# 模组安装
# 安装清单
1. 按照第8.2节中的指南将模组安全地安装到车载上。
2. 按照第8.3节中的指南安装两个GNSS天线,然后将天线电缆连接到 DETA100系列 的SMA接口。如果两个天线未安装在主前和辅后的标准配置中,则安装误差角需要进入配套的上位机软件中进行设置。
3. 给 DETA100系列 模组电源线接口提供直流电源,输入电压为5v-18v,或者直接通过ttl转usb(232转USB模块)供电。
4. 将 DETA100系列 模组主接口上的ttl转usb(232转USB模块)与计算机连接,同时打开上位机软件 FDIGroundStation,然后点击 connect 按钮连接,默认波特率为921600bps。
5. 如果 DETA100系列 模组的X轴安装方向与车载前进方向存在偏移,则需要将此偏移输入到上位机的参数表中进行设置。有关详细信息,请参见第10.8节。
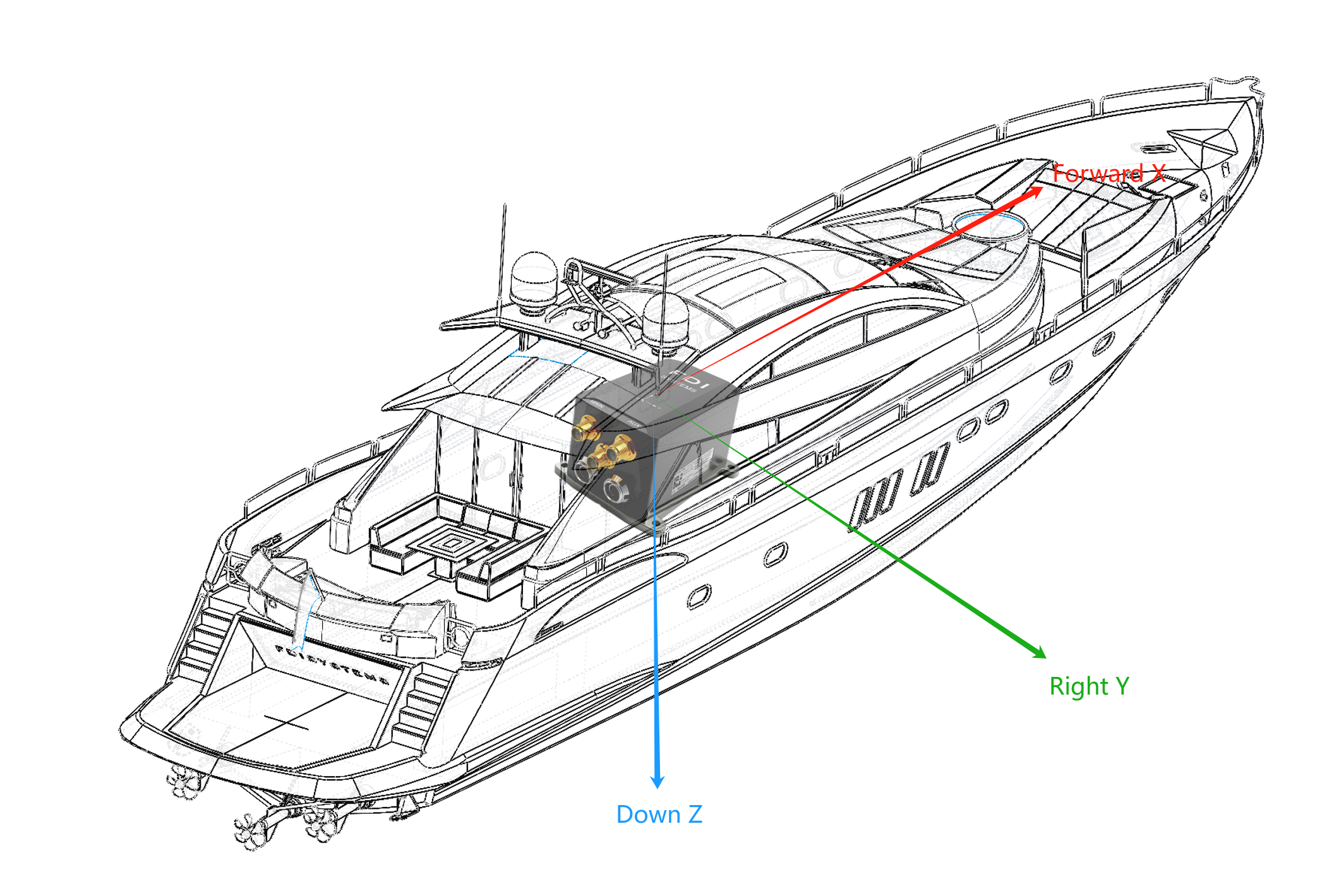
6. 测量GNSS主天线的相位中心到 DETA100系列 模组中心的杆臂(模组坐标系下),并将这些值输入到上位机的参数表中进行设置。请注意,无论GNSS双天线和 DETA100系列 模组如何安装在车载上,车身轴始终为X轴正向前和Z轴正向下,Y轴与X轴垂直并指向右。距离很近的话可以忽略。
7. 选择上位机中的运动模型从而决定是否开启非完整性约束。
8. 4G 版本需要用户在模组侧边 SIM 卡槽中插入物联网卡,同时通过侧边 usb 连接电脑配置差分账号,具体使用说明见《差分修正系统配置软件使用手册》,注意主接口需要供电,usb不具备供电能力。
9. 该系统现在已准备好可以使用了。
# 安装和对准
当在车载中安装 DETA100系列 模组时,正确的安装和对准对于实现良好的性能至关重要。在您的应用场景中选择安装位置有许多要求需要满足,包括:
1. DETA100系列 模组应安装在不超过其工作温度范围的区域内。
2. DETA100系列采用金属氧化封装,应使DETA100底部贴近大的散热良好的平面(金属或者铺铜的电路板)或保持一定的空气流动性,防止温度过高。
3. DETA100系列 模组的安装应远离振动。
4. 在无法准确测量杆臂的情况下,DETA100系列 模组与GNSS主天线的安装距离尽可能的小,从而尽可能的减小杆臂效应带来的影响。
5. DETA100系列 模组应安装在车载重心附近。
6. 如果使用磁力计数据作为航向参考,则 DETA100系列 模组应安装在距离动态磁干扰源至少20cm远的地方,比如远离大电流接线、大型电机等设备。
