
# DETA20规格
# 导航规格
# DETA20导航性能
| NAVIGATION | DETA20 V | DETA20 A | DETA20 N |
| 俯仰/横滚 (静态) | 0.05 ° RMS | 0.05 ° RMS | 0.05 ° RMS |
| 俯仰/横滚 (动态)3 | 0.1 ° RMS | 0.1 ° RMS | 0.1° RMS |
| 相对航向 1(静态) | 2 ° /hr | 2 ° /hr | 2 ° /hr |
| 相对航向 1(动态) | 5 ° /hr | 5 ° /hr | 5 ° /hr |
| 绝对航向(磁辅助)2 | - | 0.5 ° RMS | 0.5° RMS |
| 水平位置3 | - | - | 1.5 m RMS |
| 速度精度 | - | - | ±0.05 m/s |
| 角度分辨率 | < 0.01 ° | < 0.01° | < 0.01° |
| 角度重复性 | < 0.1° | < 0.1 ° | < 0.1 ° |
| IMU数据输出频率 | 400 Hz | 400 Hz | 400 Hz |
| 导航数据输出频率 | 200 Hz | 200 Hz | 200 Hz |
表 : DETA20导航性能规格
# 传感器规格
| 参数 | 加速度计 | 陀螺仪 | 磁力计 |
| 量程 | ±16 g | ±2000 °/s | ±1000uT |
| 刻度因子误差 | 300ppm | 1,000 ppm | - |
| 零偏不稳定性 | 40ug | < 10 °/hr , 冗余航向陀螺 2 °/hr(deta92)*; | - |
| 线性度 | < 0.1 % FS | < 0.1 % FS | 0.1 % FS |
