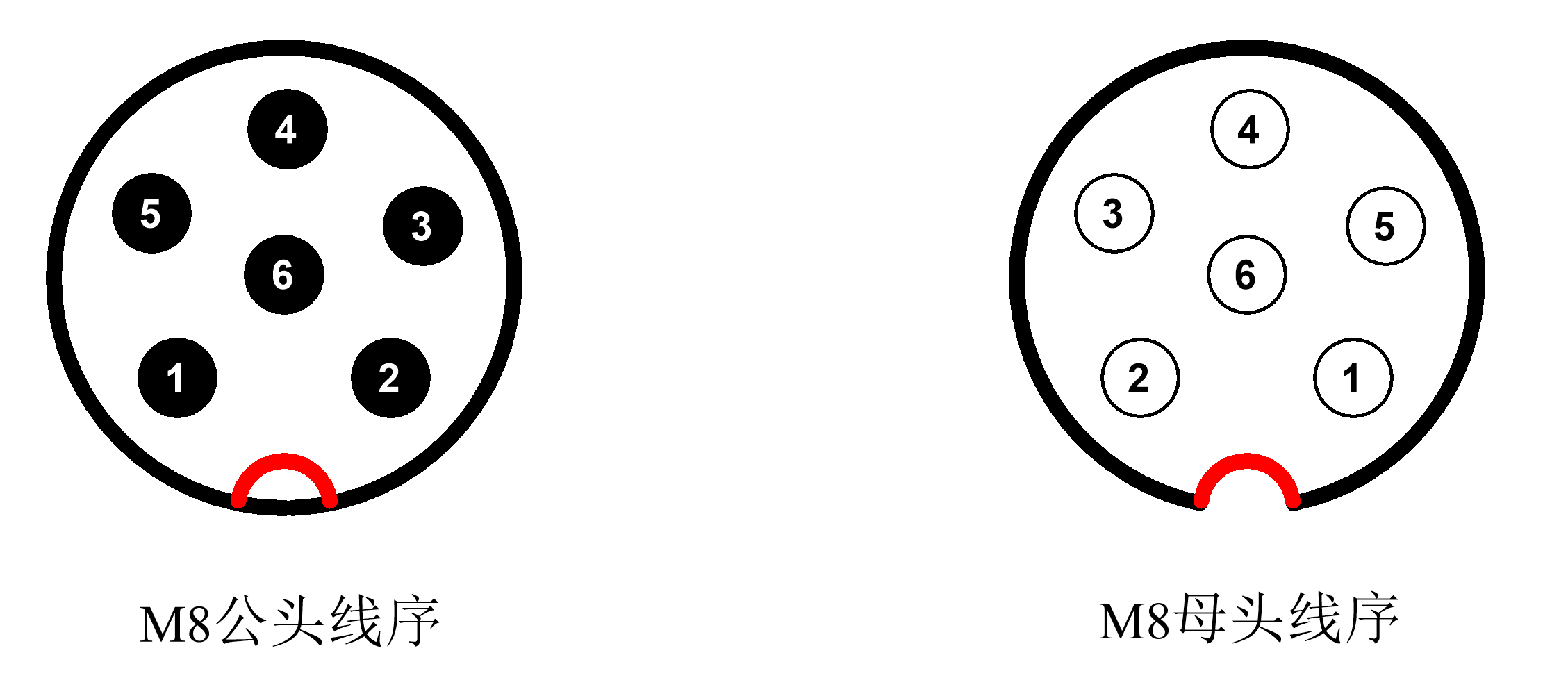
# V/A/N -pw版本 M8航插屏蔽线防水
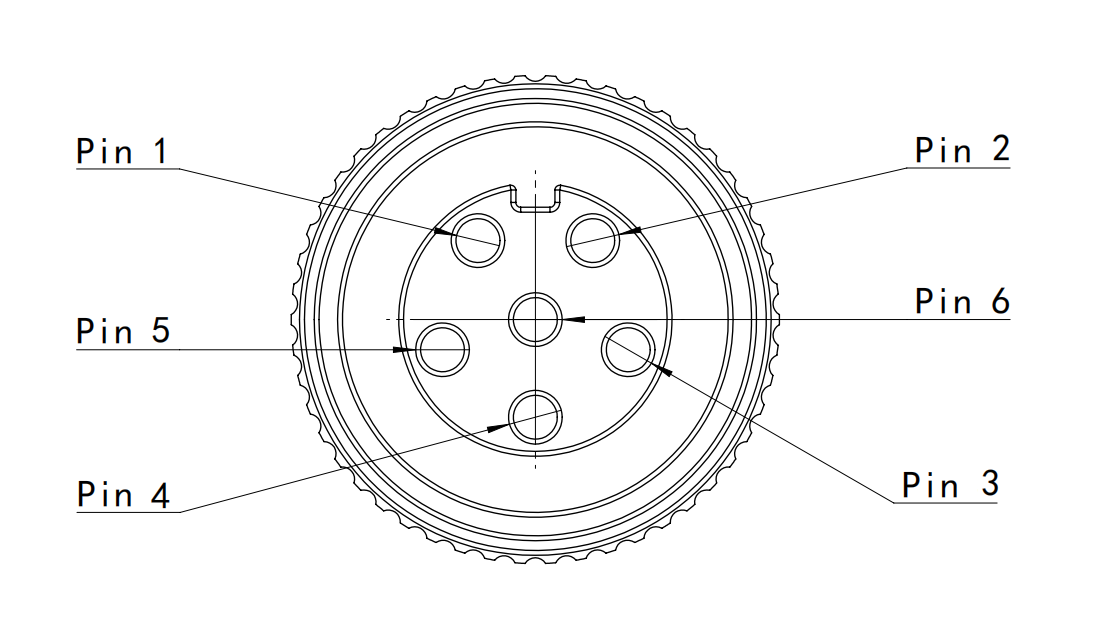
| 管脚号 | 颜色 | I/O | 名称 | 描述 |
|---|---|---|---|---|
| 1 | 红色 | I | VCC | 5.5-28v直流电源 |
| 2 | 绿色 | O | TX1 | UART1发送,TTL电平,默认921600bps |
| 3 | 黄色 | I | RX1 | UART1接收,TTL电平,默认921600bps |
| 4 | 蓝色 | O | CANH | CAN 总线高 |
| 5 | 白色 | O | CANL | CAN 总线低 |
| 6 | 黑色 | I | GND | 电源地 |
表 : deta10-pw接口定义
IMU模块端M8公头和配对的母头线序如下:
# V/A/N -pw版本 GH1.25排线版本

# 电路设计
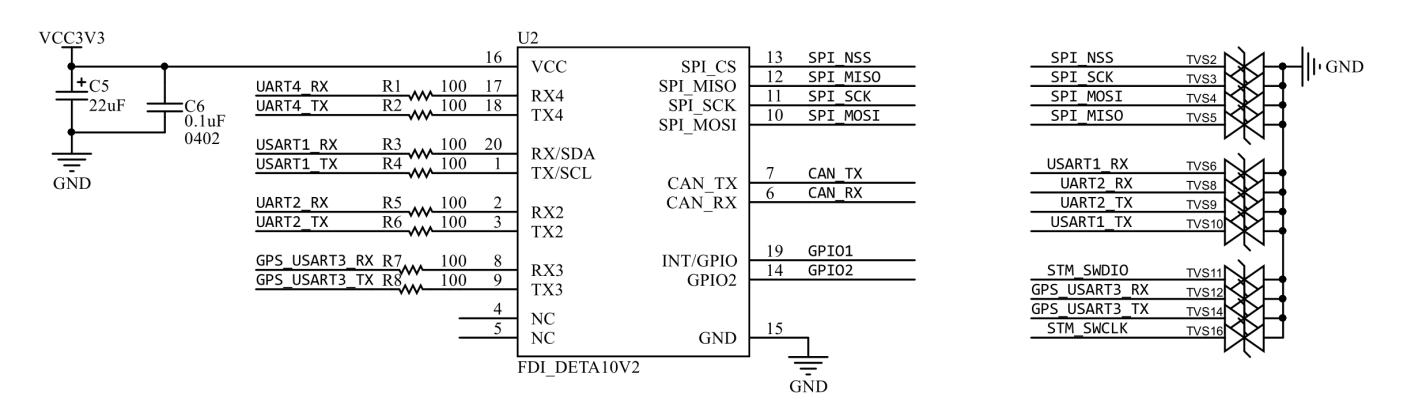
