
# SIGMA快速使用指南
[安徽飞迪航空科技有限公司]
# 目录索引
# 1 使用前的准备工作
# 1.1 检查产品配件清单
- GNSS天线
- 2个高精度蘑菇头天线+2根射频线 FAKRA-Z转TNC

FAKRA-Z转TNC射频线+高精度蘑菇头天线
- 4G联网组件
- 1根4G天线+SIM卡
 4G天线
4G天线 物联网卡
物联网卡
- 1根4G天线+SIM卡
- 供电与通讯组件
- MX23A18NF1转DB9航插+USB转RS232/RS422模组
 航插电源线
航插电源线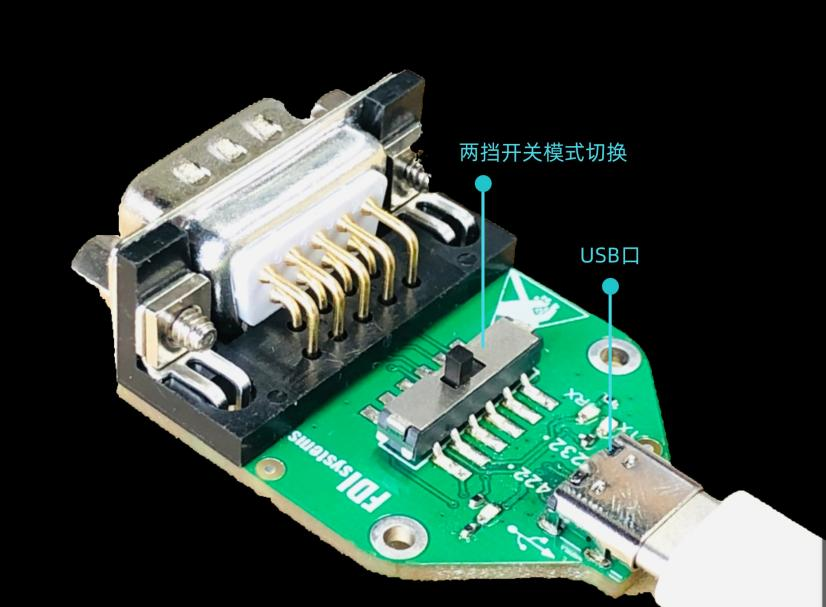 USB转接模组
USB转接模组
- MX23A18NF1转DB9航插+USB转RS232/RS422模组
# 1.2 检查配套软件、SDK以及驱动环境
- 上位机软件
- FDIGroundStation(仅支持Windows)
- 依赖环境:安装vcredist_x86.exe或完整版Microsoft Visual Studio。
- SDK支持
- 单片机/ROS/Matlab环境SDK 包
- ROS示例:
ahrs_driver.launch发布/fdi_imu等topic
- 驱动安装
- 必须安装CP210x串口驱动,否则无法识别设备
# 2 快速连接
# 2.1 SIGMA产品接口实物图
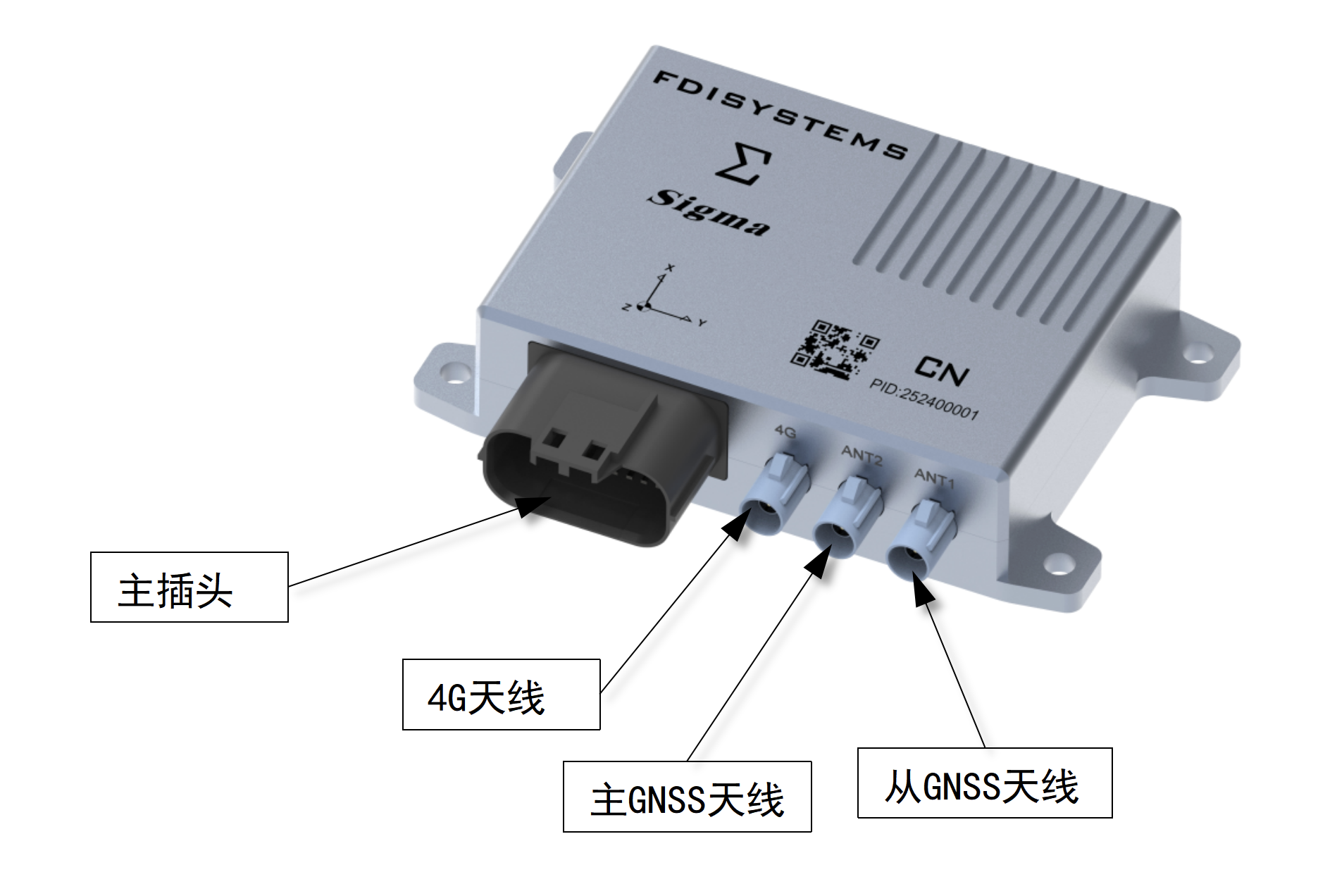