| 噪声密度 | 75µg/√Hz | 0.0028º/s /√Hz | 140 µGauss/√Hz |
| 带宽 | 500 Hz | 500 Hz | 400 Hz |
| 正交性误差 | ±0.05 ° | ±0.05 ° | ±0.1 ° |
表: 传感器规格
# 接口&电气
| 接口&电气 | 环境 | |||
| 主接口 | UART (TTL)*4, CAN *1(外接转换器) | 操作温度 | -40°C to +85°C | |
| 拓展接口 | GPIO*2:1PPS input/output 、Event | 震动 | 10 g RMS [20 - 2 kHz] MIL-STD-810G | |
| 输入电压 | PLCC20 :3.3v | A:180mW, N:220 mW | 冲击 | 20,000 g | |
| BOX:3.6-5.5v | A:180mW, N:220 mW | MTBF | 50,000 hours | ||
| 防水:5.5-28v | A:180mW |
表 : DETA20接口规格
# 结构规格
| Model | V | A | N |
| PLCC20 | DETA20-V | DETA20-A | DETA20-N |
| Size | Weight | 9.5 x 9.5 x 2.6 m | 1 g | 9.5 x 9.5 x 2.6 m | 1 g | 9.5 x 9.5 x 2.6 m | 1 g |
| BOX | DETA20-VP | DETA20-AP | DETA20-NP |
| Size | Weight | 21.2x21.2x8.5mm | 6g | 21.2x21.2x8.5mm | 6g | 21.2x21.2x8.5mm | 6g |
| PW防水 | DETA20-VPW | DETA20-APW | / |