# DETA10的最小系统
# GPIO 和CAN 接口电路

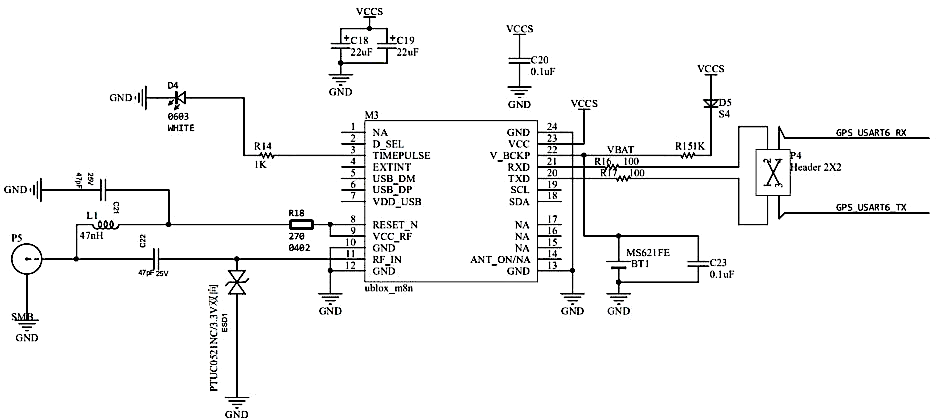
# GNSS应用电路
# Layout指导
参考PcbLayout 模组上有磁力计传感器,请远离大功率,强磁干扰源。MEMS器件精度会受到温度剧烈变化影响,请远离大发热源。
# 电气性能和可靠性
| 绝对最大值 | |||
|---|---|---|---|
| 参数 | 最小 | 最大 | 单位 |
| plcc20/PIN 1-20 | -0.3 | 3.6 | V |
| -p版本 box vcc | 3.6 | 5.5 | V |
| -p版本 box ttl | -0.3 | 3.6 | V |
| -pw版本 防水 vcc | 5 | 28 | V |
| -pw版本 防水 ttl | -0.3 | 3.6 | V |
