# Arduino
Arduino 读取 DETA10 惯导例程使用手册
目录
[1. 接线说明 3](#1. 接线说明)
[2. 例程下载与测试 3](#2. 例程下载与测试)
# 1. 接线说明
将 Arduino上的 5V 与 GND 引脚连接至 DETA10 惯导模块的 5V 与 GND 引脚, 将 Arduino 的 RX 引脚接入 DETA10 的 TX1 引脚;使用 USB 数据线连接 Arduino
与电脑。连接示意如图 1- 1 所示。
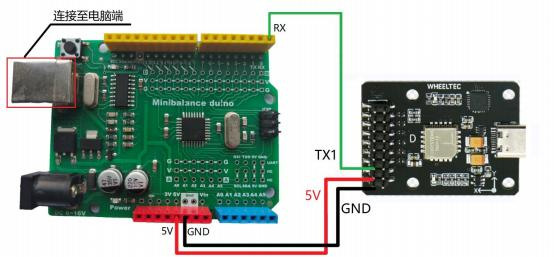
图 1-1 Arduino 与 DETA10 接线示意图
# 2. 例程下载与测试
在使用前,请先将惯导的波特率调至 115200。调节完惯导的波特率后,用ArduinoIDE 打开文件 DETA10ReadDataDemo 文件, 打开示例程序,选择对应的串口后下载程序,注意下载程序前需要先将板子上的RX 接线拔出,下载程序完成后再接入。
程序下载完成并重新接入 RX 的线后,Arduino 上的 LED 高频闪烁(接近常 亮),说明 Arduino 与 DETA10 成功建立有效的通信。点击串口监视器可查看读取到的数据。
图 2-1 点击串口监视器查看数据
打开串口监视器后可查看读取到的数据,例程默认只打印 x、y、z 三轴的加 速度和欧拉角,其中欧拉角的单位是弧度制。图 2-2 演示了一组数据。如果需要 打印其他数据,可在例程中找到void DataUnpacking(void)函数,取消相应的注释即可。对于数据的详细解释,请查看FDILINK通信协议.
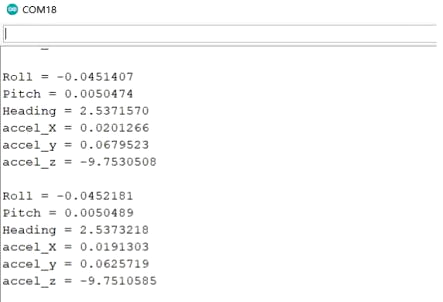
图 2-2 数据演示
← ROS FDIStandardCAN →