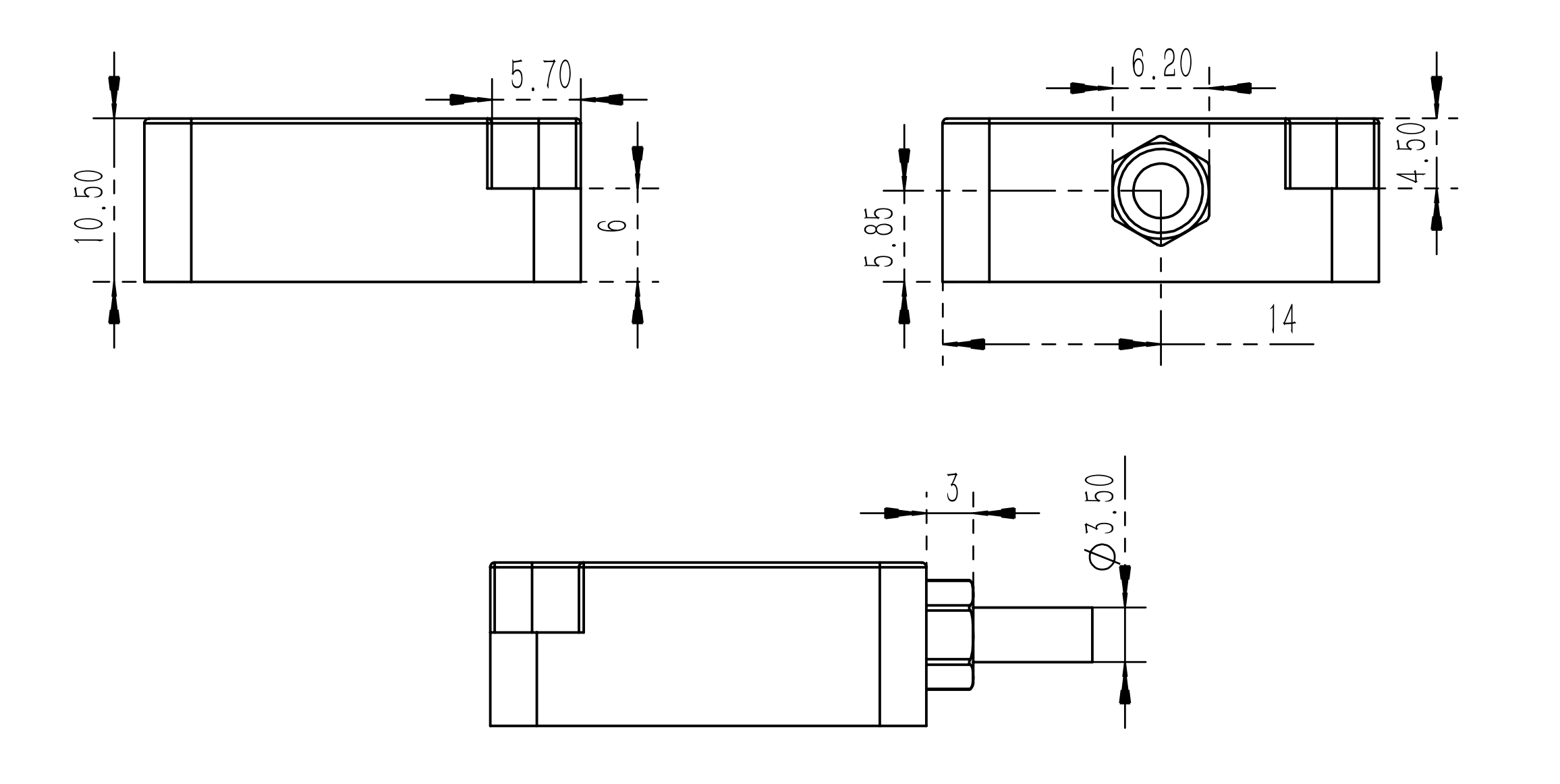
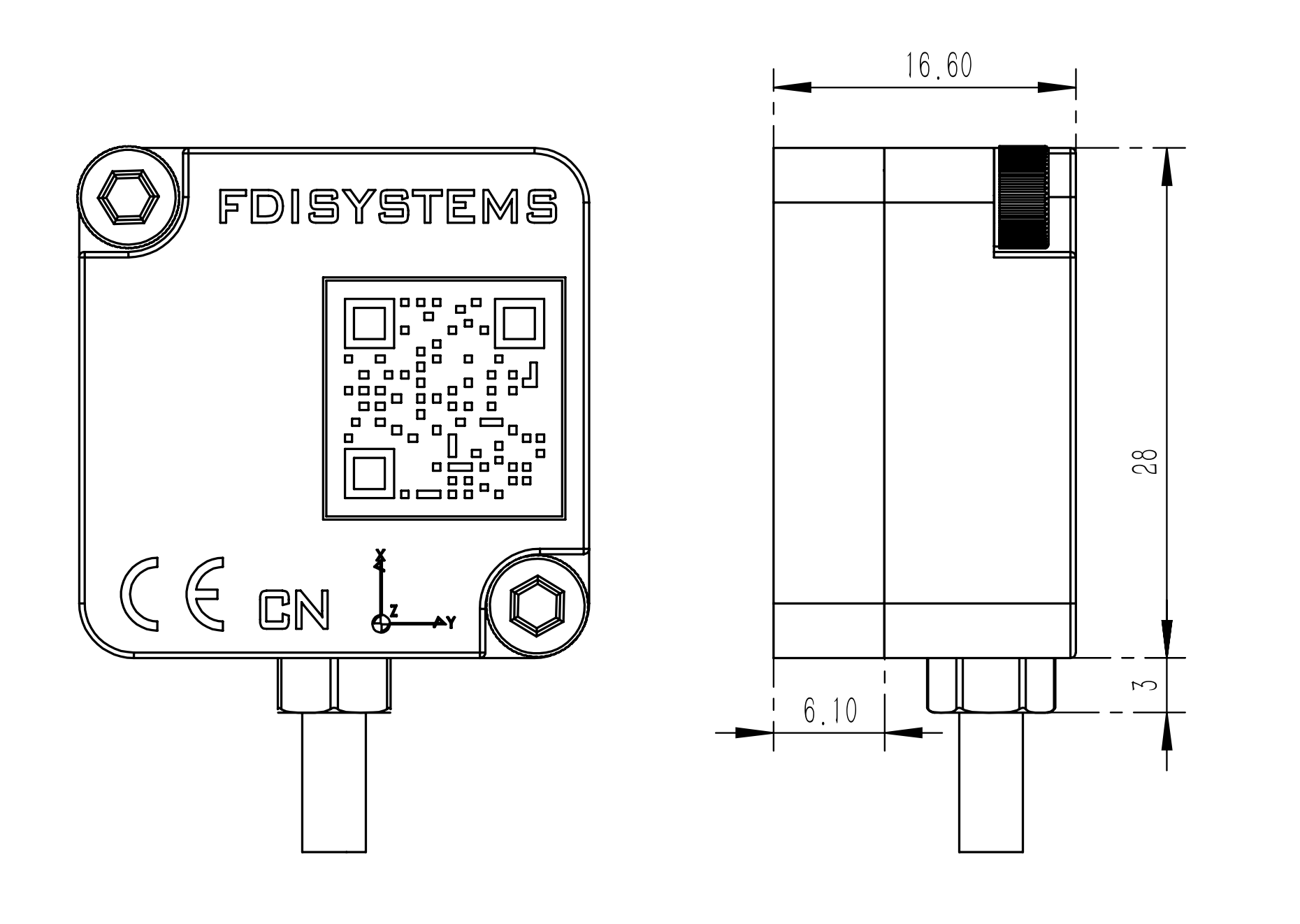
| Size | Weight | 28x28x10.5mm | 15g | 28x28x10.5mm | 15g | / |
表 : DETA20 结构规格
# 通讯规格
| 输入输出 | |
| 协议 | FDILink Binary, FDILink ASCII, NMEA |
| 拓展接口 | 欧拉角 (Yaw, Pitch, Roll); 四元数; 位置; 速度; 方向余弦矩阵; 加速度,角速度,磁场向量 |
| 融合引擎 | 自适应非线性Sigma-point 卡尔曼滤波器; 用户可配置辅助观测源 参数在线估计; 野值和异常检测隔离; 自适应滤波 |
| 外部辅 助 | GNSS, RTK,气压计,空速管, 里程计 |
| 指令配 置 | 支持串行指令配置:重启、校准、模式切换等 |
| 数据同 步 | Sync-In, Sync-Out I/O pins; GPS PPS, 30 ns RMS, 60 ns 99% |
表 : DETA20输入输出规格
# 结构图纸
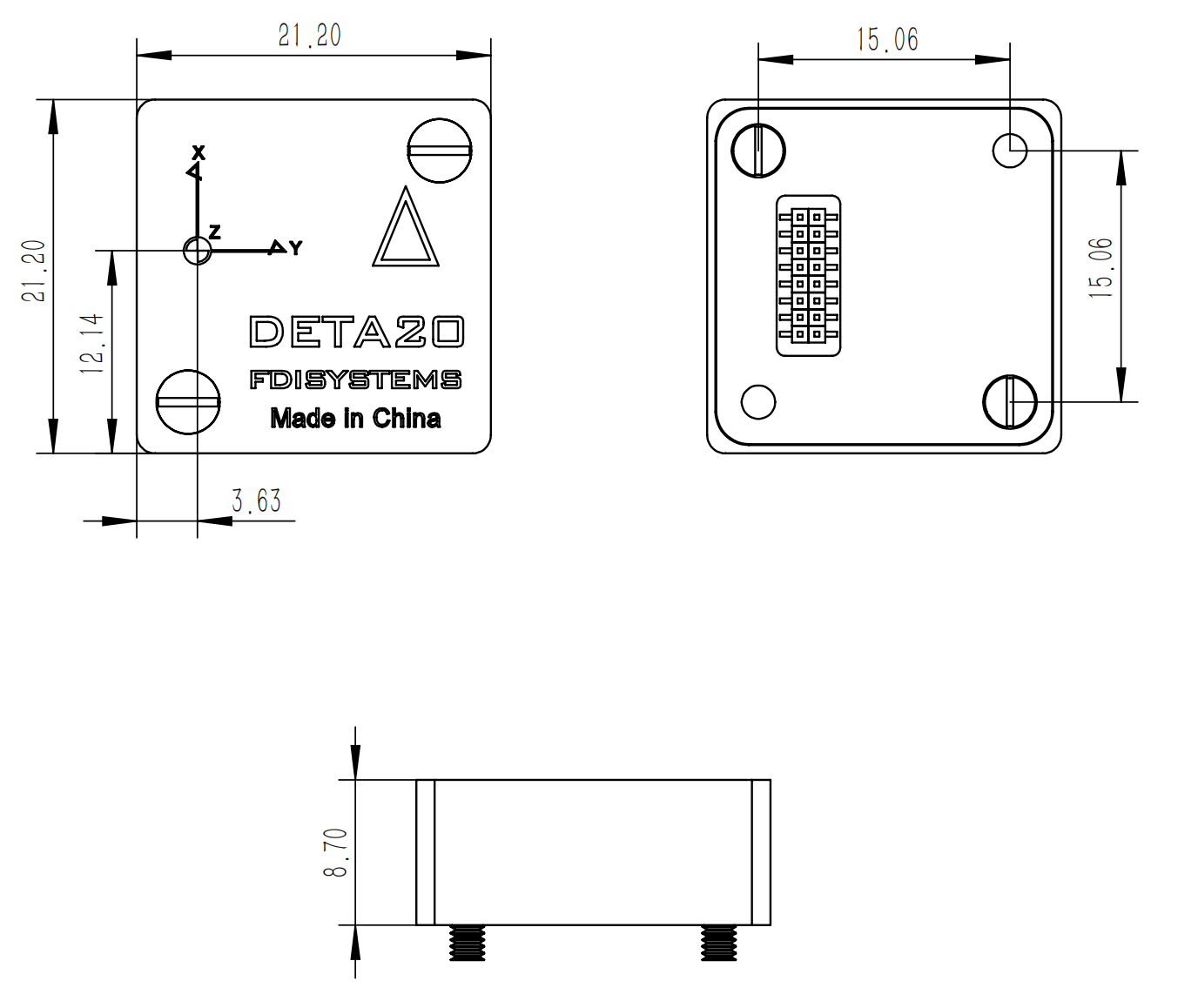
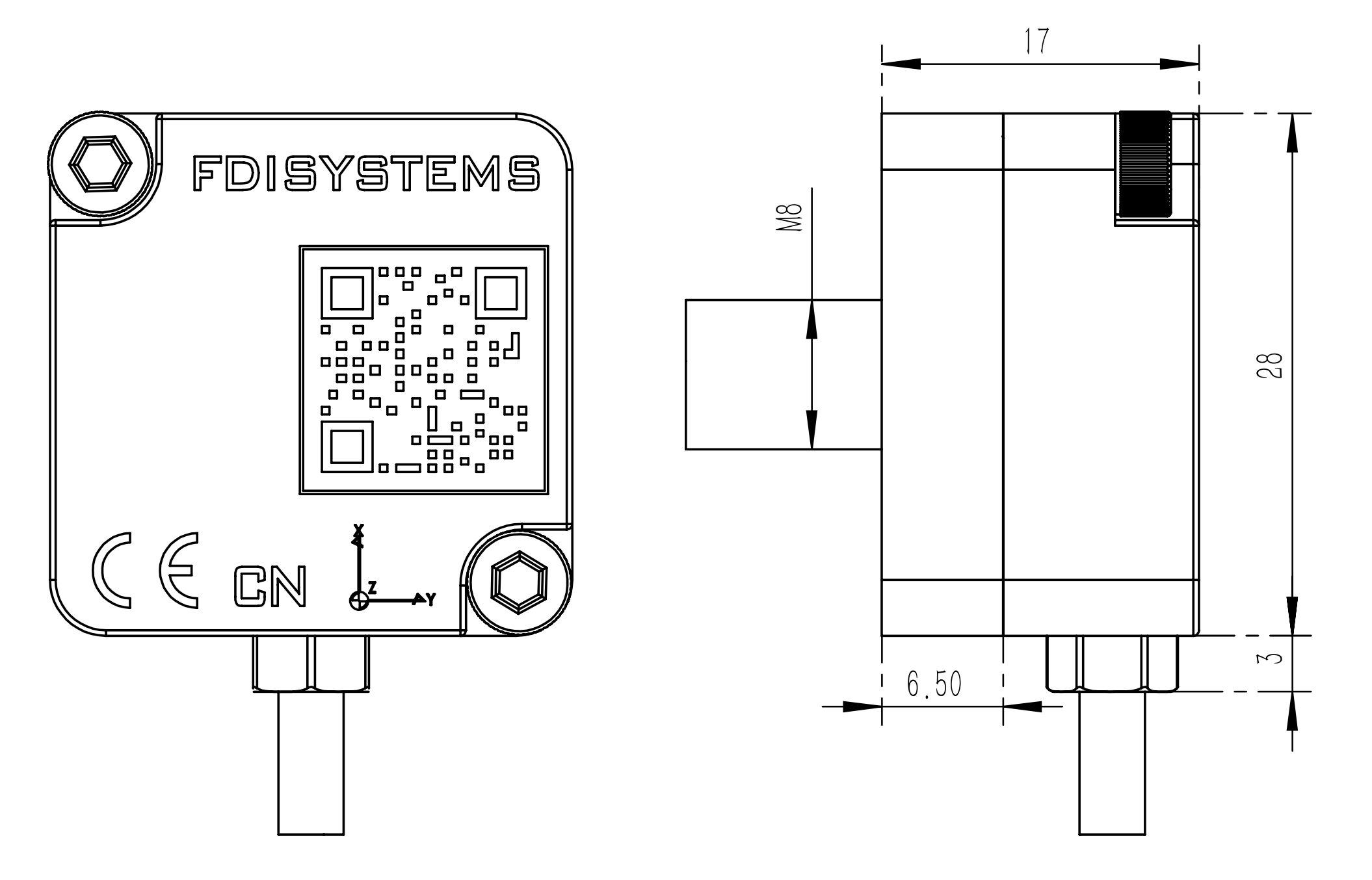
# DETA10/20/30/40 铝合金外壳封装尺寸图
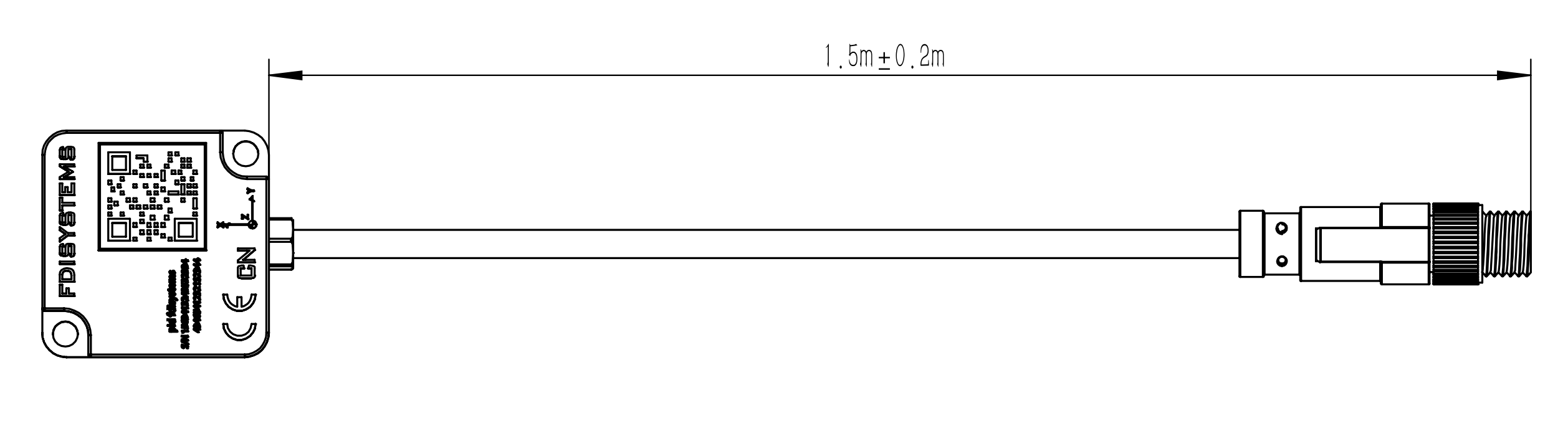
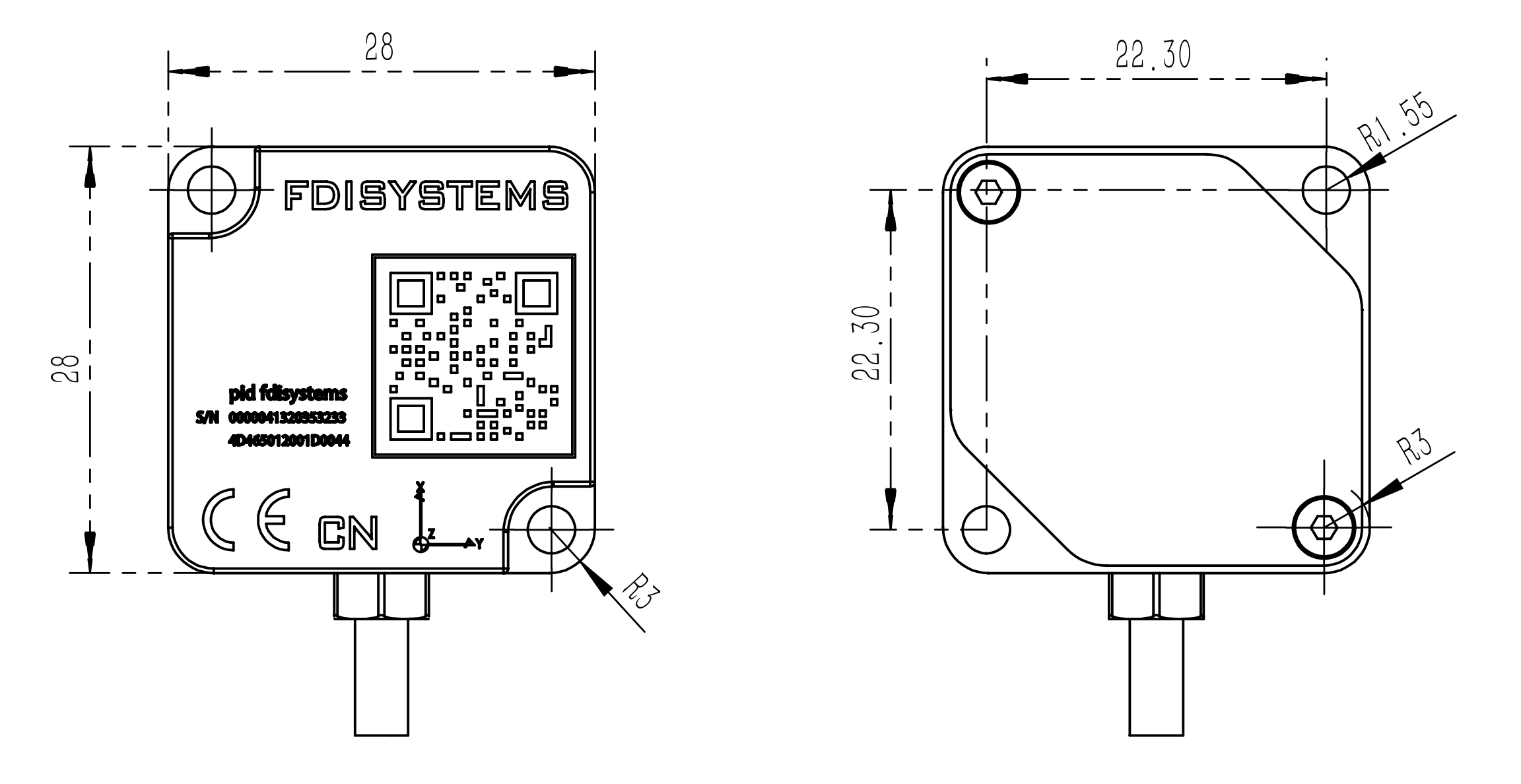
# DETA10/20/30pw 防水版本尺寸图
# 管脚介绍
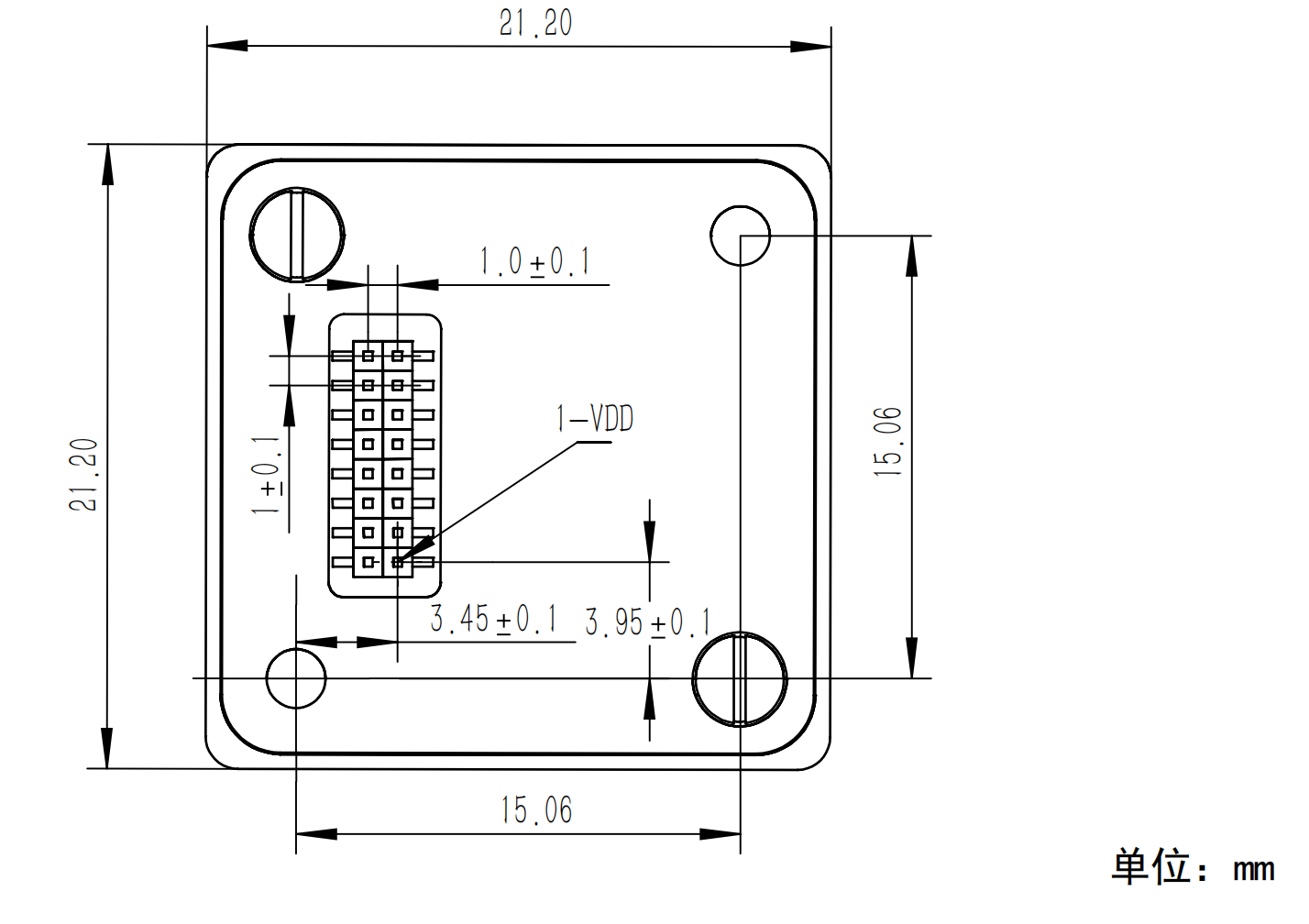