# 静电防护
在模块应用中,由于人体静电、微电子间带电摩擦等产生的静电,通过各种途径放电给模块,可能会对模块造成一定的损坏,因此ESD 防护应该受到重视。在研发、生产组装和测试等过程中,尤其在产品设计中,均应采取ESD 防护措施。例如,在电路设计的接口处以及易受静电放电损伤或影响的点,应增加防静电保护;生产中应佩戴防静电手套等。
# 存储和生产
DETA10芯片以24*10=240片盘装真空密封袋的形式出货。模块的存储需遵循如下条件:
1.环境温度低于 40 摄氏度,空气湿度小于 90% 的情况下,模块可在真空密封袋中存放 12 个月。
2.当真空密封袋打开后,若满足以下条件,模块可直接进行回流焊或其它高温流程:
模块存储空气湿度小于 10%。
模块环境温度低于 30 摄氏度,空气湿度小于 60%,工厂在 72 小时以内完成贴片。
3.若模块处于如下条件,需要在贴片前进行烘烤:
当环境温度为 23 摄氏度(允许上下 5 摄氏度的波动)时,湿度指示卡显示湿度大于 10%。
当真空密封袋打开后,模块环境温度低于 30 摄氏度,空气湿度小于 60%,但工厂未能在 72小时以内完成贴片。
当真空密封袋打开后,模块存储空气湿度大于 10%。