# 对准
对准 DETA100系列 模组最简单方法是安装轴与车身轴对齐。这意味着模组X轴向前指向车辆的正前部,而Z轴向下指向地面。
如果模组安装时无法与车身轴对准,则可以以其它方式安装,同时使用上位机软件配置对准偏移,参见第10.8节。当您认为车身轴水平时(Z轴与重力方向一致),可以进行快速对准:使用上位机软件中的 level 按钮对模组进行调平,使其俯仰角和横滚角修正到0°附近,请参见第10.5.2节。请注意,这只适合修正俯仰和横滚偏移。任何航向偏移,需要手动输入到上位机的参数表并保存。
# 供电
DETA100内置了低噪声的DCDC和LDO电源转换器;然而,仍然建议电源不要有明显的噪声。
电源应能够在所选电压下提供最大电流(6-28v@2A),并根据硬件规格中指示的最大功率计算得出任何极端操作条件(例如高温)的安全系数。
DETA100 在电源输入端包含一个主动保护电路,可保护设备免受欠压、过压和反极性事件的影响。建议始终在高于DETA100电气规范中提及的最低电压的情况下运行设备。使用接近最小电压的电源电压时要小心,因为微小的电压波动可能会触发欠压保护,导致开和关状态之间出现意外振荡。
# GNSS 天线
GNSS 天线应水平安装固定并且可清晰看到天空,同时尽可能地靠近 DETA100系列 模组。天线应安装远离任何射频发射器。天线下方应有一个最小半径为 60mm 的平面(平坦的导电表面,如铝板)。正确的天线安装对于 DETA100系列 模组的航向正确运行非常重要。
应在上位机 FDIGroundStation 中的参数配置界面配置主天线位置偏移,参见第10.8节。天线偏移从 DETA100系列 模组中心到主天线相位中心,并在模组坐标系下表示(X轴向前,Z轴向下)。天线偏移主要为了补偿杆臂速度,精确地设置天线偏移是非常重要的。不正确的GNSS天线偏移将导致转弯和角旋转情况下的性能下降。请注意,由于Z轴指向下,将天线安装在 DETA100系列 模组上方将导致负的Z轴偏移。
图17和图18中显示了具有标记轴的示例安装。在此安装中,将有一个正X轴天线偏移值、一个正Y轴天线偏移值和一个负Z轴偏移值。

*图 17: DETA100系列天线偏移等距视图 * 图 18: DETA100系列天线偏移正面图
辅助天线应直接安装在主天线的前面,尽可能保持距离。距离越远,定向精度就越高。请参见图19,例如安装在汽车上。如果无法将辅助天线直接安装在主天线前面,则可以安装在另一个位置。在这种情况下,必须准确地测量双天线航向偏移并在上位机软件的参数表中进行配置,请参见第10.8节。