# V/A/N -p版本 box

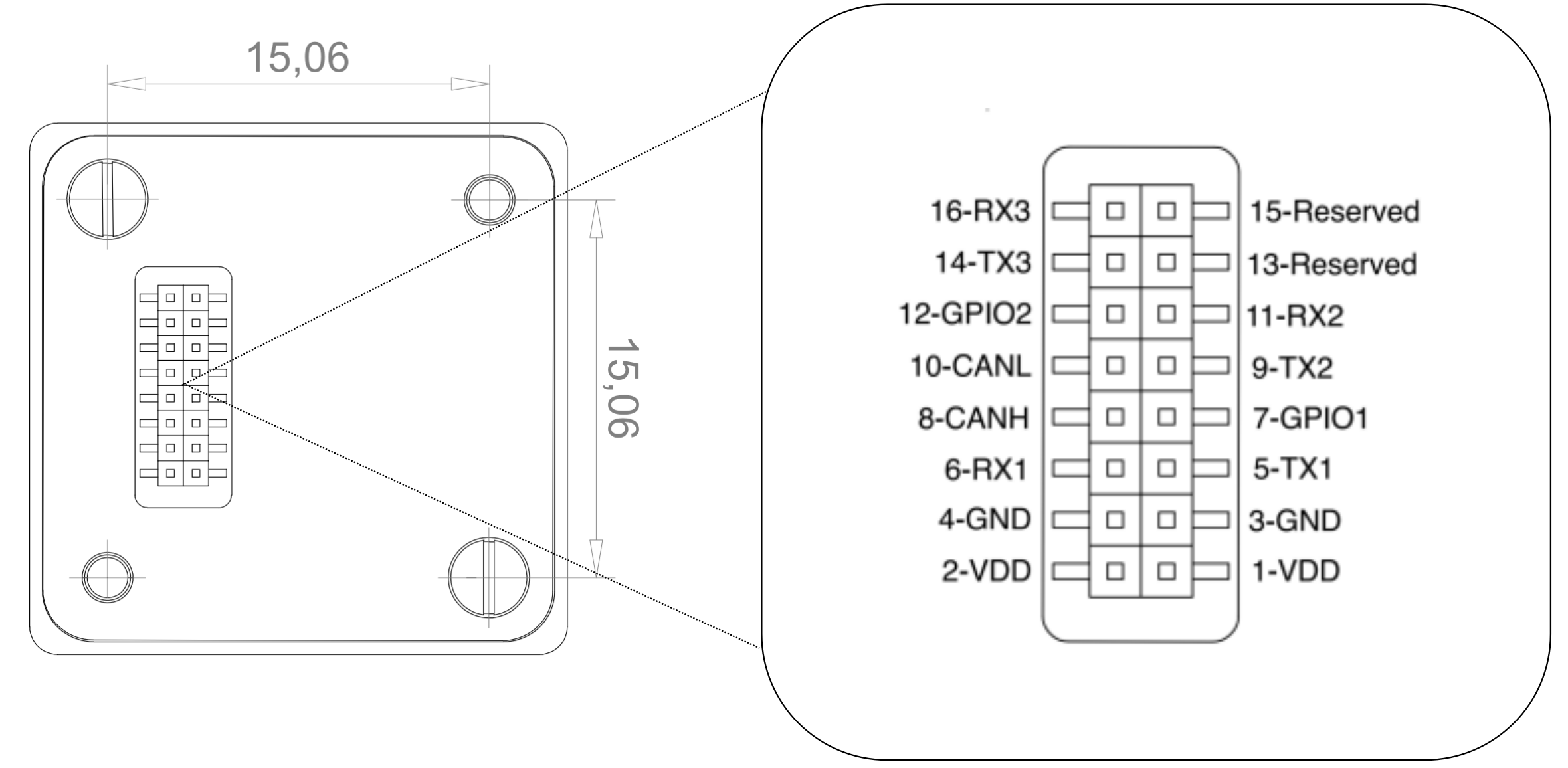
| 管脚号 | I/O | 名称 | 描述 |
|---|---|---|---|
| 1 | / | VDD | 3.6-5.5v直流电源 |
| 2 | / | VDD | 3.6-5.5v直流电源 |
| 3 | / | GND | 电源地 |
| 4 | / | GND | 电源地 |
| 5 | O | TX1 | COM1发送,TTL电平,默认921600bps |
| 6 | I | RX1 | COM1接收,TTL电平,默认921600bps |
| 7 | I/O | GPIO1 | |
| 8 | I/O | CAN H | CAN 总线接收 |
| 9 | O | TX2 | COM2发送,TTL电平,默认921600bps |
| 10 | I/O | CAN L | CAN 总线接收 |
| 11 | I | RX2 | COM2接收,TTL电平,默认921600bps |
| 12 | I/O | GPIO2 | |
| 13 | / | Reserved | 保留无需连接 |
| 14 | O | TX3 | UART3 发送 ,TTL电平,外部设备数据 |
| 15 | / | Reserved | 保留无需连接 |
| 16 | I | RX3 | UART3 接收,TTL电平,外部设备数据 |
表 : deta20-p接口定义
# V/A/N -p版本 box Evb 开发板
| 管脚号 | I/O | 名称 | 描述 |
|---|---|---|---|
| 1 | / | VDD | 3.6-5.5v直流电源 |
| 2 | / | VDD | 3.6-5.5v直流电源 |