4.如果模块需要烘烤,请在 125 摄氏度下(允许上下 5 摄氏度的波动)烘烤 48 小时。
模块的包装无法承受高温烘烤。因此在模块烘烤之前,请移除模块包装。如果只需要短时间的烘烤,请参考IPC/JEDECJ-STD-033 规范。
# 生产焊接
用印刷刮板在网板上印刷锡膏,使锡膏通过网板开口漏印到 PCB 上,印刷刮板力度需调整合适。为保证模块印膏质量,模块焊盘部分对应的钢网厚度推荐为 0.18mm。详细信息请参考设计文档。
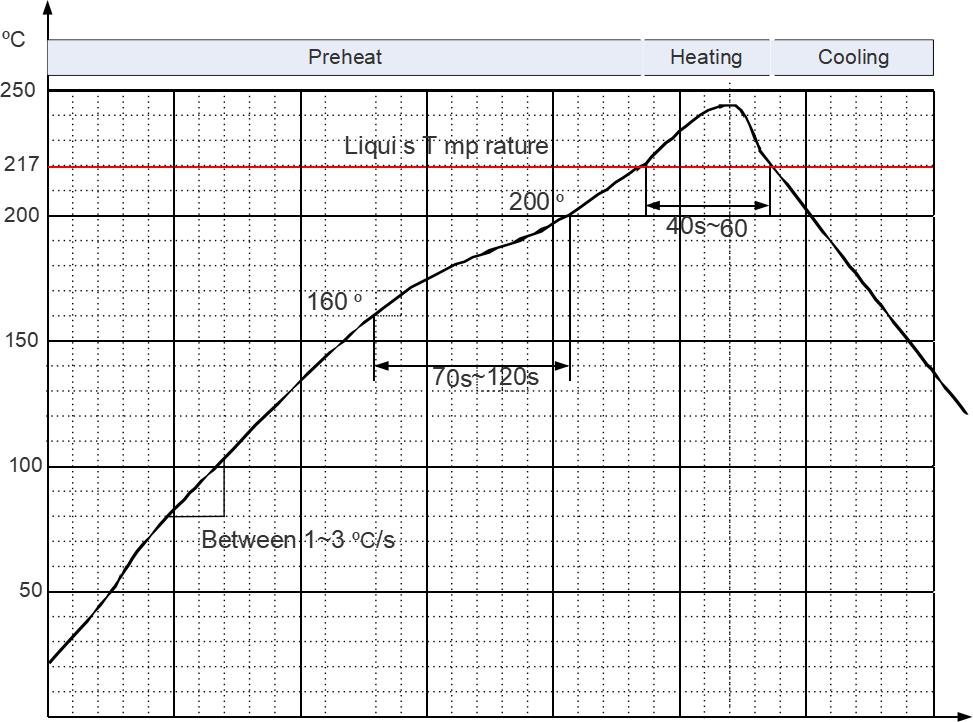
推荐的回流焊温度为 235~245ºC,最高不能超过 260ºC。为避免模块因反复受热而损坏,建议客户在完成 PCB 板第一面的回流焊之后再贴模块。保证模组朝上放置,推荐的炉温曲线图如下所示:
# 包装
DETA10系列 芯片模组按照PLCC20标准封装设计,以24*10=240片盘装真空密封袋的形式出货。模块防静电密封袋内防止有干燥剂和湿度测试卡。请注意朝上放置模块,并放置铝箔静电真空密封袋破损,导致密封失效.