接口图
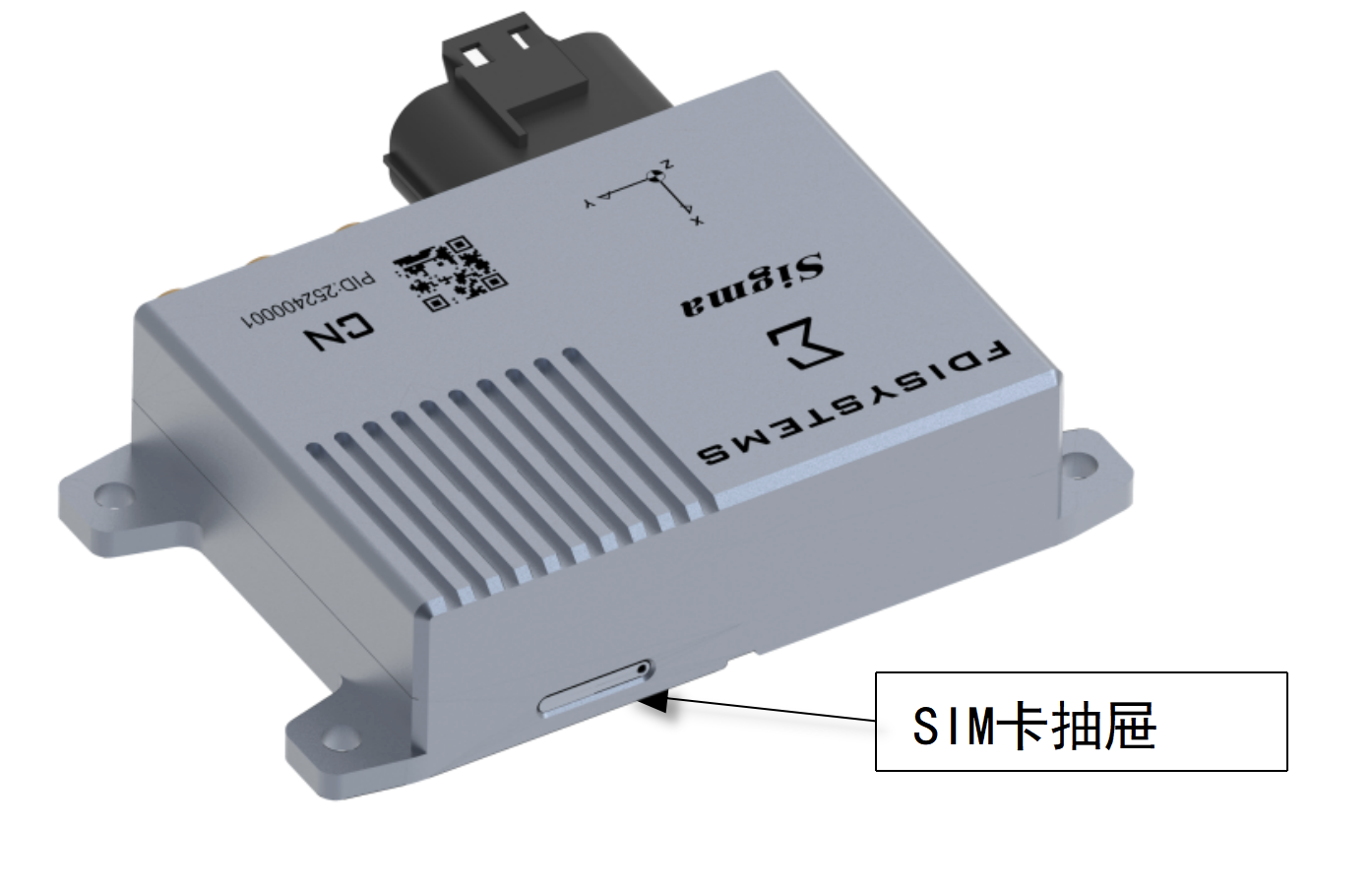
sim卡槽
# 2.2 连接说明
- 供电连接
- MX23A18NF1航插接直流电源(8V-48V)
- DB9-1口接USB转RS232模组(连接PC)
- GNSS天线连接
- 两根射频线TNC端接蘑菇头天线
- FAKRA-Z端分别接主/从GNSS天线接口
- 4G组件连接
- 4G天线接专用接口
- 用卡针插入SIM卡抽屉安装SIM卡
# 3 快速配置
# 3.1 基本操作
- GNSS天线放置于载体高处(无遮挡),主/从天线间距≥1m
- SIGMA模组固定于载体后轮中心处
- 航插DB9-1口接PC,供电启动
- 运行
FDIGroundStation,波特率设为921600bps连接设备
# 3.2 惯导双天线安装与校准说明
参考教程惯导双天线安装
| 校准类型 | 参数设置位置 | 关键参数 |
|---|---|---|
| RBV安装误差角 | Parameter → BODY栏 | BODY_TO_VEHICLE_ALGN_ROLL/PITCH/YAW |
| 双天线航向误差角 | Parameter → GNSS栏 | GNSS_ANTS_HEADING_BIAS |
| GNSS杆臂补偿 | Parameter杆臂配置界面 | 惯导到主天线的三维矢量(Z轴朝上为负) |