| 3 | / | GND | 电源地 |
| 4 | / | GND | 电源地 |
| 5 | O | TX1 | COM1发送,TTL电平,默认921600bps |
| 6 | I | RX1 | COM1接收,TTL电平,默认921600bps |
| 7 | I/O | GPIO1 | |
| 8 | I/O | CAN H | CAN 总线接收 |
| 9 | O | TX2 | COM2发送,TTL电平,默认921600bps |
| 10 | I/O | CAN L | CAN 总线接收 |
| 11 | I | RX2 | COM2接收,TTL电平,默认921600bps |
| 12 | I/O | GPIO2 | |
| 13 | / | Reserved | 保留无需连接 |
| 14 | O | TX3 | UART3 发送 ,TTL电平,外部设备数据 |
| 15 | / | Reserved | 保留无需连接 |
| 16 | I | RX3 | UART3 接收,TTL电平,外部设备数据 |
表 : deta20-p接口定义
# V/A/N -pw版本 防水
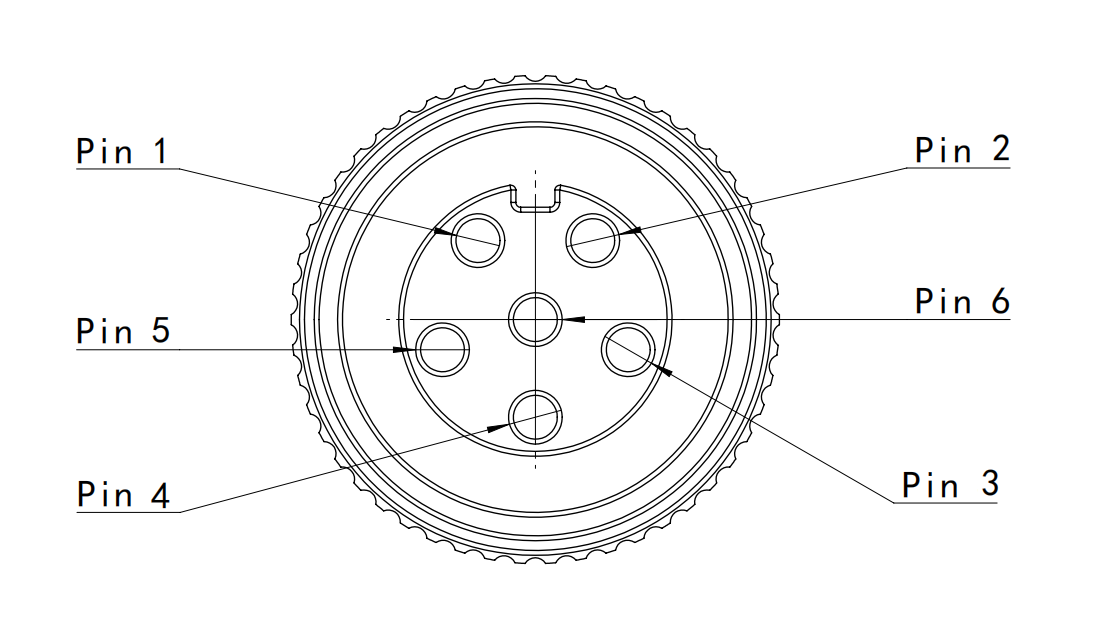
| 管脚号 | 颜色 | I/O | 名称 | 描述 |
|---|---|---|---|---|
| 1 | 红色 | I | VCC | 5.5-28v直流电源 |
| 2 | 绿色 | O | TX1 | UART1发送,TTL电平,默认921600bps |
| 3 | 黄色 | I | RX1 | UART1接收,TTL电平,默认921600bps |
| 4 | 蓝色 | O | CANH | CAN 总线高 |
| 5 | 白色 | O | CANL | CAN 总线低 |