图 19: 双天线安装示意图
DETA100系列工具包中提供的标准天线是HG-GOYH3062。它是一个L1/L2/L5RTK天线,支持GPS、GLONASS、BeiDou、Galileo和SBAS。它按照IP67标准进行环境密封。
如果您正在采购您自己的天线,请注意以下天线指南:
• 天线应能够同时接收L1和L2。仅使用L1天线的航向性能将显著下降。
• 天线需要有一个精确的相位中心,才能能够达到RTK状态。这需要双天线航向正常工作。低性能(低成本)天线通常无法实现良好的航向性能。
• 天线的LNA增益应至少为35dB。
• 天线至少支持GPS卫星导航系统。
• 天线应为密封型,包括接头。
如果您正在自己采购天线电缆,则必须确保天线有足够的增益来支持电缆上的损失。DETA100系列 模组要求连接器至少33dB增益
# GNSS 天线电缆
天线电缆应远离强大的射频发射器、高电流线路、高温和任何旋转或摆动机器。不要将天线电缆弯曲超过最大弯曲半径。建议使用宽电缆绳。
# 里程计
# 磁力计
DETA100系列 模组包含磁力计,它用来确定模组上电时的偏航角(可关闭),同时也可以提供全程的航向辅助以减少 GNSS 双天线受遮挡时航向的漂移。为了实现双天线受遮挡时的最佳航向性能,建议在距离动态磁干扰源至少 20cm 的地方安装 DETA100系列 模组。动态磁干扰源包括电机、大电流布线和运动的含有磁性的金属物件。当您仅使用磁力计初始化模组上电时的偏航角时,磁干扰不会导致模组的航向误差。磁力计在使用前必须进行软磁和硬磁校准,具体见第10.7节。FDISYSTEMS提供了全套的2D/3D磁校准算法,可以简单快速的完成校准。
# 振动抑制
与其他惯性系统相比,DETA100系列 模组能够容忍高水平的振动。这是由于其独特的陀螺仪设计和内置的划船圆锥算法。然而,模组所能容忍的振动量是有限的,而大程度的振动可能会导致模组的精度降低。
当将 DETA100系列 模组安装到振动平台时,有几种选择。建议首先尝试安装 DETA100系列 模组,看看它是否能承受振动。上位机软件 Data 界面中的 IMU 数据视图可以让您充分了解振动有多严重,请参见第10.4.3节。如果振动导致传感器超出传感器范围,则需要增加传感器范围。
如果 DETA100系列 模组无法承受振动,则有以下几种选项:
1.试着找到一个振动较小的安装点。
2.DETA100系列 模组下方可以安装一小块扁平的橡胶。
3.DETA100系列 模组可以安装在板上,然后通过隔振装置安装到平台上。