| 惯导-载体杆臂 | Parameter → ODOM栏 | 后轮中心在惯导坐标系下的三维位置 |
操作步骤
- 测量并填写参数
- 点击
Transmit→Write Flash保存- 无测量设备时可使用上位机自动校准功能(详见手册10.9.4节)
# 3.3 用户自定义参考映射

- 设置路径:Parameter → USER栏
- 映射杆臂:目标参考点在IMU坐标系下的三维坐标(单位:米)
- 生效条件:XYZ任一值非零时,所有输出数据(NED位置/速度/经纬高等)自动切换至映射点
- 恢复默认:XYZ值归零后重启设备
# 3.4 AID滤波配置快速入门

AID_ACCEL_GRAVITY:加速度计稳定横滚/俯仰角AID_GNSS_DUAL_ANT_HEADING_UPDATE:启用双天线航向融合AID_GNSS_POS/VEL_UPDATE:启用GNSS位置/速度融合AID_ZERO_VEL_UPDATE:静止超2秒时零速修正
车载最佳配置(开启NHC)

- 设置动态模型:
DYNAMICS → AUTODRIVER_MODEL - 启用滤波开关:
AID_CAR_CENT_ACCEL_NHC_ENABLEDAID_CAR_YZ_ZERO_VEL_NHC_ENABLED
- 前提:完成RBV校准(设备坐标系与载体坐标系对齐)
Tips
- NHC在GNSS中断时抑制INS误差发散
- 模组需安装于后轮中心,否则需手动测量后轮中心坐标(见3.2节)
固件更改日志 →