| 6 | 黑色 | I | GND | 电源地 |
表 : deta20-pw接口定义
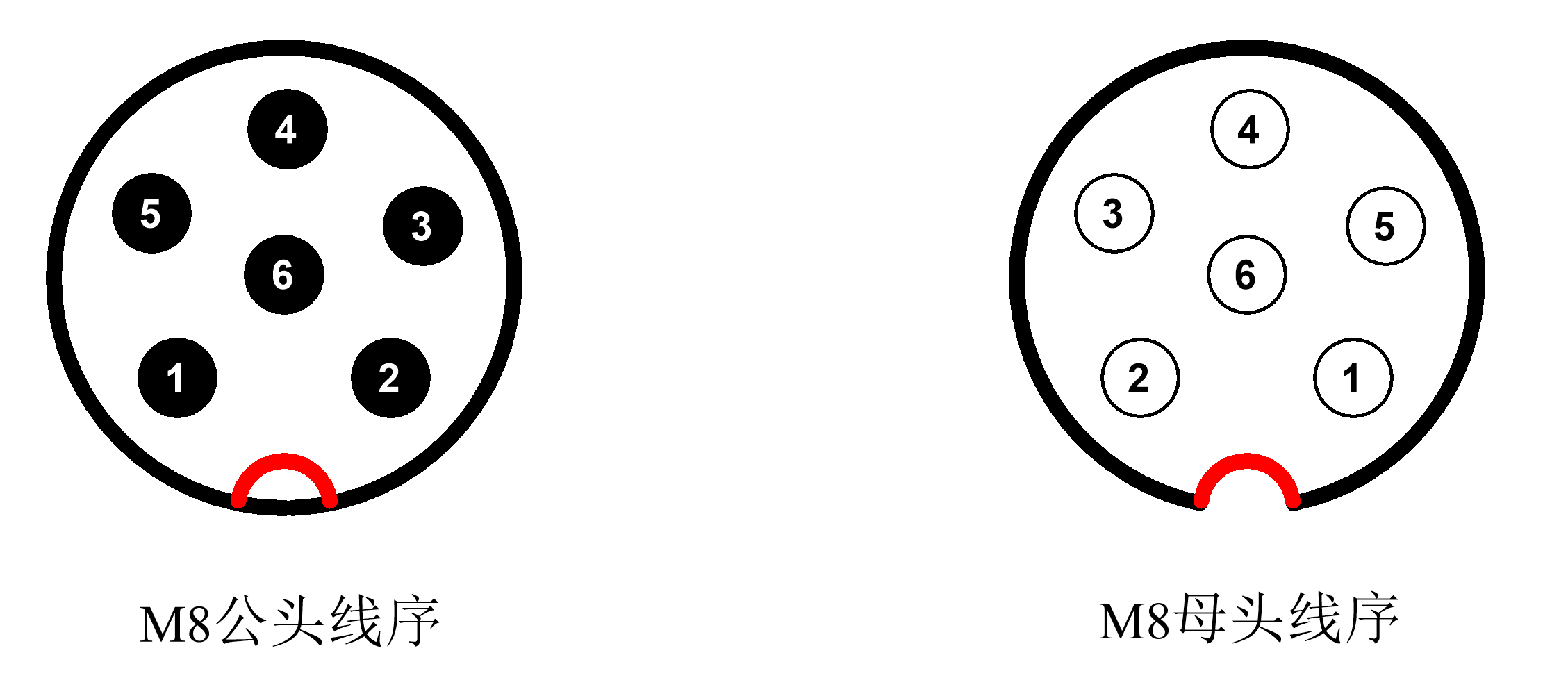
IMU模块端M8公头和配对的母头线序如下:
# V/A/N -pw版本 GH1.25排线版本

# 电路设计
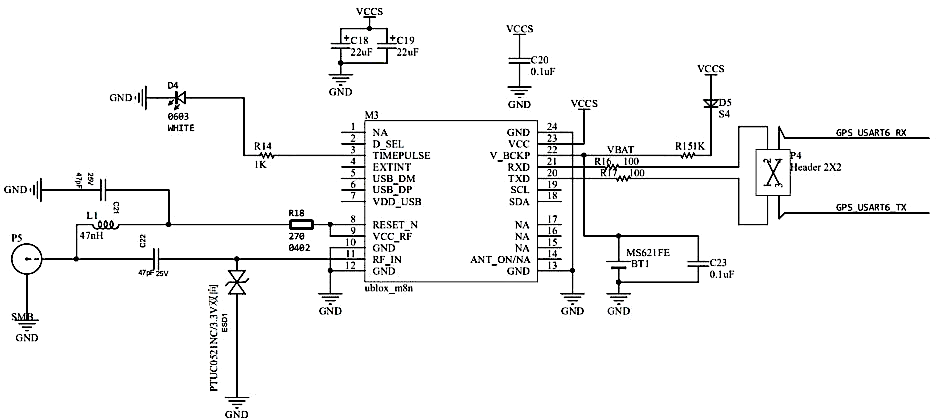
# GNSS应用电路
# 电气性能和可靠性
| 绝对最大值 | |||
|---|---|---|---|
| 参数 | 最小 | 最大 | 单位 |
| -p版本 box vcc | 3.6 | 5.5 | V |
| -p版本 box ttl | -0.3 | 3.6 | V |
| -pw版本 防水 vcc | 5 | 28 | V |
| -pw版本 防水 ttl | -0.3 | 3.6 | V |
# 静电防护
在模块应用中,由于人体静电、微电子间带电摩擦等产生的静电,通过各种途径放电给模块,可能会对模块造成一定的损坏,因此ESD 防护应该受到重视。在研发、生产组装和测试等过程中,尤其在产品设计中,均应采取ESD 防护措施。例如,在电路设计的接口处以及易受静电放电损伤或影响的点,应增加防静电保护;生产中应佩戴防静电手套等。
# 存储和生产
DETA20芯片以盘装真空密封袋的形式出货。模块的存储需遵循如下条件:
1.环境温度低于 40 摄氏度,空气湿度小于 90% 的情况下,模块可在真空密封袋中存放 12 个月。
2.当真空密封袋打开后,若满足以下条件,模块可直接进行回流焊或其它高温流程:
模块存储空气湿度小于 10%。
模块环境温度低于 30 摄氏度,空气湿度小于 60%,工厂在 72 小时以内完成贴片。
3.若模块处于如下条件,需要在贴片前进行烘烤:
当环境温度为 23 摄氏度(允许上下 5 摄氏度的波动)时,湿度指示卡显示湿度大于 10%。
当真空密封袋打开后,模块环境温度低于 30 摄氏度,空气湿度小于 60%,但工厂未能在 72小时以内完成贴片。
当真空密封袋打开后,模块存储空气湿度大于 10%。
4.如果模块需要烘烤,请在 125 摄氏度下(允许上下 5 摄氏度的波动)烘烤 48 小时。
模块的包装无法承受高温烘烤。因此在模块烘烤之前,请移除模块包装。如果只需要短时间的烘烤,请参考IPC/JEDECJ-STD-033 规范。
# 生产焊接
用印刷刮板在网板上印刷锡膏,使锡膏通过网板开口漏印到 PCB 上,印刷刮板力度需调整合适。为保证模块印膏质量,模块焊盘部分对应的钢网厚度推荐为 0.18mm。详细信息请参考设计文档。
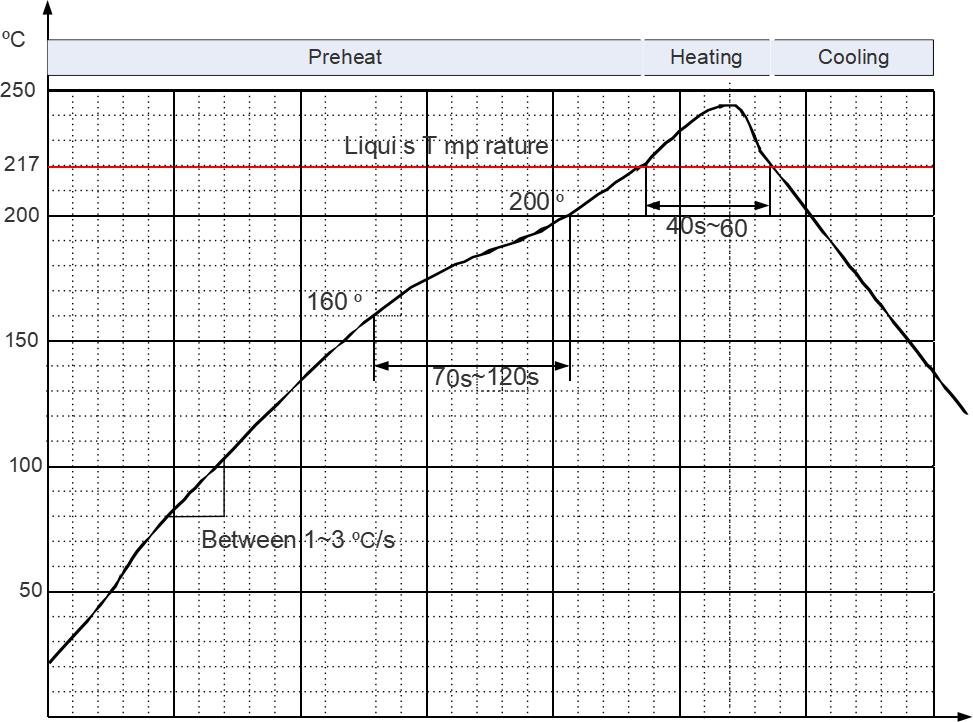
推荐的回流焊温度为 235~245ºC,最高不能超过 260ºC。为避免模块因反复受热而损坏,建议客户在完成 PCB 板第一面的回流焊之后再贴模块。保证模组朝上放置,推荐的炉温曲线图如下所示:
# 包装
# 传感器校准
FDIsystems 对 DETA系列 在整个工作温度范围和三个传感器范围内的偏置、灵敏度、错位、跨轴灵敏度、非线性和陀螺仪线性加速度灵敏度进行了校准。请保证传感器在正常工作温度和冲击范围内使用,防止因外力造成模块的工作特性改变,导致校准参数失效。DETA10内置了多种在线校准算法,包含IMU 零偏刻度因子以及温度相关参数的自动自动化校准功能,以及磁力计的2D 和3D 软硬磁补偿,还提供了里程计、GNSS双天线安装校准等,具体请参考相关的教程。