# 传感器校准
FDIsystems 对 DETA10系列 在整个工作温度范围和三个传感器范围内的偏置、灵敏度、错位、跨轴灵敏度、非线性和陀螺仪线性加速度灵敏度进行了校准。请保证传感器在正常工作温度和冲击范围内使用,防止因外力造成模块的工作特性改变,导致校准参数失效。DETA10内置了多种在线校准算法,包含IMU 零偏刻度因子以及温度相关参数的自动自动化校准功能,以及磁力计的2D 和3D 软硬磁补偿,还提供了里程计、GNSS双天线安装校准等,具体请参考相关的教程。
在超过正常范围的冲击,过高或者过低的温度存储和使用设备都可以能让传感器校准失效甚至损坏。因此在使用中要尽量防止传感器高空跌落和热应力。

对DETA10 plcc 封装的模块不进行转台和温度校准, 原因是因为回流焊工艺经过高温会破坏传感器的校准参数。
对DETA 10/20/30P系列 box版本封装的模块进行转台和温度校准。
对DETA10/20/30 PW防水封装的模块进行转台和温度校准。
# Bootloader和SN
每一个 DETA10系列芯片模组拥有各自唯一的ID序列SN号,可以模组通过预置Bootloader识别ID 和完成固件的升级等操作,FDIsystems 保留了每一个模组校准后的校准参数文档和固件,如果需要的话,您可以联系我们获得 DETA10系列 模组的校准参数文档;固件一般是不提供的,仅在 DETA10系列 模组因操作不当或硬件损坏导致无法启动时,您可以返厂给我们,我们在修复模组后,通过其唯一的芯片ID序列找到对应的固件进行重新烧录。