# Bootloader和SN
每一个 DETA20系列芯片模组拥有各自唯一的ID序列SN号,可以模组通过预置Bootloader识别ID 和完成固件的升级等操作,FDIsystems 保留了每一个模组校准后的校准参数文档和固件,如果需要的话,您可以联系我们获得DETA系列 模组的校准参数文档;固件一般是不提供的,仅在DETA系列 模组因操作不当或硬件损坏导致无法启动时,您可以返厂给我们,我们在修复模组后,通过其唯一的芯片ID序列找到对应的固件进行重新烧录。
# 资源下载
# DETA10/20/30P系列 box版本硬件设计资料
集成设计参考 共有以下2种型号:
| 型号 | 外形 | STEP |
|---|---|---|
| DETA10/20/30P系列fpc图纸 | 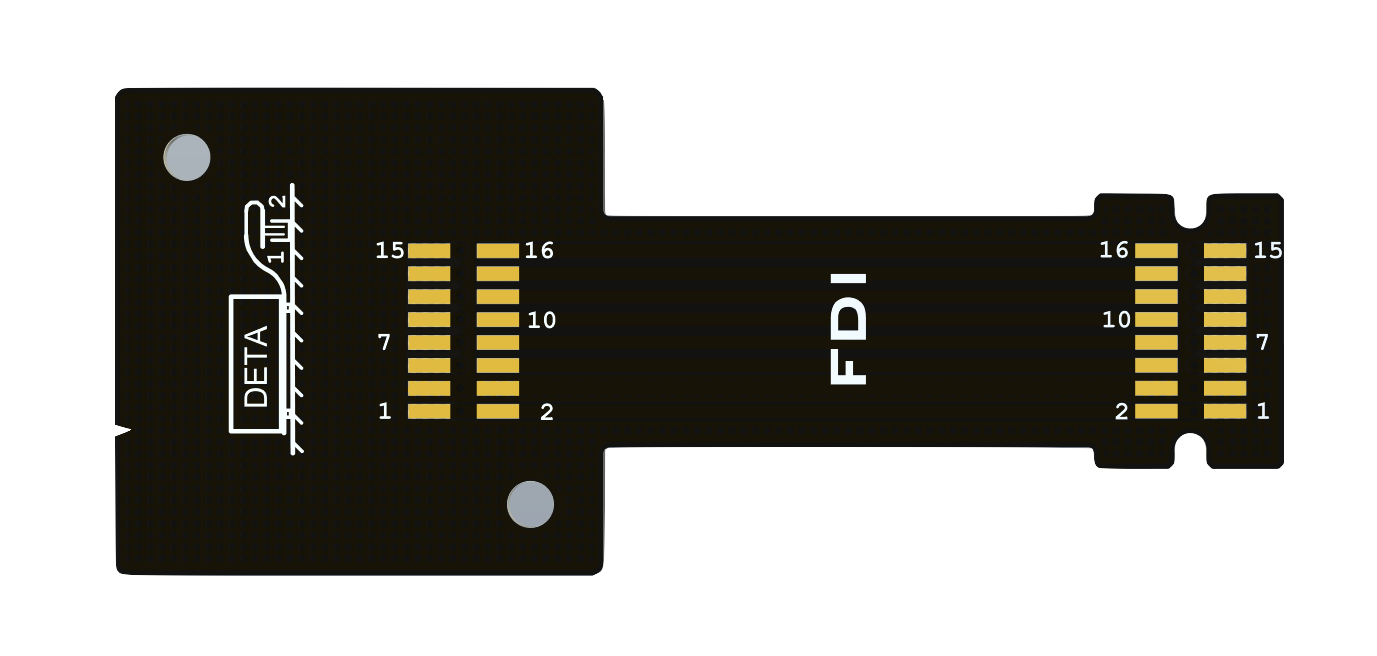 | fpc硬件设计参考下载 |
| DETA10/20/30P系列evb sch/pcb/lib |  | 载板硬件设计参考下载 |
# DETA10/20/30PW系列 防水版本电气
# DETA 3D STEP 模型
DETA 系列 Rugged STEP File DETA系列 共有以下4种型号:
| 型号 | 外形 | STEP |
|---|---|---|
| DETA10/20/30 box 封装 | | DETA10/20/30 box封装 STEP File |
| DETA10/20/30 PW防水封装 | | DETA10/20/30 防水版本STEP File |
# 硬件设计资料
# DETA10/20/30P系列 box版本电气
集成设计参考 共有以下2种型号:
| 型号 | 外形 | STEP |
|---|---|---|
| DETA10/20/30P系列fpc图纸 | | fpc硬件设计参考下载 |
| DETA10/20/30P系列evb sch/pcb/lib | | 载板硬件设计参考下载 |