# 资源下载
# DETA10 plcc20系列硬件设计资料
DETA10系列 集成设计参考 共有以下2种型号:
| 型号 | 外形 | STEP |
|---|---|---|
| DETA10系列plcc封装evb sch/pcb/lib | | 硬件设计参考下载 |
# DETA10/20/30P系列 box版本硬件设计资料
集成设计参考 共有以下2种型号:
| 型号 | 外形 | STEP |
|---|---|---|
| DETA10/20/30P系列fpc图纸 | 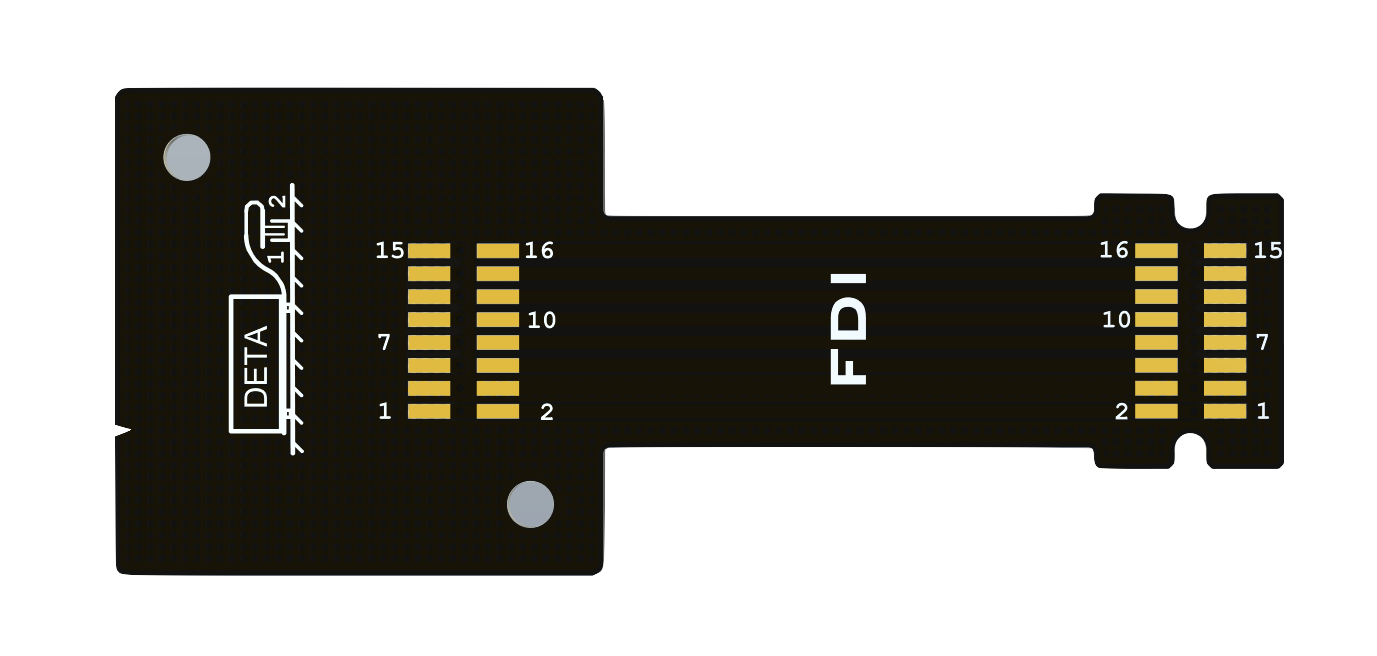 | fpc硬件设计参考下载 |
| DETA10/20/30P系列evb sch/pcb/lib |  | 载板硬件设计参考下载 |
# DETA10/20/30PW系列 防水版本电气
# DETA 3D STEP 模型
DETA 系列 Rugged STEP File DETA系列 共有以下4种型号:
| 型号 | 外形 | STEP |
|---|---|---|
| DETA10 PLCC | 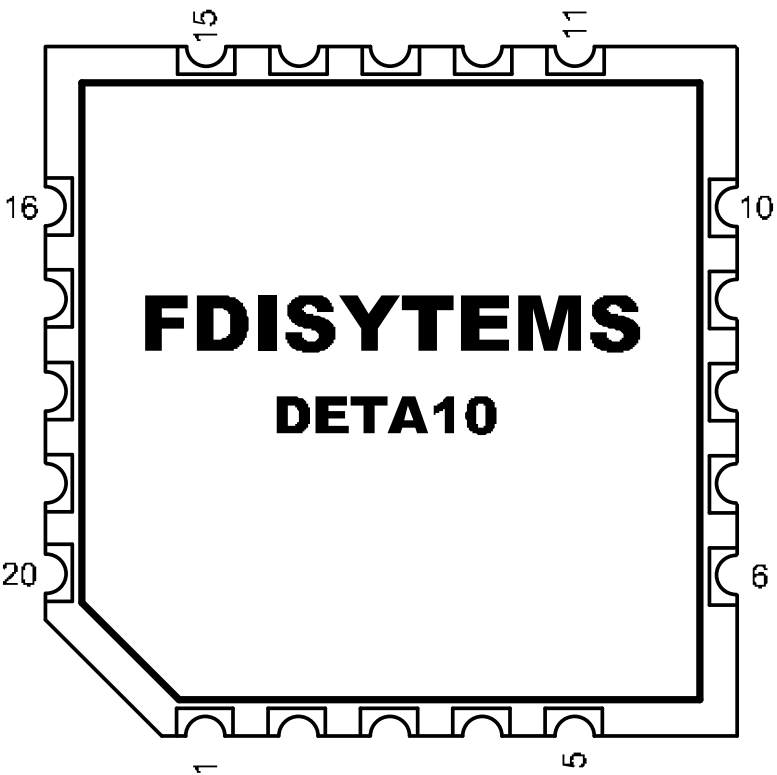 | DETA10 PLCC STEP File |
| DETA10/20/30 box 封装 | | DETA10/20/30 box封装 STEP File |
| DETA10/20/30 PW防水封装 | | DETA10/20/30 防水版本STEP File |